Menu
|
|
Itens |
Descrição |
|---|---|---|
|
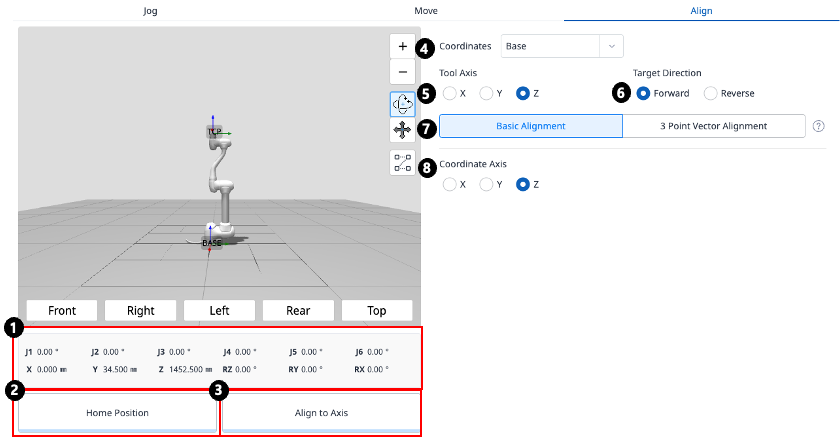
1 |
Postura do robô |
Exibe a postura articular atual do robô e a postura da tarefa.
|
|
2 |
Botão de posição inicial |
Move o robô para a posição inicial quando clicado. |
|
3 |
Botão Alinhar |
Alinha o robô quando clicado. |
|
4 |
Selecione Sistema de coordenadas de referência |
Selecione o sistema de coordenadas de referência para posicionamento. |
|
5 |
Eixo da ferramenta |
Selecione qual eixo do TCP alinhar. |
|
6 |
Direção-alvo |
Selecione a direção com a qual alinhar o TCP. |
|
7 |
Método de alinhamento |
Selecione o método de alinhamento.
|
|
8 |
Eixo das coordenadas |
Selecione com qual eixo do sistema de coordenadas de referência alinhar. |
|
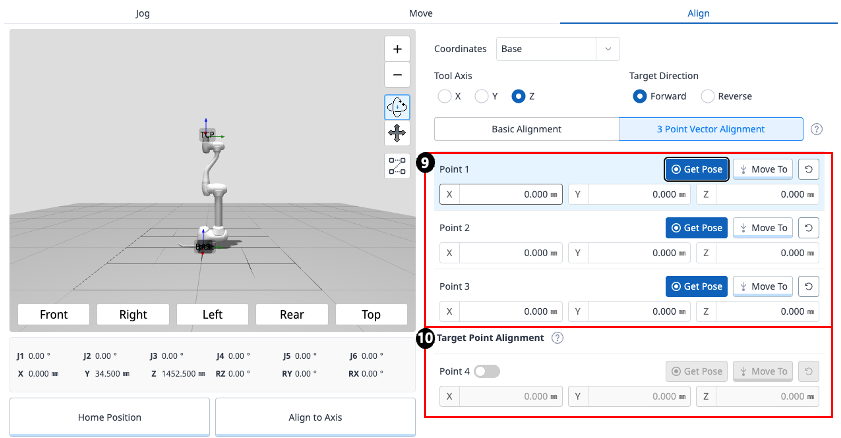
9 |
Selecione pontos em um plano |
Selecione três pontos que definem o plano. 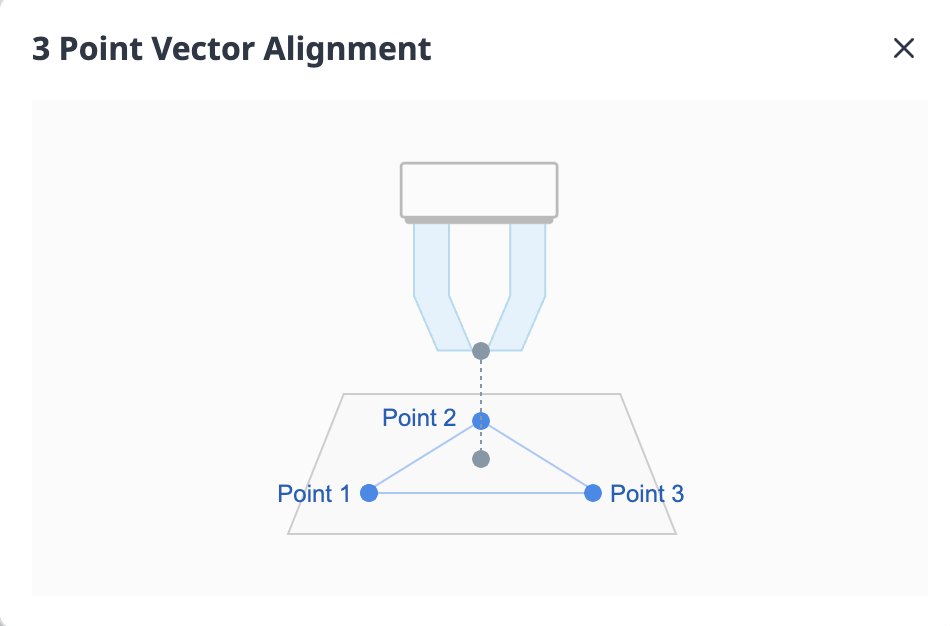
|
|
10 |
Alinhamento do ponto-alvo |
Selecione um ponto para posicionar o TCP.
|