Consertando o robô
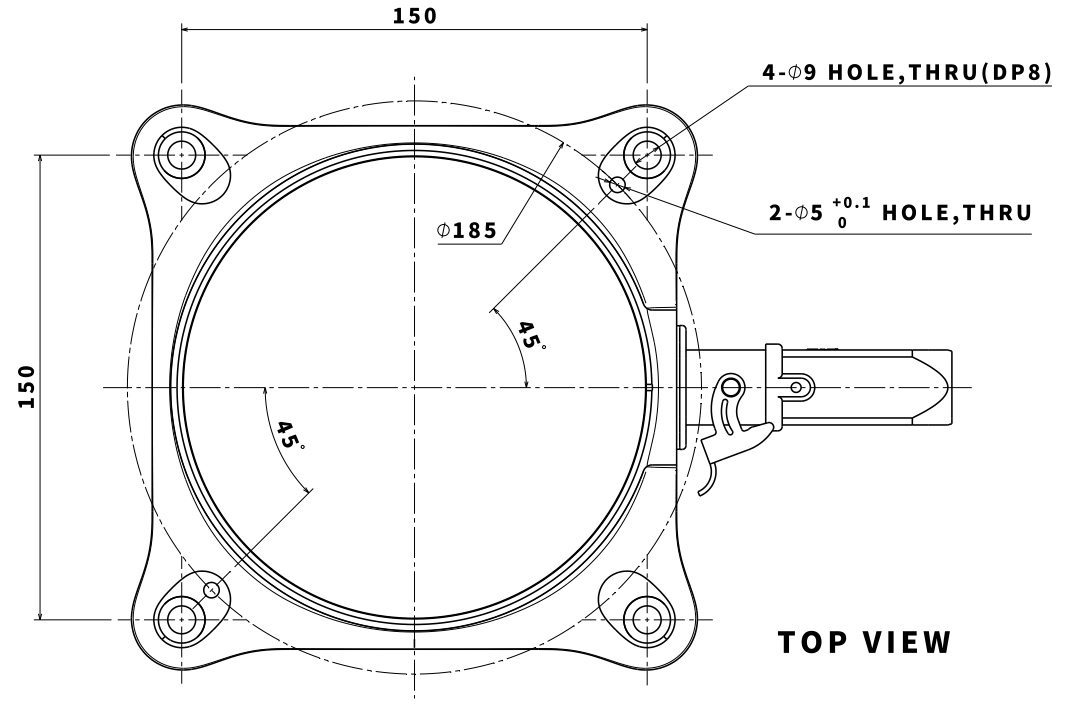
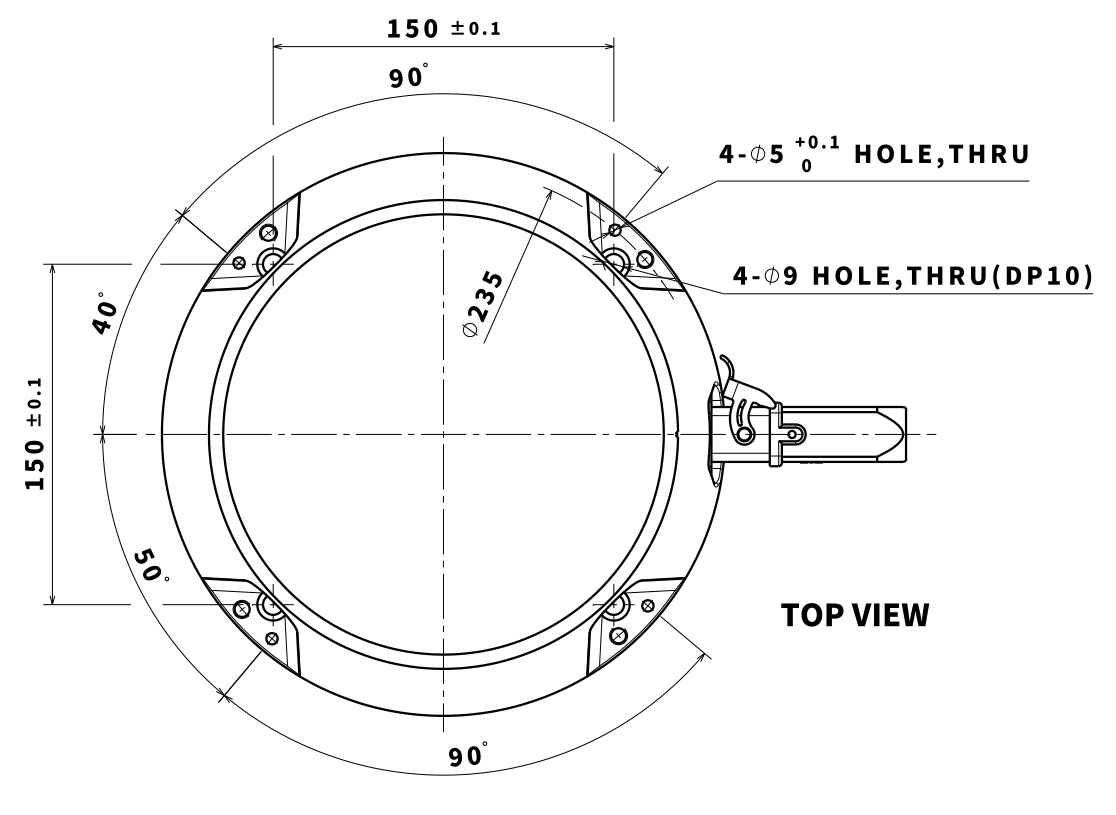
Use parafusos M8 nos quatro orifícios de 9,0 mm na base do manipulador para fixar o robô.
-
Recomenda-se usar um torque de aperto de 20 Nm para apertar os parafusos. Use arruelas (planas por mola) para evitar afrouxar por vibração.
-
Use dois Φ5 pinos marcadores para instalar com precisão o robô em um local fixo.
O desenho da base do manipulador e quatro parafusos M8 são usados (série M). Unidade [mm]
O desenho da base do manipulador e quatro parafusos M8 são usados (série H), unidade [mm]
Aviso
-
Aperte os parafusos totalmente para evitar afrouxar durante a operação do manipulador.
-
Instale a base do manipulador em uma superfície sólida que possa suportar a carga gerada durante a operação (10 vezes o torque máximo e cinco vezes o peso do robô).
-
O robô interpretará a vibração da base do manipulador como uma colisão e acionará a parada de emergência. Portanto, para locais de instalação que mudam de posição automaticamente, não instale a base do robô em um local com alta aceleração de movimento.
-
Monte o braço do manipulador em um local específico usando os métodos apropriados. A superfície de montagem deve ser sólida.
-
O manipulador será danificado se entrar em contato com a água por um longo período de tempo. Não opere o robô em condições em que ele possa ficar molhado ou debaixo d'água.
Colocação do cabo
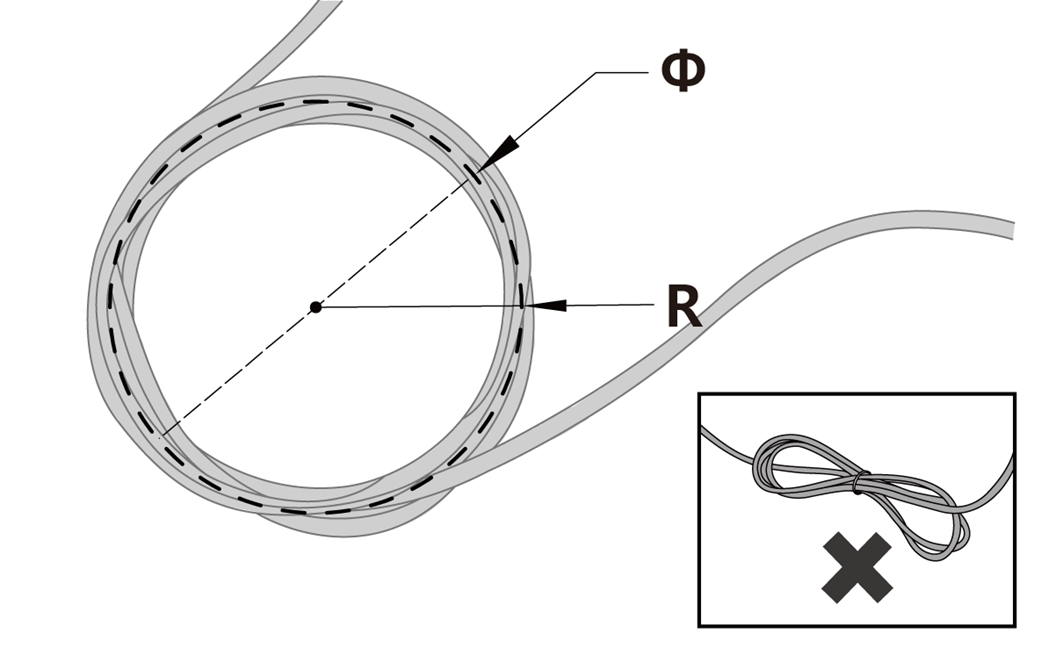
Certifique-se de que os cabos tenham curvaturas maiores que o raio de curvatura mínimo. O raio de curvatura mínimo de cada cabo é o seguinte:
|
Cabo |
Raio de curvatura mínimo (R) |
|---|---|
|
Ensine o cabo do pendente |
120 mm |
|
Cabo do robô |
120 mm |
Cuidado
-
Certifique-se de que o raio de curvatura entre o cabo do pendente de instrução e o conector do pendente de instrução seja maior que o raio de curvatura mínimo.
-
Se o raio de curvatura for menor que o raio de curvatura mínimo, poderá ocorrer desconexão do cabo ou danos ao produto.
-
Em ambientes onde pode ocorrer ruído eletromagnético, a instalação adequada do cabo deve ser tomada para evitar mau funcionamento.