Protocolo expandido - Configuração do dispositivo de E/S PROFINET (dispositivo pnio)
Os controladores robóticos da Doosan Robotics suportam a função PROFITNET IO Device (Slave), que permite a modificação de dados após a leitura dos parâmetros do robô a partir de um dispositivo externo (PROFINET IO Controller/Master). (Por exemplo, Monitoramento de parâmetros do robô, Registro de uso geral (Bit, Int, Flutuante) – Usando Registro de uso geral (GPR))
Nota) Para obter mais informações sobre PROFINET, visite http://www.profibus.com
Protocolo expandido - Configuração do adaptador Ethernet/IP (adaptador EIP)
Os controladores robóticos da Doosan Robotics suportam a função Adaptador Ethernet/IP (Escravo), que permite a modificação de dados após a leitura dos parâmetros do robô a partir de um dispositivo externo (Ethernet/IP Scanner/Master). (Por exemplo, Monitoramento de parâmetros do robô, Registro de uso geral (Bit, Int, Flutuante) – Usando Registro de uso geral (GPR))
Nota 1) Para obter mais informações sobre Ethernet/IP, consulte www.odva.org.
Observação 2) O IP padrão inicial é 192.168.137.50. Depois disso, você pode alterar o IP do controlador dependendo do uso do aplicativo de controle PLC.
Usando o Protocolo Expandido
As funções do dispositivo de E/S PROFINET (dispositivo PNIO) e do adaptador Ethernet/IP (adaptador EIP) são iniciadas juntas na inicialização do controlador e estão em estado de espera de conexão com o dispositivo Mestre. Portanto, para usar a função, é necessário conectar e configurar o Master. Cada dispositivo Master tem caraterísticas diferentes, por isso é necessário verificá-los.
Observação
A seguir estão descrições das características de implementação de funções gerais para Ethernet Industrial.
-
A função Ethernet Industrial dos controladores Doosan Robotics não usa um ASIC separado, mas implementa sua função baseada em TCP/IP, portanto, não suporta desempenho em tempo real.
-
A saída de dados para dispositivos externos tem marcações idênticas (PNIO, EIP), mas a entrada de dados para o robô só tem estruturas idênticas e não se vincula. Portanto, a saída de dados do controlador PNIO não é sincronizada com os dados de saída do scanner EIP.
-
Para a tabela de E/S de PNIO e EIP, consulte um documento separado (ou anexo).
Mapa GPR completo Ethernet/IP
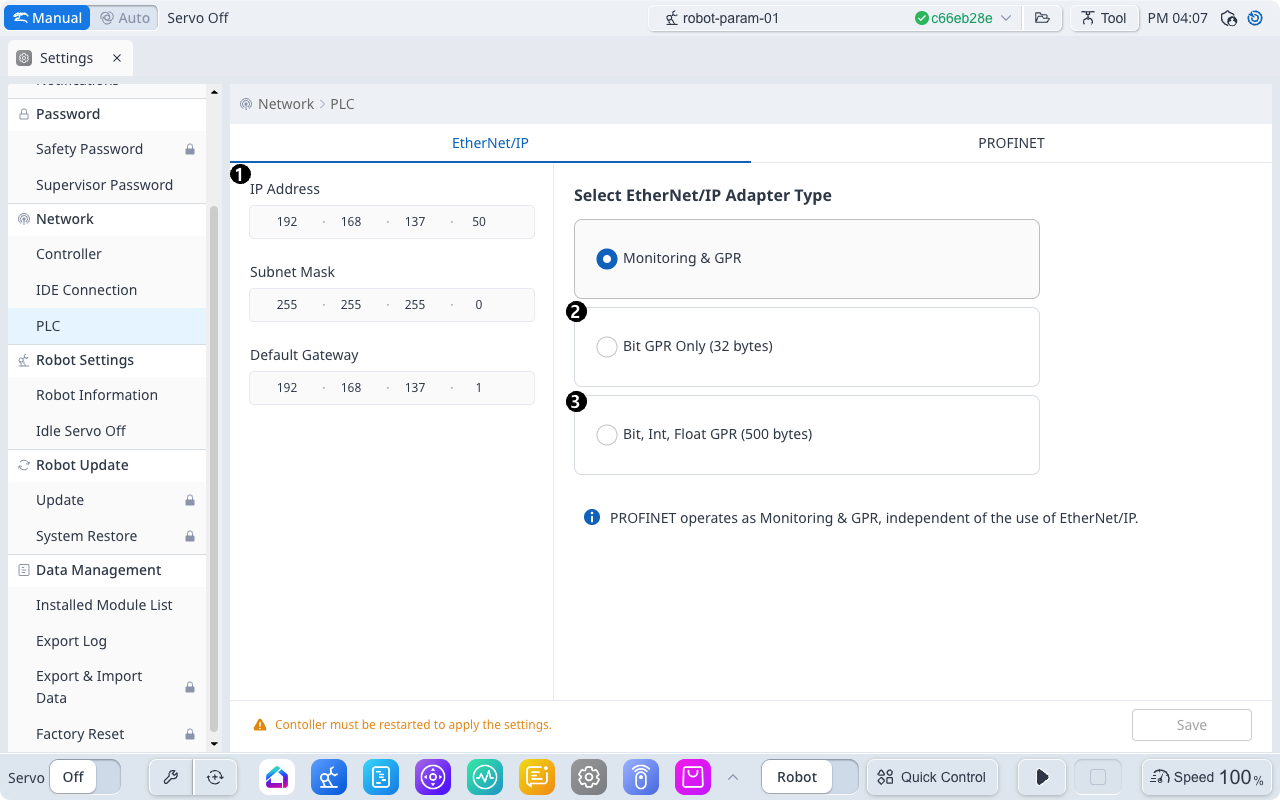
O Mapa GPR completo Ethernet/IP está disponível e suporta diferentes tipos de E/S no robô.
-
GPR de E/S de bits 24ea
-
GPR de E/S inteiro 50ea
-
GPR de E/S flutuante 50ea
No menu esquerdo do módulo Configurações, selecione PLC para ir para a tela abaixo. (Consulte Configurar na seção Rede)
Na imagem abaixo, o item 3 é Mapa GPR completo, e a configuração é salva somente após salvar e reinicializar.
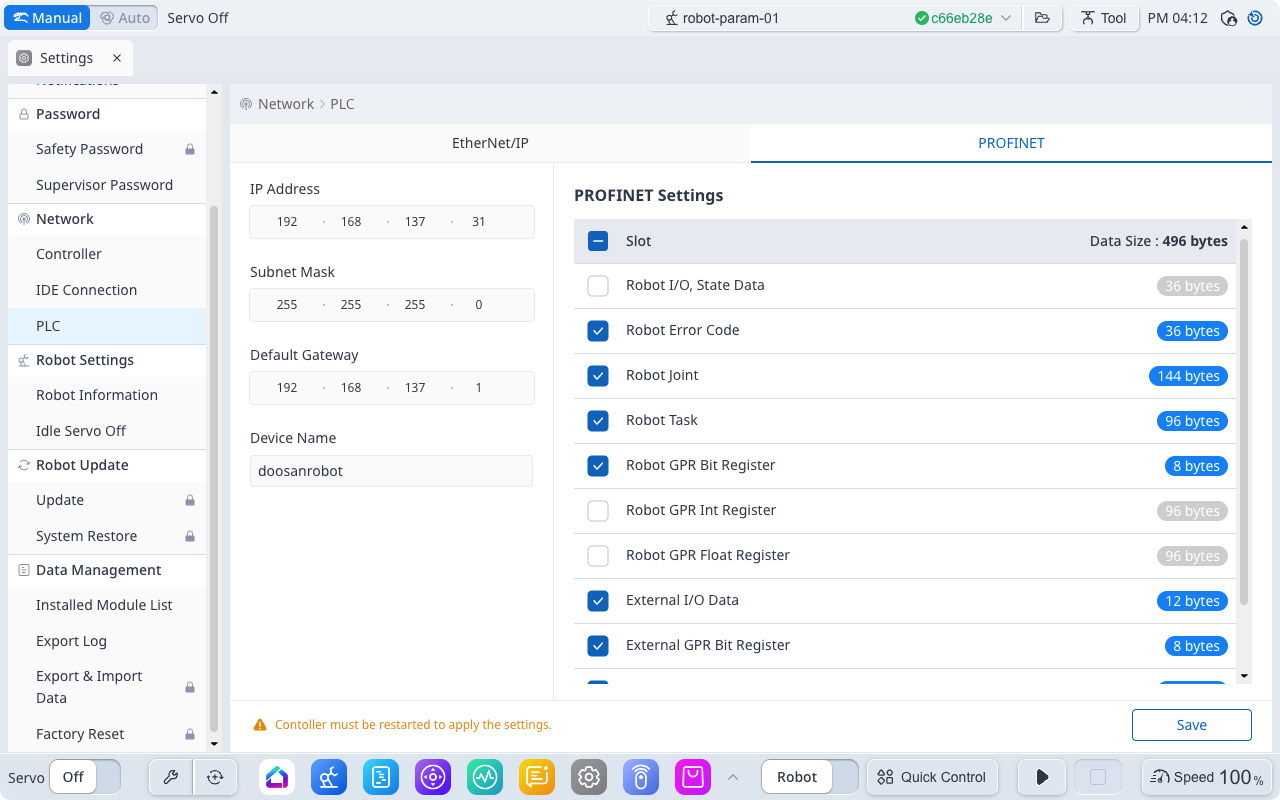
Slot PROFINET
Para otimização de rede, somente slots interessados podem usar a capacidade de executar Transação.
-
Slot no 1: Estado do robô (T2O)
-
Slot no 2: Código de erro do robô (T2O)
-
Slot no 3: Articulação (T2O)
-
Slot no 4: Tarefa (T2O)
-
Slot no 5: GPR de bits (T2O)
-
Slot no 6: GPR Int (T2O)
-
Slot no 7: GPR flutuante (T2O)
-
Slot no 8: CONTROLE DE E/S (O2T)
-
Slot no 9: Bit GPR (O2T)
-
Slot no 10: GPR Int (O2T)
-
Slot no 11: GPR flutuante (O2T)
No menu esquerdo do módulo Configurações, selecione PLC e selecione a guia Profinet para ver a tela abaixo. (Consulte Configurar na seção Rede)
Você pode usar a caixa de seleção no centro para selecionar apenas os slots nos quais o usuário está interessado, e as configurações são salvas somente após salvar e reinicializar.
Informações do código de erro do robô
Em um ambiente sem TP (HMI), o usuário pode verificar as informações do código de erro do robô por meio do PLC (Consulte Configurar na seção Rede)
Ethernet/IP
Observação
Ethernet/IP reflete até dois códigos de erro devido ao limite de transação (500 bytes).
|
Deslocamento de bytes |
Descrição |
|---|---|
|
36 |
Principal e Secundário (Código de erro no 1)
|
|
40 |
Ano, Mês e Dia e Hora (Código de erro no 1)
|
|
44 |
Minuto e segundo e mili-segundo (código de erro no 1)
|
|
48 |
Principal e Secundário (Código de erro no 2)
|
|
52 |
Ano, Mês e Dia e Hora (Código de erro no 2)
|
|
56 |
Minuto e segundo e mili-segundo (código de erro no 2)
|
PROFINET: Slot no 2
|
Deslocamento de bytes |
Descrição |
|---|---|
|
0 |
Principal e Secundário (Código de erro no 1)
|
|
4 |
Ano, Mês e Dia e Hora (Código de erro no 1)
|
|
8 |
Minuto e segundo e mili-segundo (código de erro no 1)
|
|
12 |
Principal e Secundário (Código de erro no 2)
|
|
16 |
Ano, Mês e Dia e Hora (Código de erro no 2)
|
|
20 |
Minuto e segundo e mili-segundo (código de erro no 2)
|
|
24 |
Principal e Secundário (Código de erro no 3)
|
|
28 |
Ano, Mês e Dia e Hora (Código de erro no 3)
|
|
32 |
Minuto e segundo e mili-segundo (código de erro no 3)
|