Cuidado
Antes de tentar a amostra, certifique-se de ler e seguir as Precauções. Para obter mais informações, consulte a PARTE 1. Manual de Segurança.
Observação
Esta amostra requer o arquivo Task Writer criado em Try Compliance command samples
-
Altere o estado do Servo para Ligado.
-
Mude o Modo de operação para Manual.
-
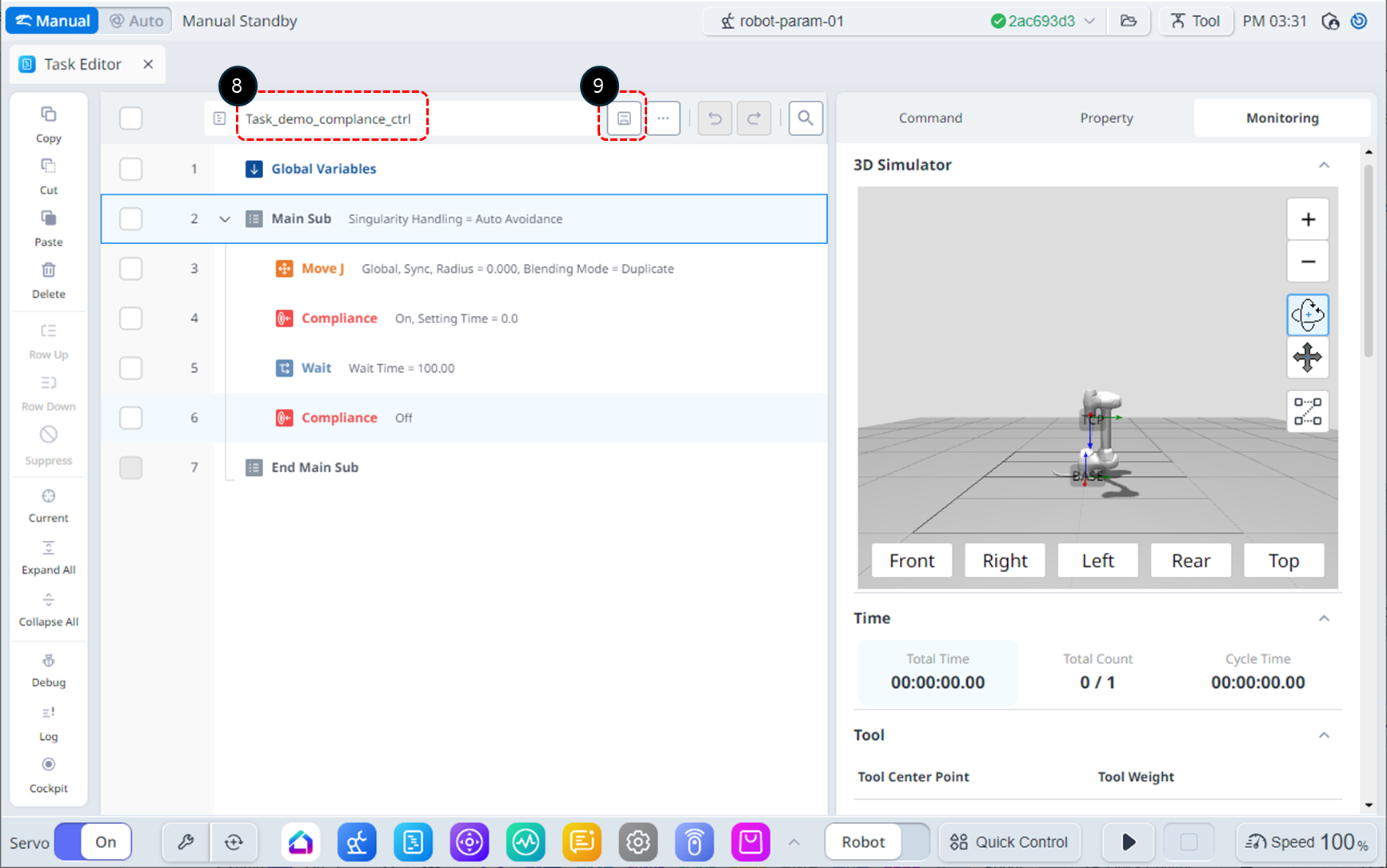
Selecione o módulo Editor de tarefas no menu inferior.
-
Clique no botão Arquivo.
-
Clique no botão Abrir.
-
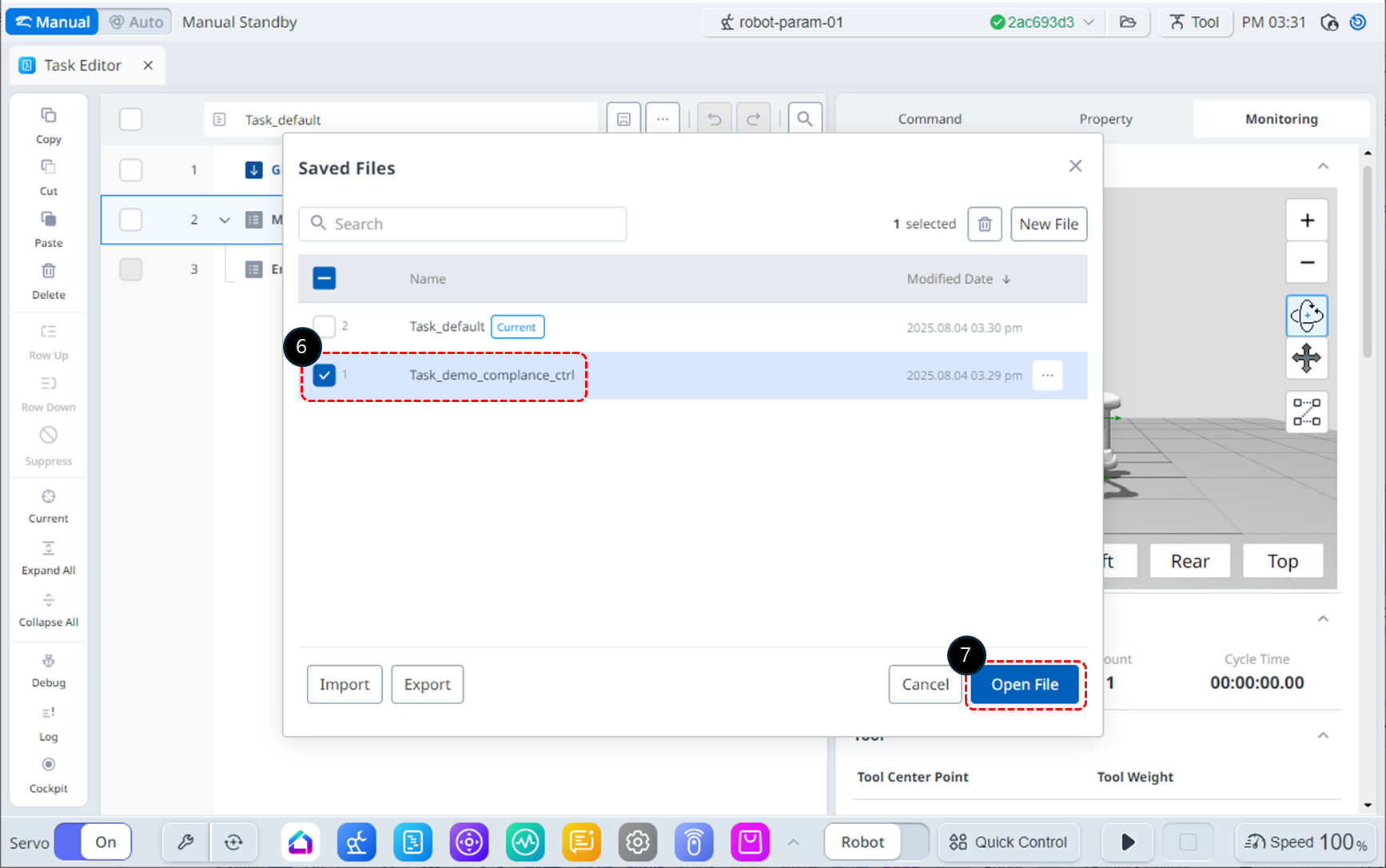
Selecione o arquivo Task_demo_compliance_ctrl criado em Exemplos de comando Tentar conformidade.
-
Clique no botão Abrir arquivo.
-
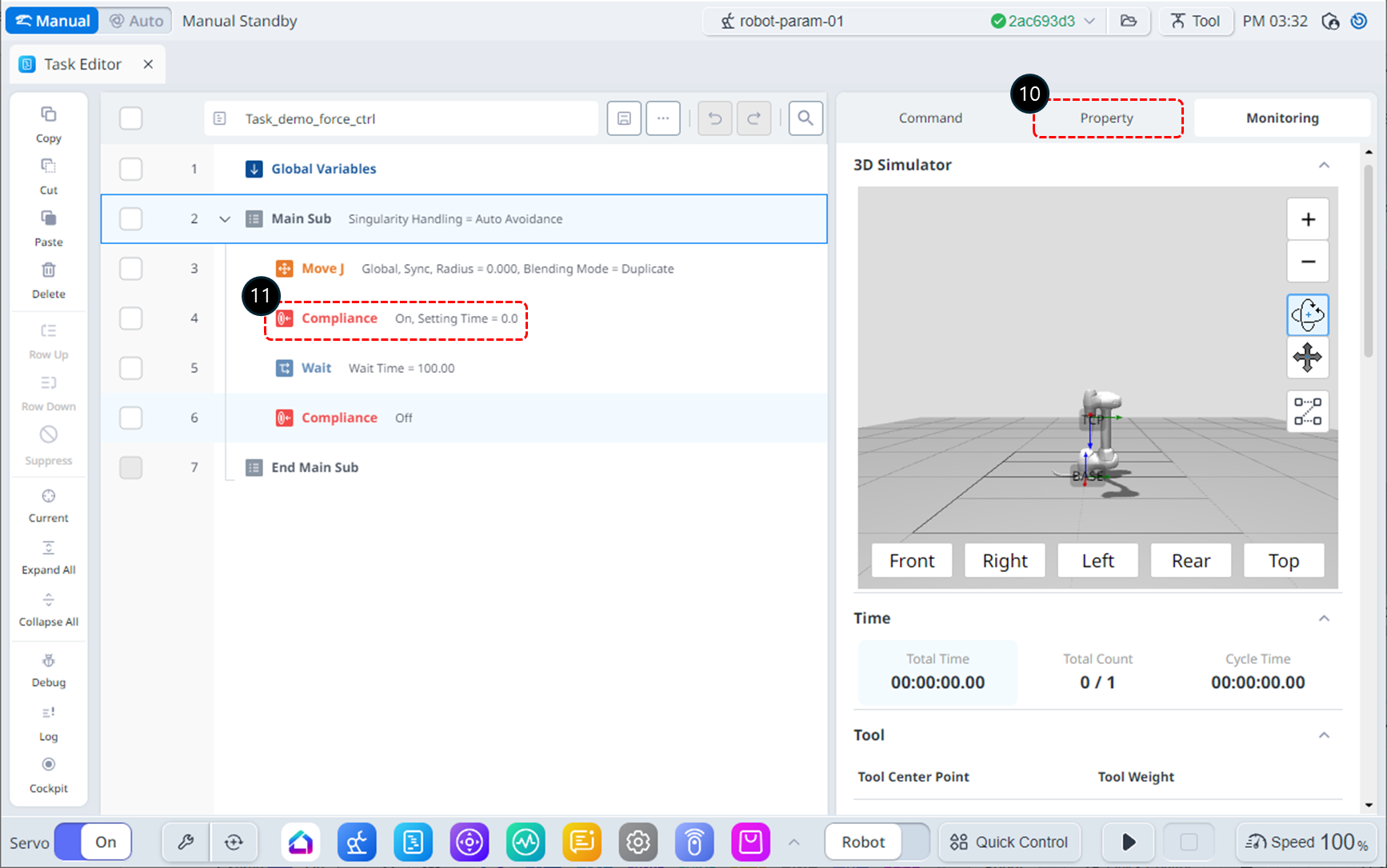
Renomeie o arquivo para Task_demo_force_ctrl.
-
Clique no botão Salvar para salvar o nome do arquivo.
-
Selecione a guia Propriedade.
-
Escolha o comando de conformidade na quarta linha.
-
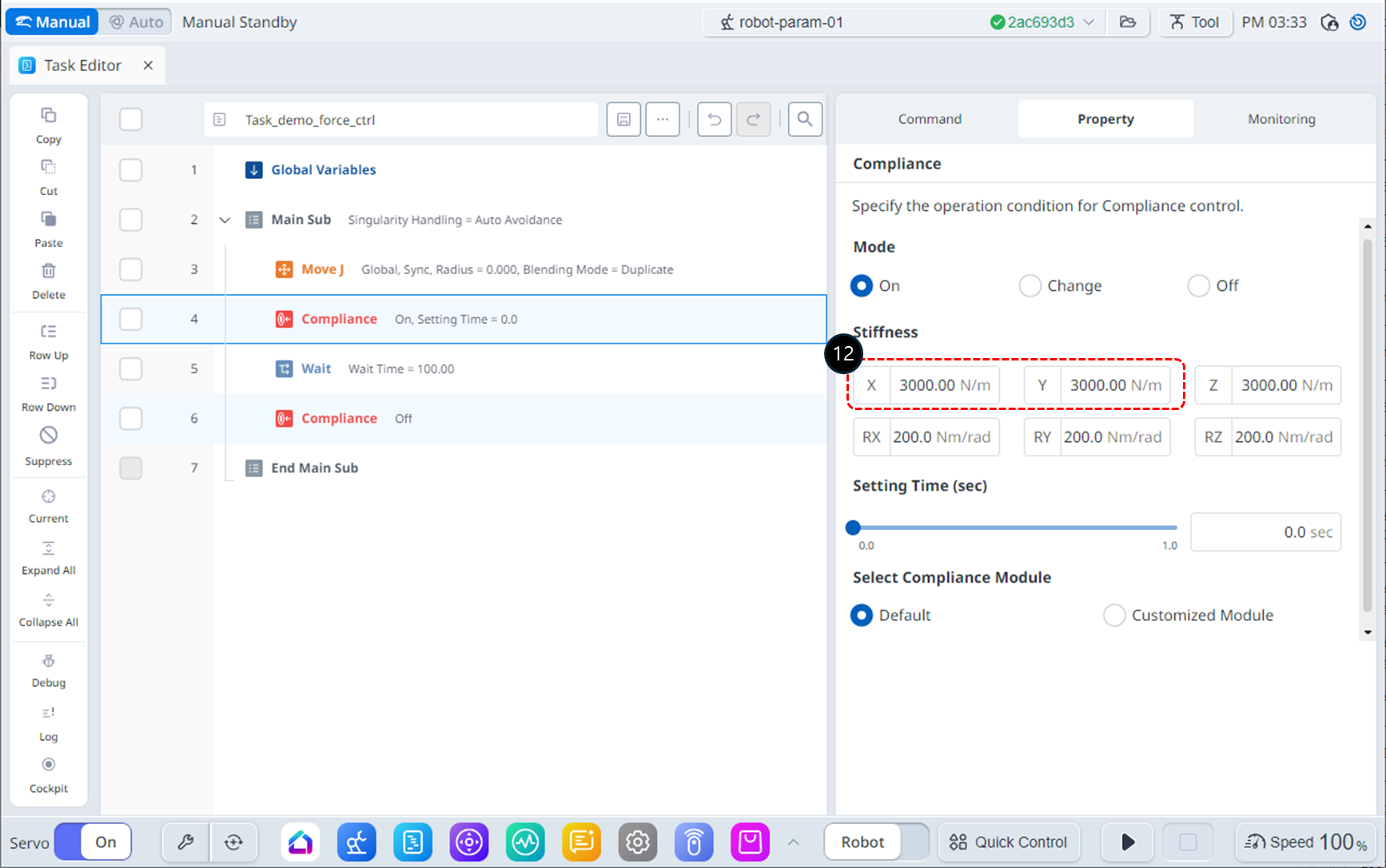
Defina a rigidez para seus valores padrão da seguinte forma.
-
X, Y, Z : 3000 N/m (padrão)
-
RX, Ry, Rz : 200 Nm/rad (padrão)
-
-
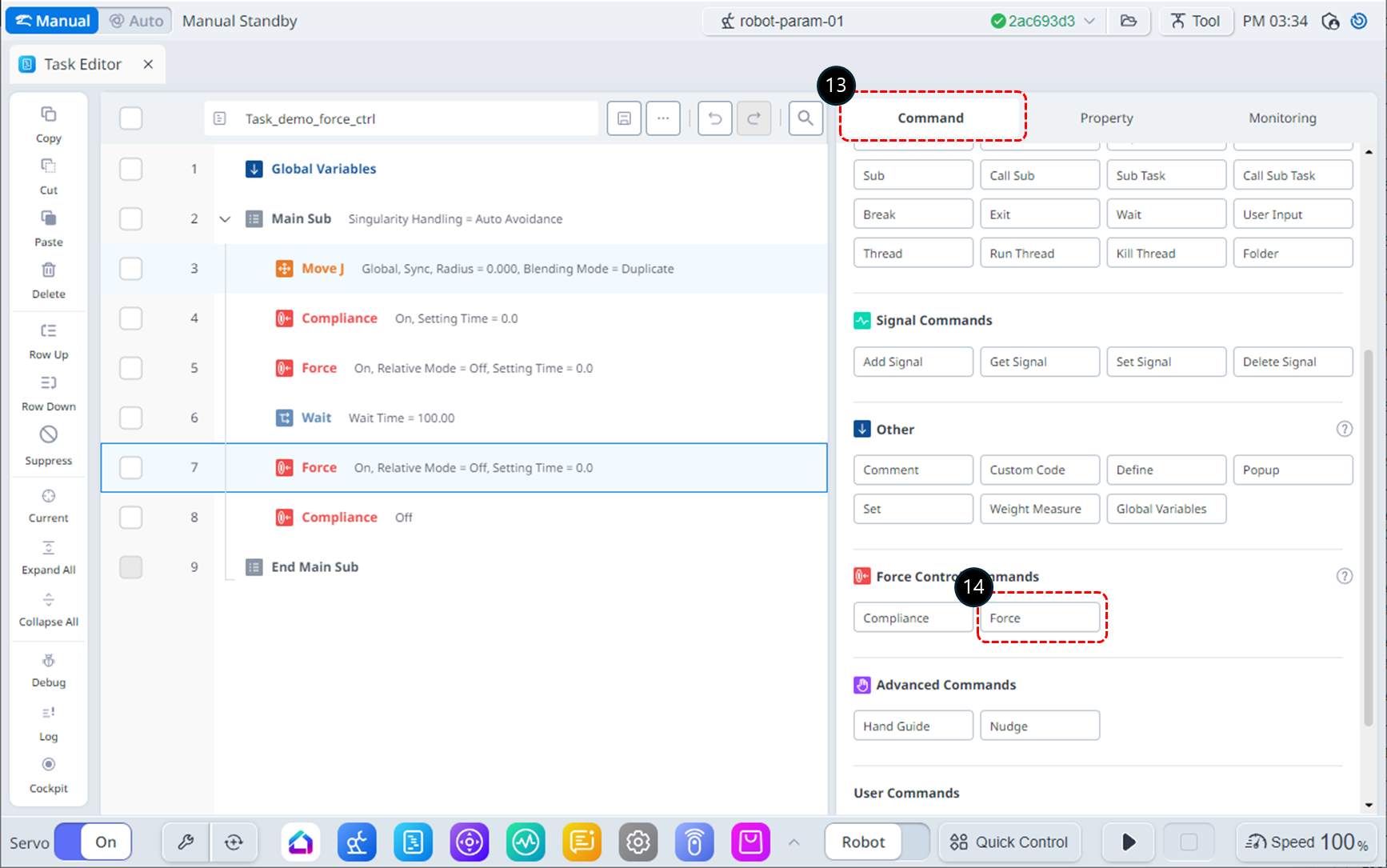
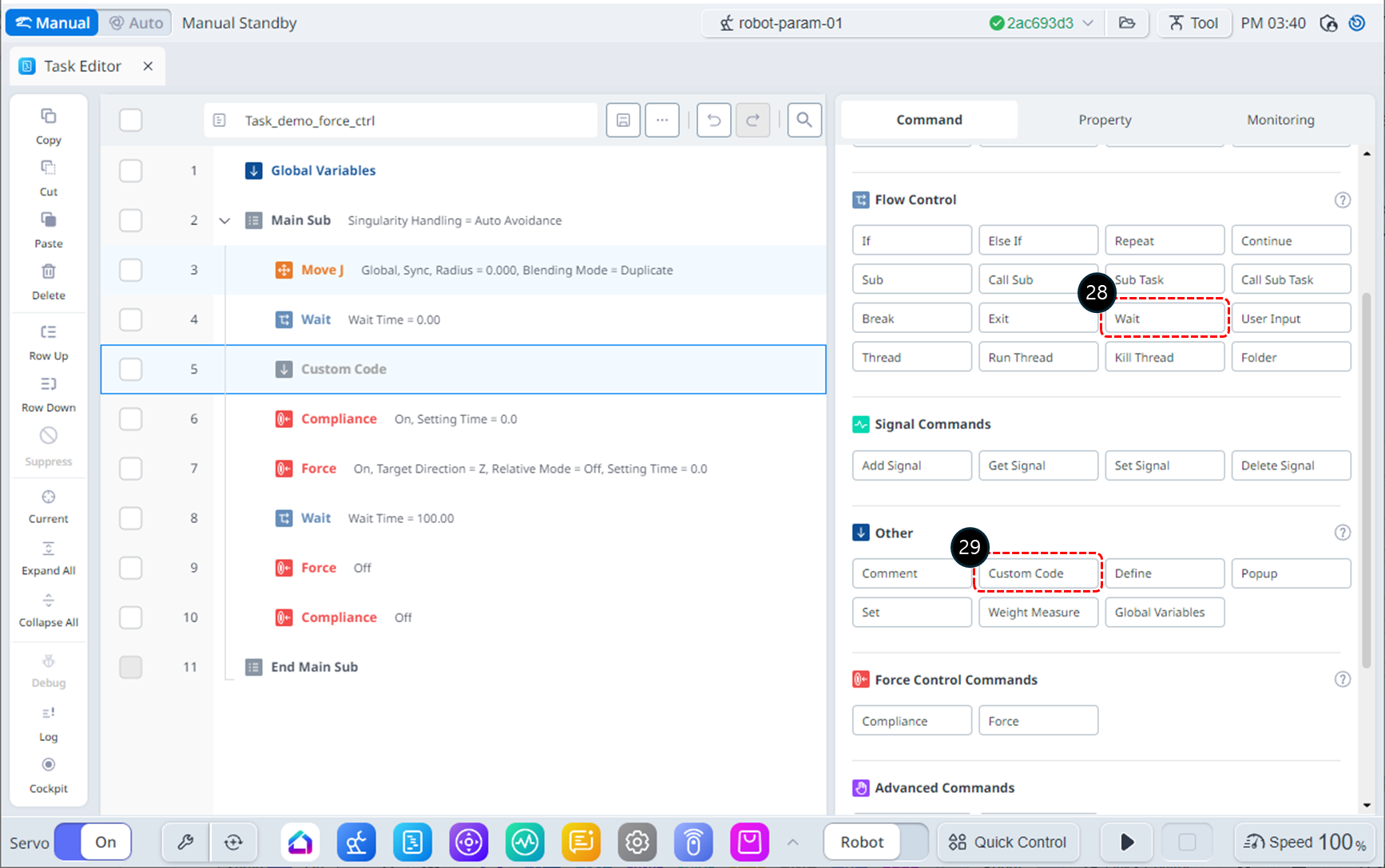
Selecione a guia Comando.
-
Adicione um comando Força à quinta e sétima linhas. Esses comandos serão usados para ativar e desativar o Force Control.
-
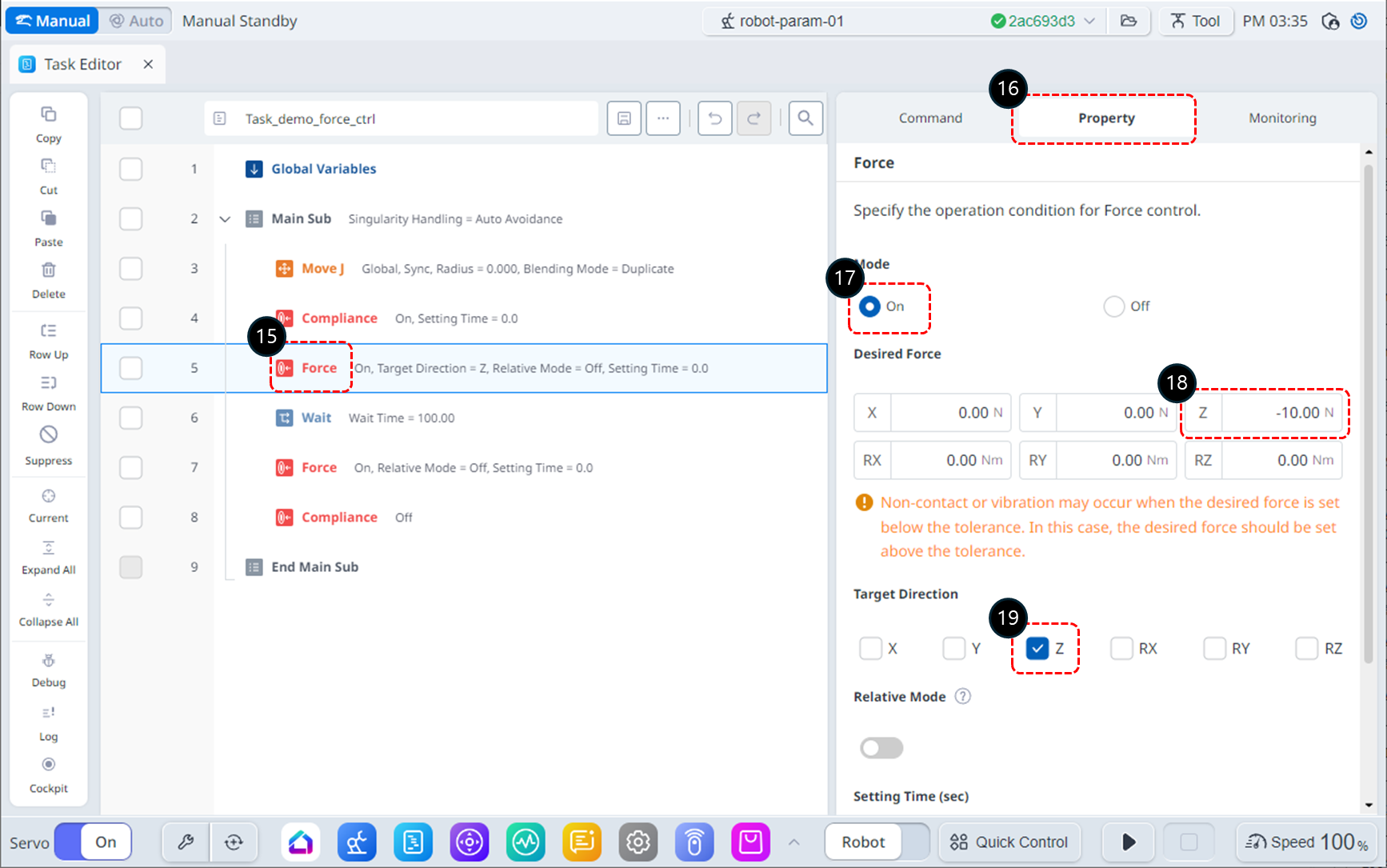
Selecione o comando Força na 5a linha.
-
Vá para a guia Propriedade.
-
Defina o Modo da seguinte forma: O modo LIGADO ativa o controle de força.
-
Modo : Ligado
-
-
Defina a Força desejada da seguinte forma.
-
X : 0 N (padrão)
-
Y : 0 N (padrão)
-
Z : -10 N
-
RX, Ry, Rz : 0 Nm/rad (padrão)
-
-
Na Direção alvo, marque apenas o eixo z.
-
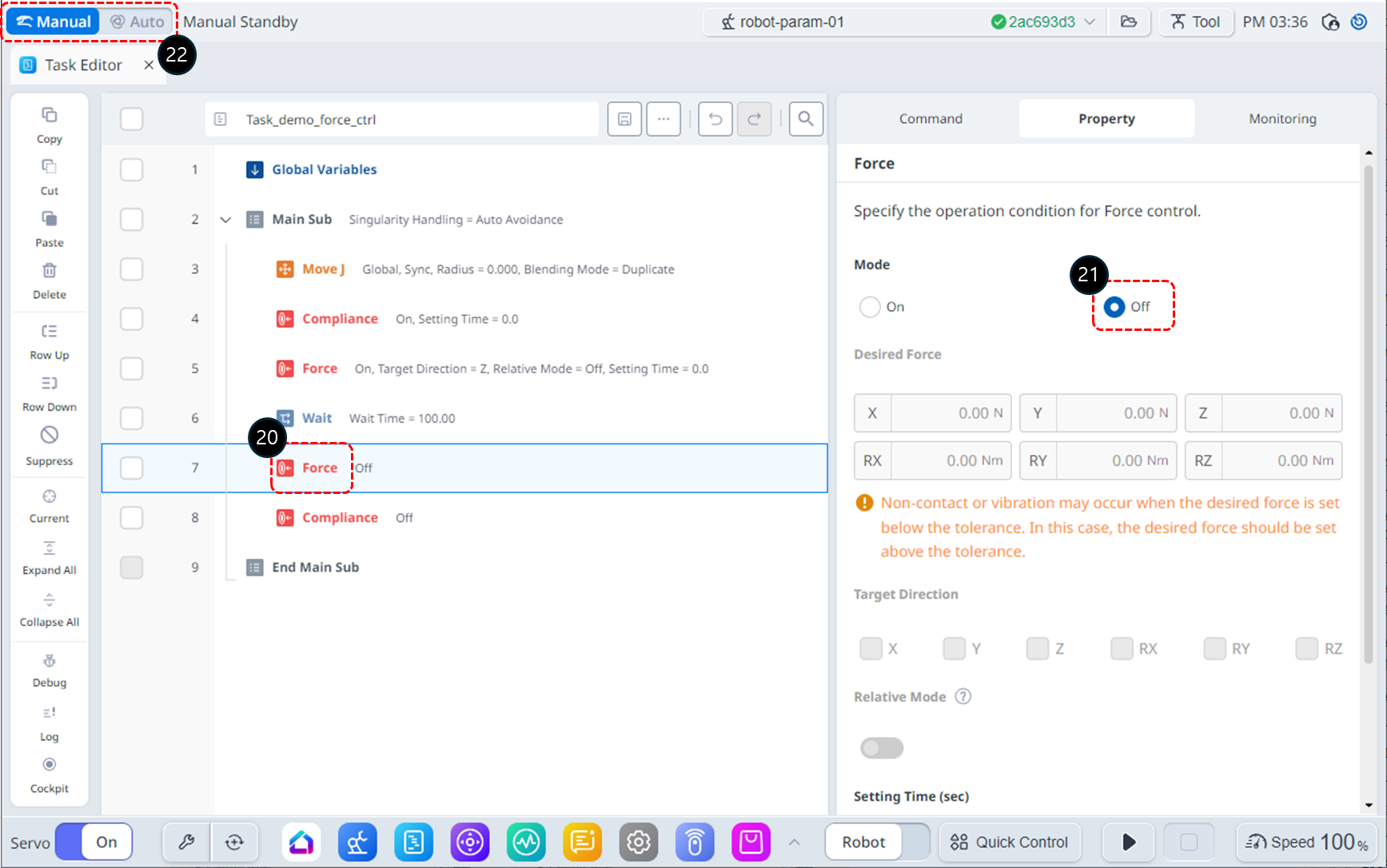
Na Lista de tarefas, selecione o comando Forçar na linha 7.
-
Defina o Modo da seguinte forma: O modo desligado desativa o controle de força.
-
Modo : Desligado
-
-
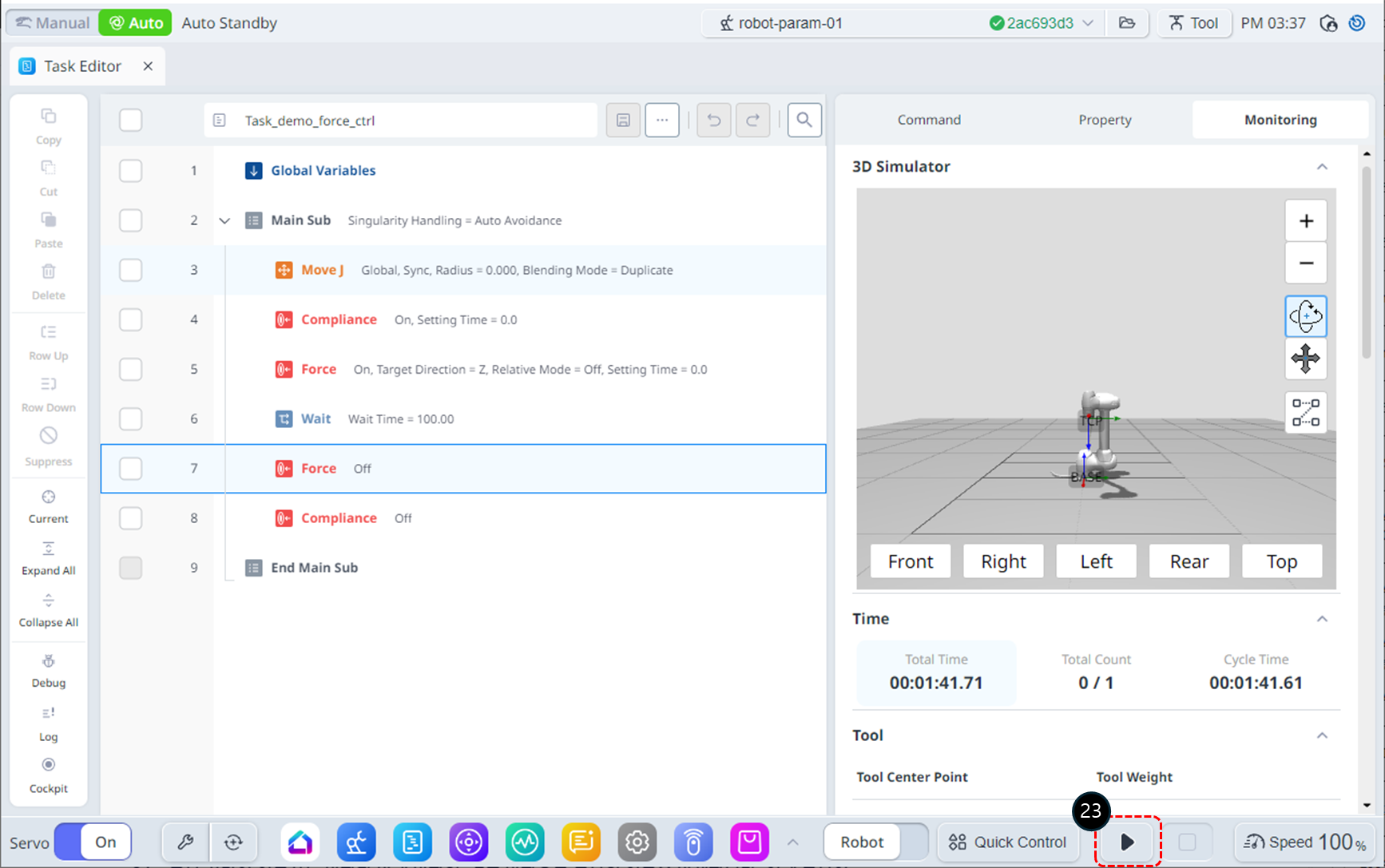
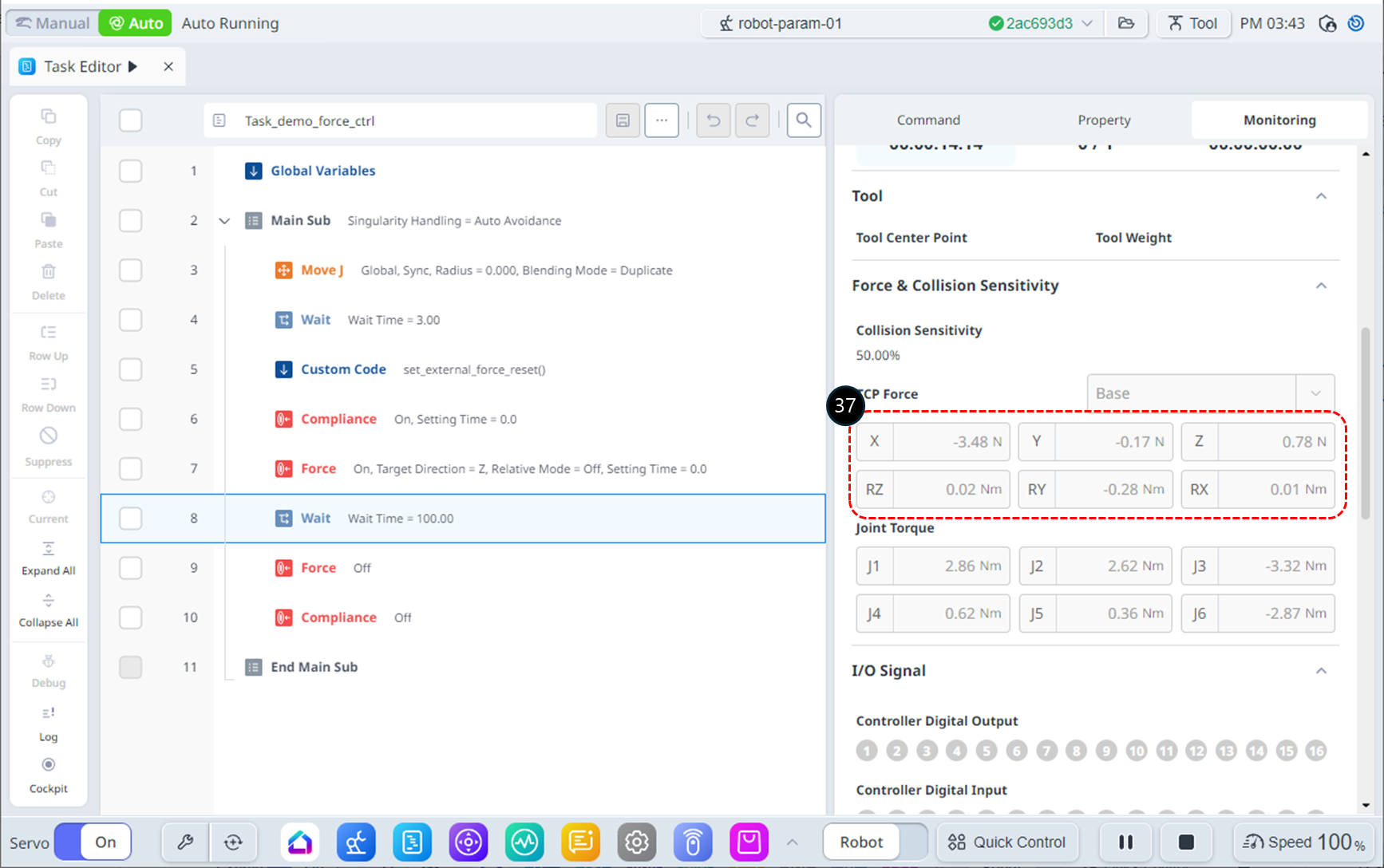
Mude o Modo de operação para Automático. A guia Propriedade mudará automaticamente para a guia Monitoramento.
Unknown Attachment
-
Clique no botão Executar. No estado de espera, o robô opera da seguinte forma:
-
Uma força de -10N é aplicada no efetor final do robô, fazendo com que o robô se mova lentamente na direção -Z.
-
Aplique uma força de compensação na direção Z, oposta ao movimento do robô. Quando a força aplicada pelo robô e a força oposta estiverem equilibradas, o robô parecerá manter sua posição como se estivesse parado.
-
Se uma força maior que 10 N for aplicada ao robô, ele se moverá na direção da força aplicada.
-
-
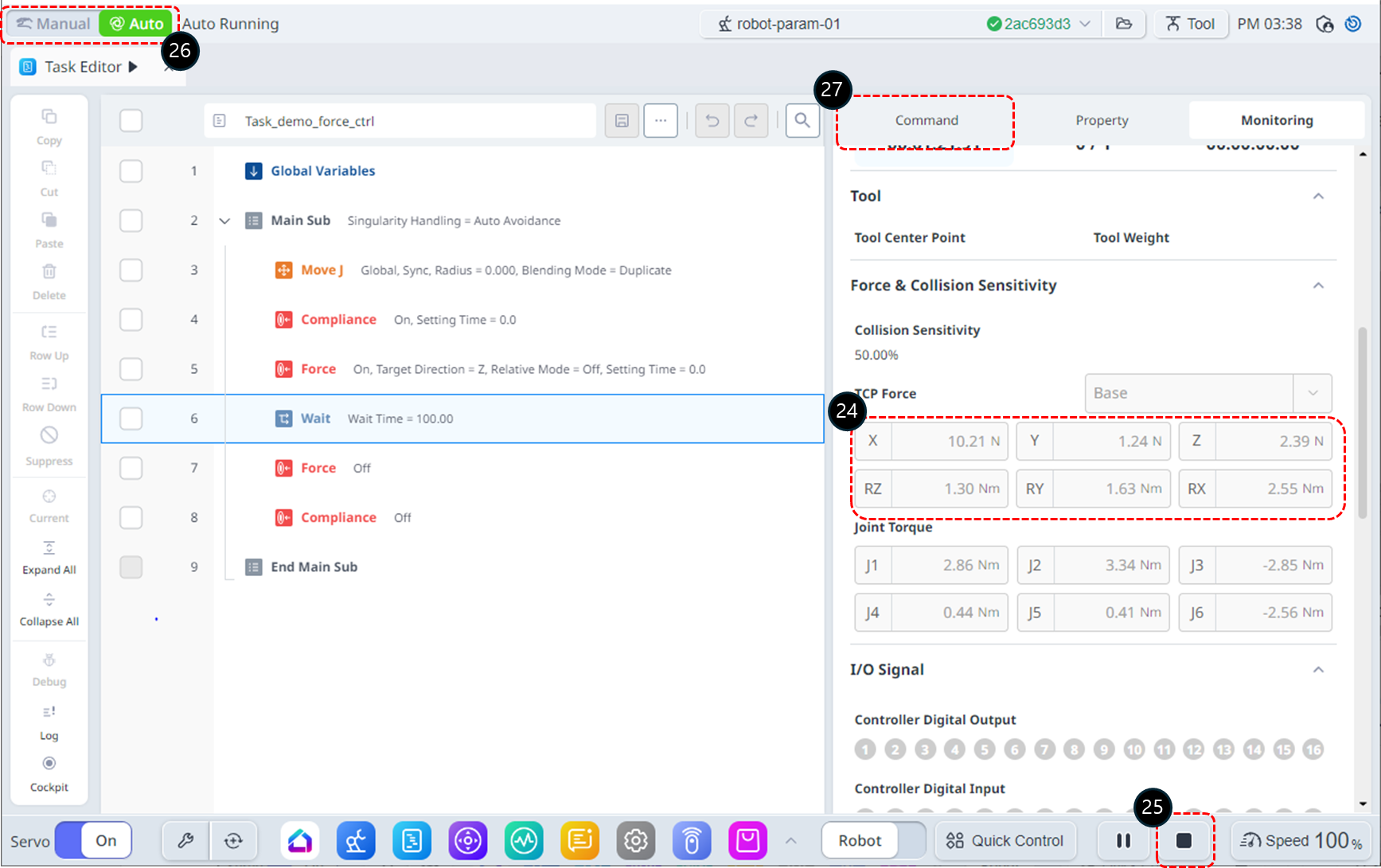
Durante a operação, você pode monitorar a força TCP em tempo real na seção Força TCP da guia Monitoramento. Se nenhuma força for aplicada ao efetor final do robô, os valores de Força TCP devem ser todos 0, mas você pode notar componentes de erro sendo exibidos. Abaixo está uma explicação adicional para resolver esse problema.
-
Clique no botão Parar para encerrar a tarefa.
-
Alterne o Modo de operação para Manual para modificação da tarefa.
-
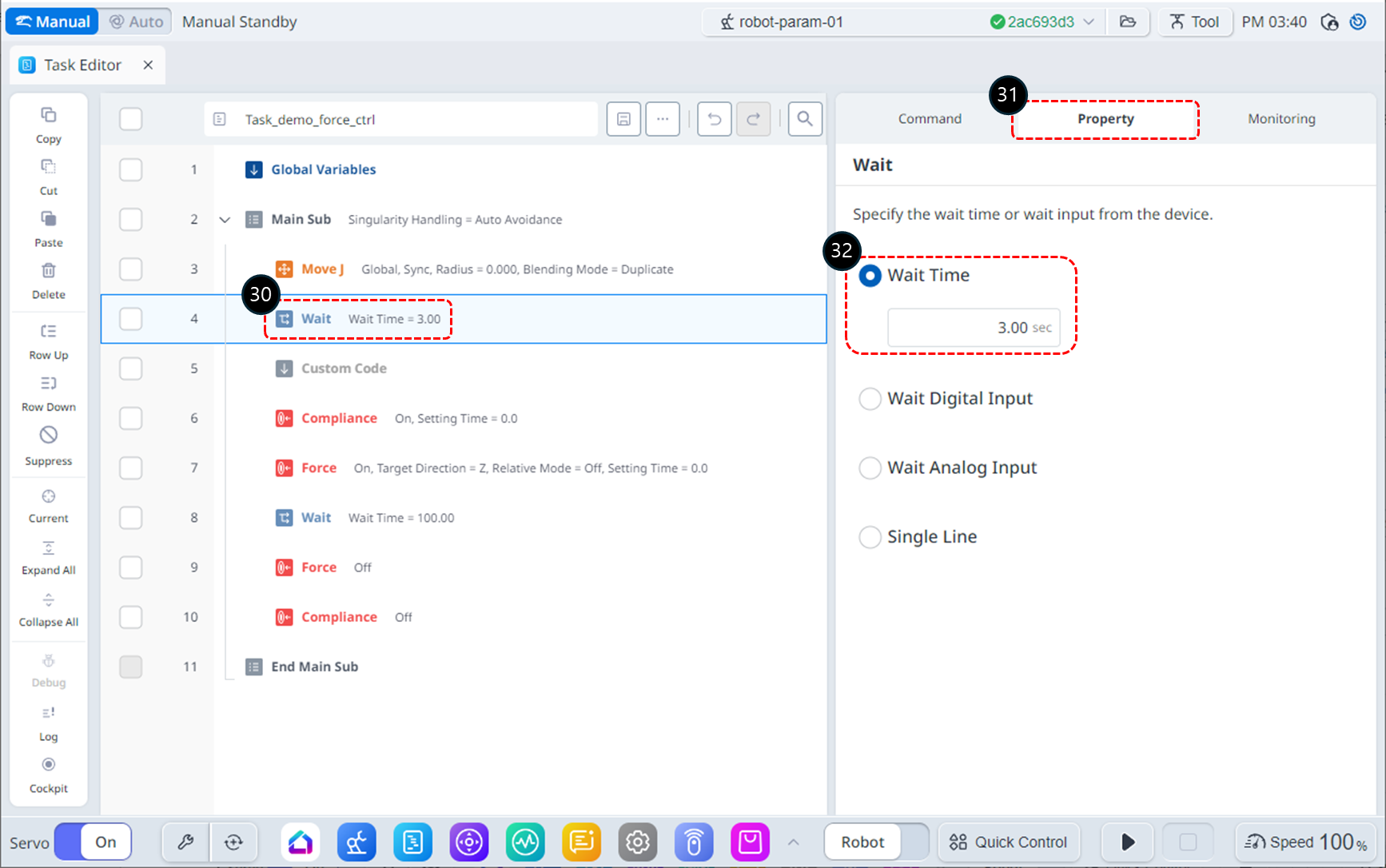
Selecione a guia Comando.
-
Adicione um comando Aguardar à linha 4 da Lista de tarefas.
-
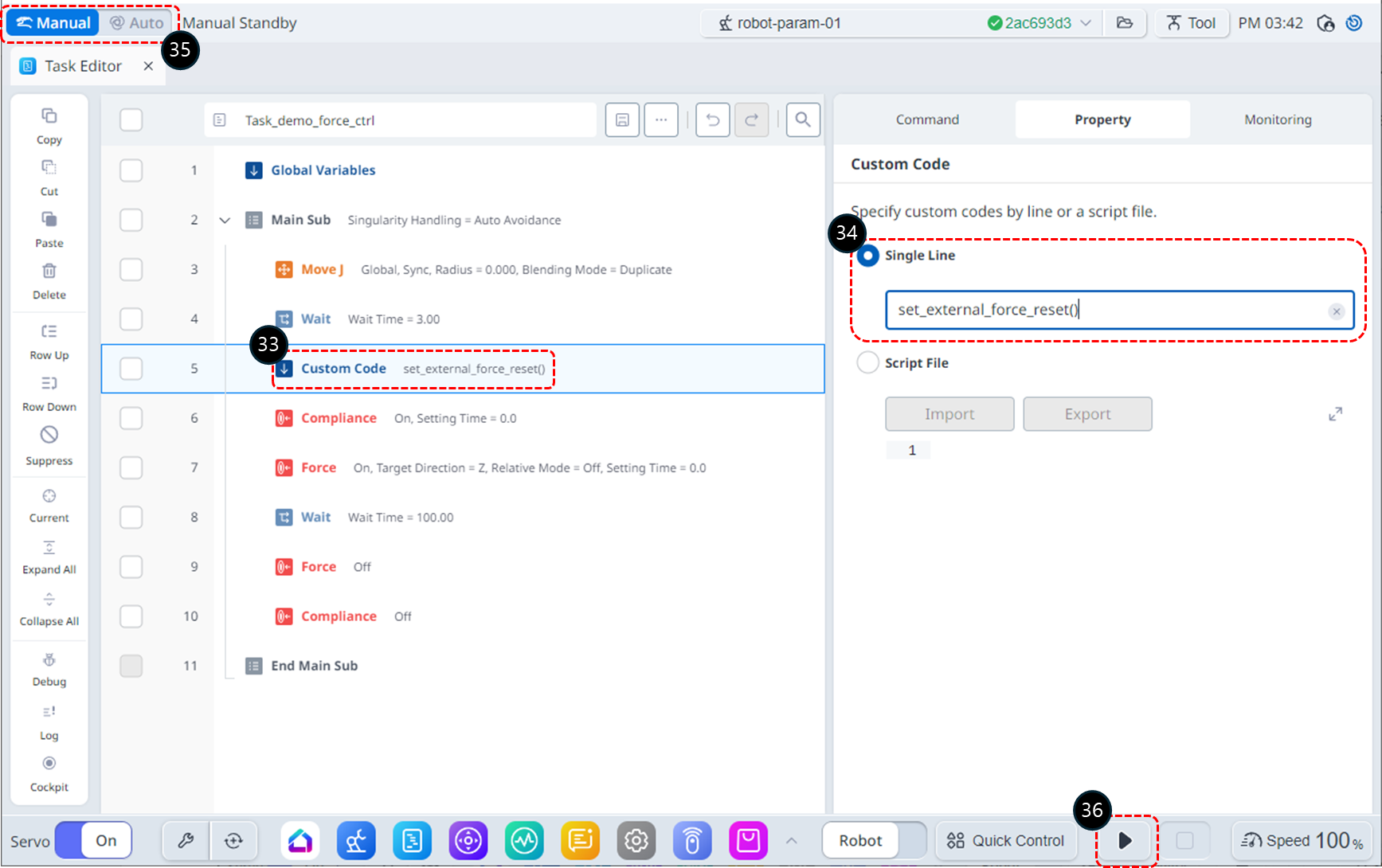
Adicione um comando Código personalizado à linha 5 da Lista de tarefas.
-
Selecione o comando Aguardar na linha 4.
-
Selecione a guia Propriedade.
-
Defina o tempo de espera da seguinte forma.
-
Tempo de espera : 3 seg
-
-
Selecione o comando Código personalizado na linha 5.
-
Escolha Linha única e adicione o seguinte comando DRL: Este comando redefine os valores do sensor de força externo para remover quaisquer erros.
-
a função set_externl_force_reset()
-
-
Mude o Modo de operação para Automático. A guia Propriedade mudará automaticamente para a guia Monitoramento.
-
Clique no botão Executar.
-
Na guia Monitoramento, verifique os valores de Força TCP. Você notará que o erro foi reduzido em comparação com antes de usar o comando set_external_force_reset().