Lista de componentes
|
|
|
Manipulador |
Controlador (opcional (opcional: Consulte o Apêndice) |
|
|
|
Ensinar pendente |
Cabo de alimentação do controlador |
|
|
|
Cabo de conexão do manipulador |
Manual do usuário/guia rápido |
Nome de cada peça e funções
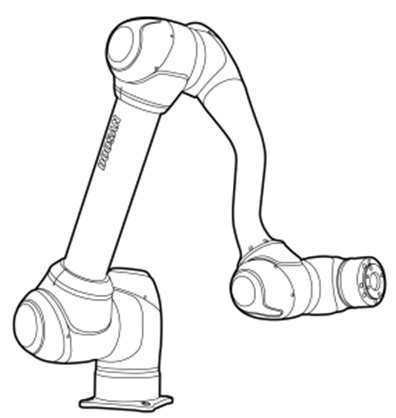
Manipulador
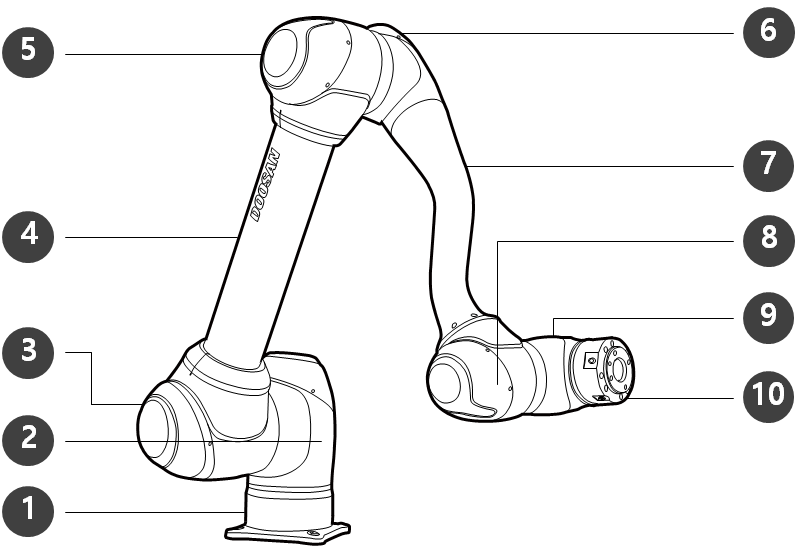
Nome de cada peça
|
No. |
Nome |
No. |
Nome |
|---|---|---|---|
|
1 |
Base |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Link1 |
9 |
J6 |
|
5 |
J3 |
10 |
Flange da ferramenta |
ㅤ
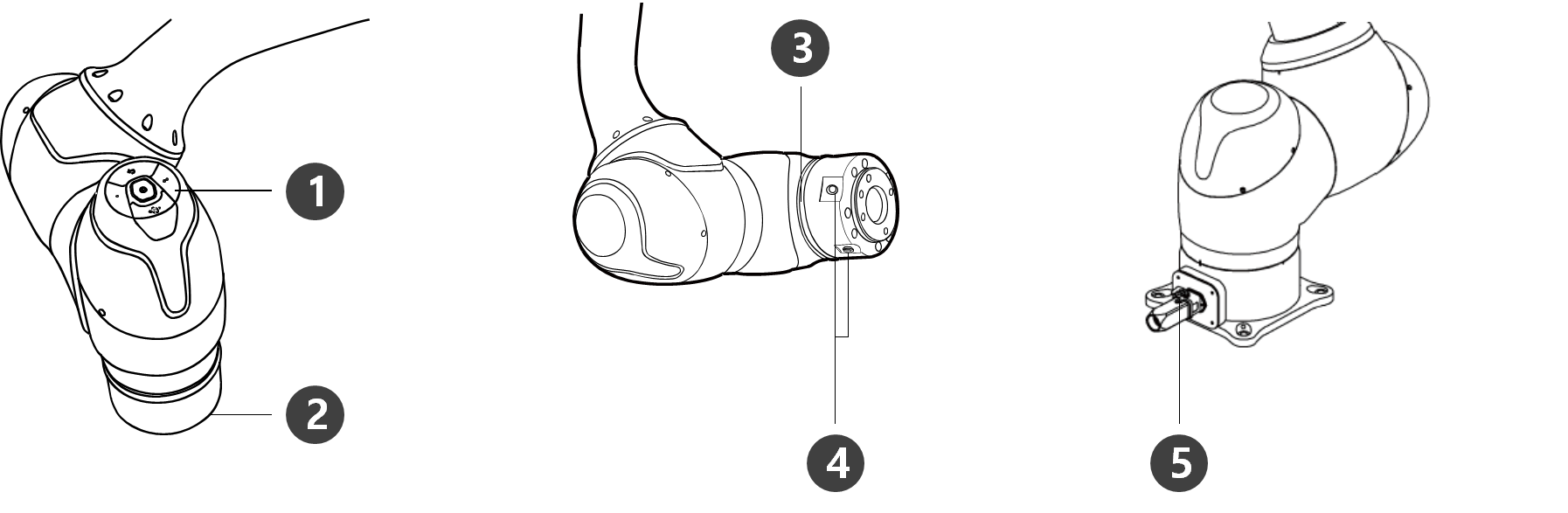
Principais recursos
|
No. |
Itens |
Descrição |
|---|---|---|
|
1 |
Cockpit |
Botões de operação [opcional] para ensino e operação diretos |
|
2 |
Flange da ferramenta |
Área para instalar ferramentas. |
|
3 |
3 |
Exibe o status do robô com cores diferentes. Para obter mais informações sobre o status do robô, consulte a Cor do LED de Status e Flange para cada Modo. Versão: Série H. A série H é fornecida com um LED adicional no eixo de 1 indicando o mesmo estado e cor. |
|
4 |
E/S do flange |
Porta de E/S para controle da ferramenta.
|
|
5 |
Conector |
Usado para fornecer energia e comunicação do robô. |
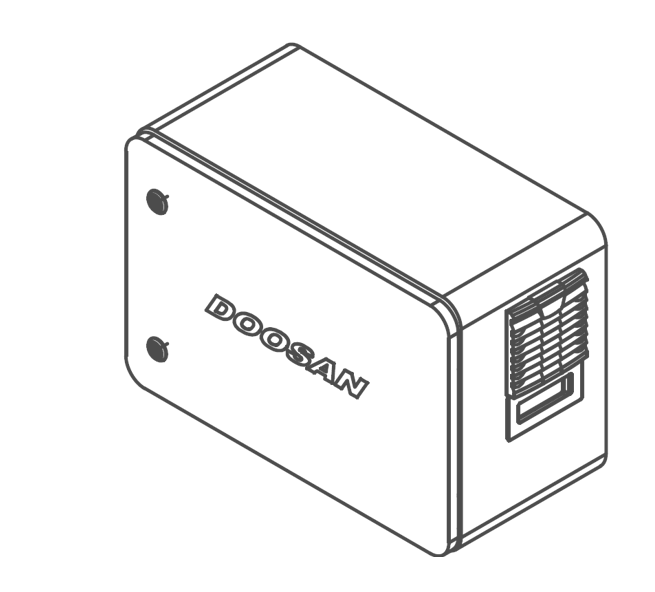
Controlador
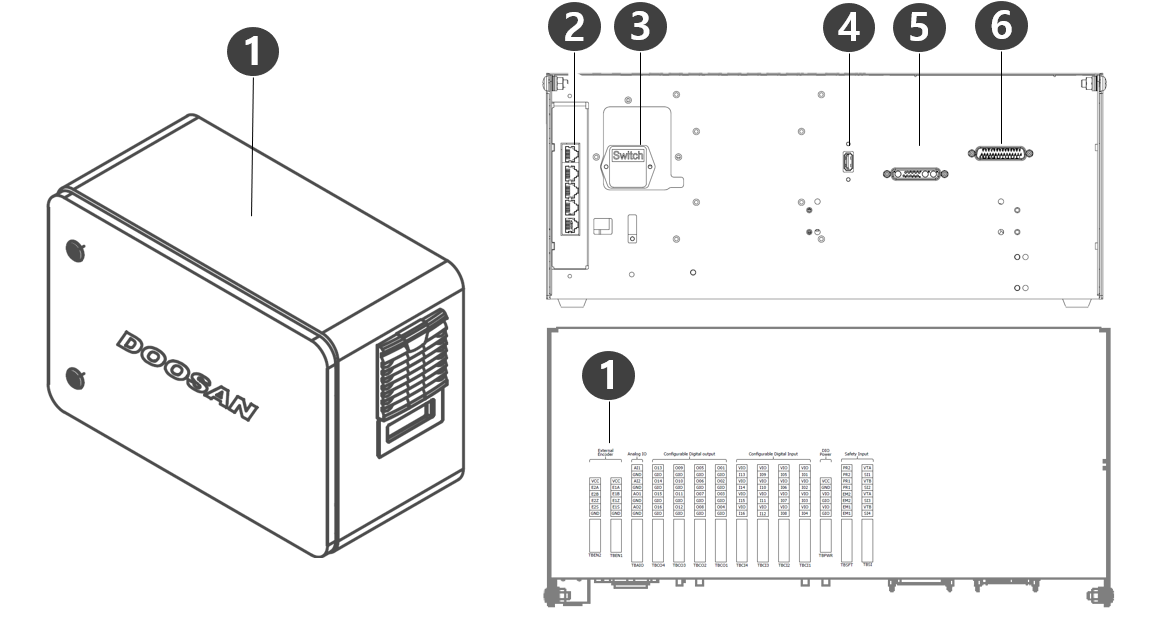
|
No. |
Itens |
Descrição |
|---|---|---|
|
1 |
Terminal de conexão de E/S (interno) |
Ele pode ser conetado com controladores ou periféricos de outros robôs. |
|
2 |
Terminal de conexão de rede |
Usado para conexão ao terminal de conexão de rede dentro do controlador para usar laptops, dispositivos TCP/IP e equipamentos Modbus. |
|
3 |
Terminal/interruptor de conexão de energia |
Usado para conectar a rede elétrica do controle para ligá-lo ou desligá-lo. Para obter mais informações, consulte Ligar/Desligar o sistema. |
|
4 |
Terminal de conexão USB |
Usado para armazenar registros criados enquanto o robô está operando no armazenamento USB ou tarefas de exportação e importação. |
|
5 |
Terminal de conexão do cabo do manipulador |
Usado para conectar o cabo do manipulador ao controlador. |
|
6 |
Ensine o terminal de conexão do cabo do pendente |
Usado para conectar o cabo do pendente de instrução ao controlador. |
Observação
Se você escolher um controlador opcional, consulte o manual do usuário no apêndice para conectar antes do uso.
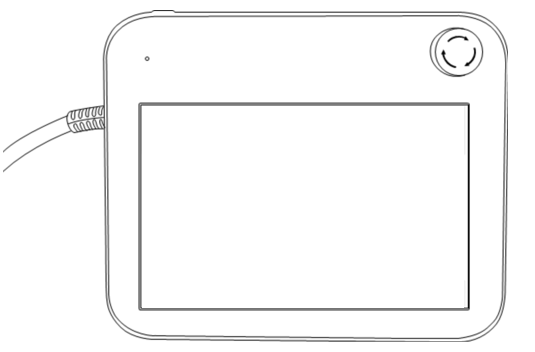
Ensinar pendente
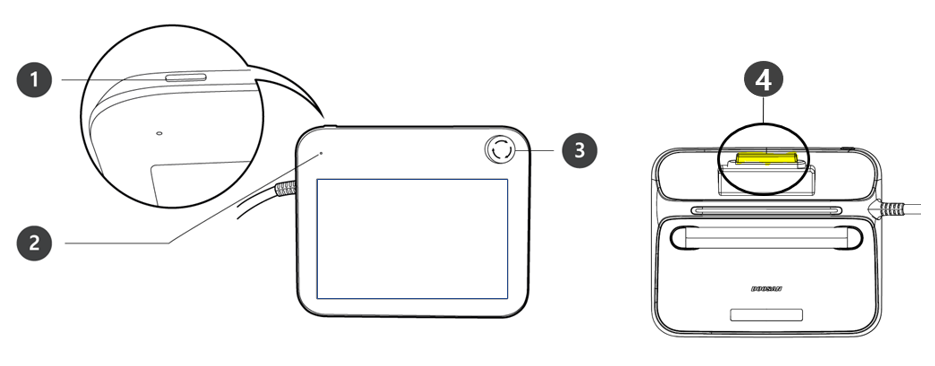
|
No. |
Itens |
Descrição |
|---|---|---|
|
1 |
Botão Liga/Desliga |
|
|
2 |
LED de energia |
|
|
3 |
Botão de parada de emergência |
|
|
4 |
Botão de orientação manual (Interruptor de ativação de 3 posições 3PE) |
|
Observação
-
Se o pendente de instrução precisar ser protegido e montado durante a operação, a tampa macia fornecida por nós o torna mais seguro e fácil de usar.
-
Novo TP (TP-02) Função adicionada: Guia de mão de dupla função
-
O TP existente (TP-01) não pode ser usado no controlador integrado. (Mapa de pinos alterado devido ao switch 3PE)
-
O novo TP (TP-02) pode ser usado no controlador existente, mas o LED é alterado para uma única cor (vermelho) e exibido, e funções adicionais não podem ser usadas.
-
Configuração do sistema
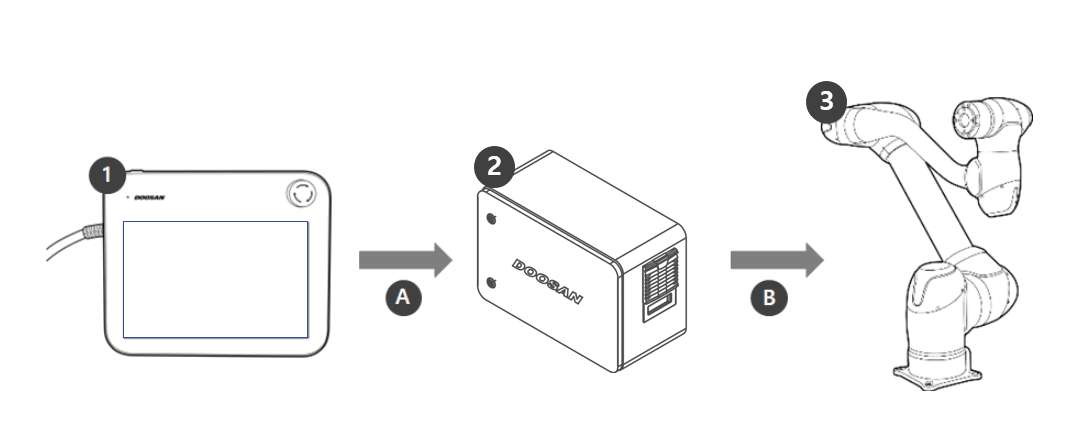
|
No. |
Nome |
Descrição |
|---|---|---|
|
1 |
Ensinar pendente |
Este dispositivo gerencia todo o sistema e é capaz de ensinar poses específicas do robô ou fazer configurações relacionadas aos manipuladores e controladores. |
|
2 |
Controlador |
Ele controla o movimento do robô de acordo com a pose ou movimento definido pelo pendente de instrução. Possui várias portas de E/S que permitem a conexão e o uso de vários equipamentos e dispositivos. |
|
3 |
Manipulador |
É um robô colaborativo industrial que pode realizar tarefas de transporte ou montagem com várias ferramentas. |
|
A |
Comando/Monitoramento |
|
|
B |
Fonte de alimentação/rede |
|