Configuração de limites do robô
Em Limites do robô, vários limites relacionados ao robô podem ser definidos. Esses limites são usados para garantir que o robô opere com segurança dentro dos limites definidos.
Os limites do robô podem ser definidos em Parâmetro do robô > Configurações de segurança > Limites do robô.
-
Para obter uma descrição detalhada de cada limite, consulte Limites do robô.
Os limites do robô são amplamente divididos em 3 categorias. Cada categoria inclui as seguintes telas e funções.
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
TCP/Robô |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
Força |
Usado para definir a força. |
|
5 |
Potência |
Usado para definir a energia. |
|
6 |
Velocidade |
Usado para definir a velocidade. |
|
7 |
Impulso |
Usado para definir o momento. |
|
8 |
Colisão |
Usado para definir a colisão. |
|
9 |
Salvar |
Usado para salvar a configuração aplicável. |
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Velocidade da junta |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
J1 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
5 |
J2 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
6 |
J3 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
7 |
J4 (inativo para modelos da série P) |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
8 |
J5 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
9 |
J6 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
10 |
Salvar |
Usado para salvar a configuração aplicável. |
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Ângulo da junta |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
J1 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
5 |
J2 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
6 |
J3 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
7 |
J4 (inativo para modelos da série P) |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
8 |
J5 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
9 |
J6 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
10 |
Salvar |
Usado para salvar a configuração aplicável. |
E/S de segurança
Essa função é usada para entrada/saída de sinais relacionados à segurança para os terminais redundantes. Se algum dos sinais de entrada/saída de segurança for detectado como tendo um sinal redundante diferente, ele determinará um circuito aberto ou falha de hardware e interromperá o robô no modo de parada STO.
-
Para definir a E/S de segurança, selecione Parâmetros do robô > Configurações de segurança > E/S de segurança.
Para obter mais informações, consulte E/S de sinal de segurança .
Entrada
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Entrada/Saída |
Qualquer Entrada/Saída pode ser selecionada para ser definida. |
|
3 |
Configuração do sinal |
Opções definidas para cada porta.
Não usado
|
|
4 |
Selecione se deseja ignorar o sinal dependendo do estado do robô |
Se você selecionar o sinal "Protective Stop" (Parada de proteção), poderá definir se o sinal selecionado será ignorado nos estados do robô "MANUAL, RECUPERAÇÃO, HGC". |
|
5 |
Defina a taxa de desaceleração |
Você pode definir a taxa de desaceleração. Pode ser de 0 a 100. |
|
6 |
Salvar |
Este botão permite salvar a configuração inserida. |
Saída
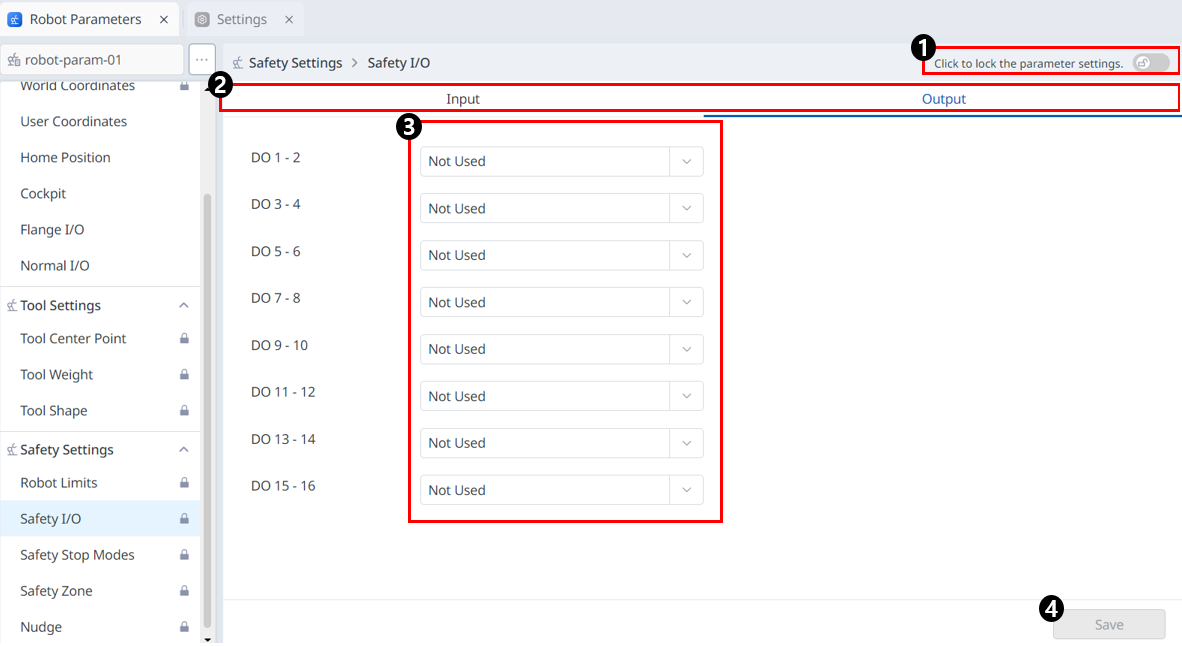
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Entrada/Saída |
Qualquer Entrada/Saída pode ser selecionada para ser definida. |
|
3 |
Configuração do sinal |
Opções definidas para cada porta.
Não usado
|
|
4 |
Salvar |
Este botão permite salvar a configuração inserida. |
Configurações dos modos de parada de segurança
Aprenda os tipos de paradas de segurança e como engatar/desengatar a parada de segurança.
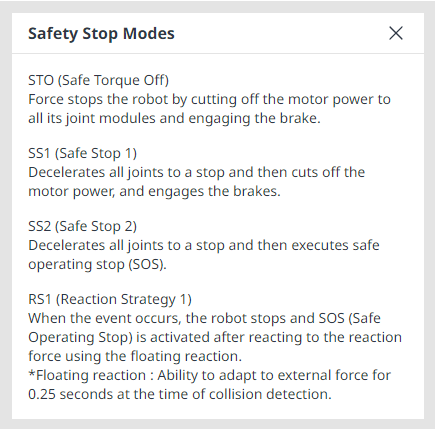
Tipos de paradas de segurança
Os modos de parada fornecidos para garantir a segurança do usuário são os seguintes:
-
STO (torque seguro desligado): Interrompe o Servo desligado (a energia do motor é desligada imediatamente)
-
SS1 (Parada segura 1): Servo desligado após parada de desaceleração máxima
-
SS2 (Parada segura 2): Espera após parada de desaceleração máxima (pausa)
-
RS1: Em caso de colisão, está em conformidade com a direção oposta da colisão e, em seguida, entra em espera (só pode ser definido em Detecção de colisão/Violação de limite de força TCP)
Os robôs Doosan Robotics têm dois tipos de funções de parada de segurança. A Parada de Emergência é usada para situações gerais de emergência, e o robô pode retomar a operação com o Servo ligado depois de liberar a parada de emergência. Em caso de parada de proteção, o robô pode retomar a operação resolvendo a causa da parada de proteção e soltando a parada.
-
Parada de emergência: Ele define o modo de parada quando o botão Parada de emergência do pendente de instrução ou um dispositivo externo instalado adicionalmente é ativado
-
Ela é ativada quando o interruptor de Parada de Emergência do pendente de instrução ou aquele conectado ao terminal EM da TBSFT é pressionado.
-
Somente STO ou SS1 pode ser selecionado.
-
-
Parada de proteção: Define o modo de parada quando o equipamento de proteção conectado externamente é ativado
-
Ele é ativado quando o equipamento de proteção conectado ao terminal TBSFT PR é ativado.
-
Para obter mais informações sobre as funções de Parada de Segurança, consulte Funções de Segurança.
Como engatar/desengatar a parada de segurança
Pressione o botão Parada de emergência no pendente de instrução ou ative o dispositivo de segurança conectado à E/S de segurança para ativar a parada de emergência. Os dispositivos de segurança podem ser conectados à Parada de emergência ou à Parada de proteção por meio de Parâmetros do robô > Configurações de segurança > Funções de E/S de segurança da tela do pendente de instrução.
-
Para obter mais informações sobre como conectar um dispositivo de segurança à E/S de segurança, consulte Conectar E/S do Controlador.
-
Para obter informações sobre como definir a função de parada de segurança para essa conexão no programa, consulte E/S de sinal de segurança.
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Mensagem informativa |
Uma mensagem fornecendo as informações necessárias para a configuração. |
|
3 |
Redefinir |
Um botão para redefinir as configurações. |
|
4 |
Parada de emergência |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 |
|
5 |
Batente de proteção |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: SS1 SS2 |
|
6 |
Violação do limite do ângulo da articulação |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 SS2 |
|
7 |
Violação do limite de velocidade da articulação |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
8 |
Violação do limite de torque da junta |
Somente STO está disponível. |
|
9 |
Detecção de colisão |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 RS1 |
|
10 |
Violação do limite de posição do robô TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 SS2 |
|
11 |
Violação do limite de orientação TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
12 |
Violação do limite de velocidade TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. O menu suspenso inclui o seguinte: STO (exceto para a série H/P) SS1 SS2 |
|
13 |
Violação do limite de força TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
14 |
Violação do limite de momentum |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
15 |
Violação do limite mecânico |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
16 |
Salvar |
Este botão permite salvar os valores de configuração. |
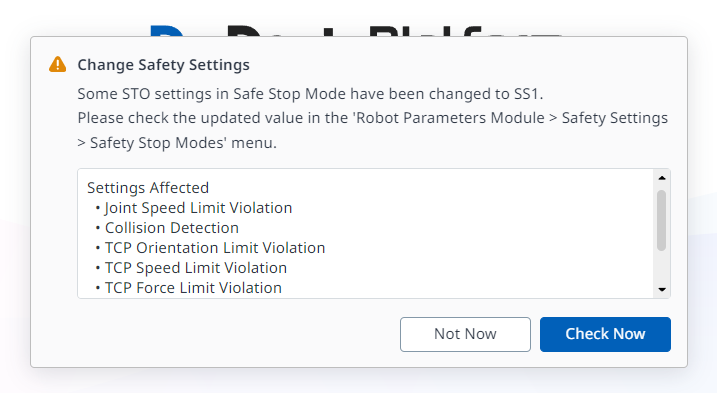
Observação
A seguinte janela pop-up aparece na mensagem informativa:
Observação
A partir da versão 3,2.2, algumas configurações de STO nos modos de Parada de Segurança do modelo H foram alteradas para SS1.
Se os valores em uso tiverem sido atualizados, o pop-up a seguir será exibido.