Ligue o controlador
OBRIGATÓRIO FÁCIL 1 MIN
-
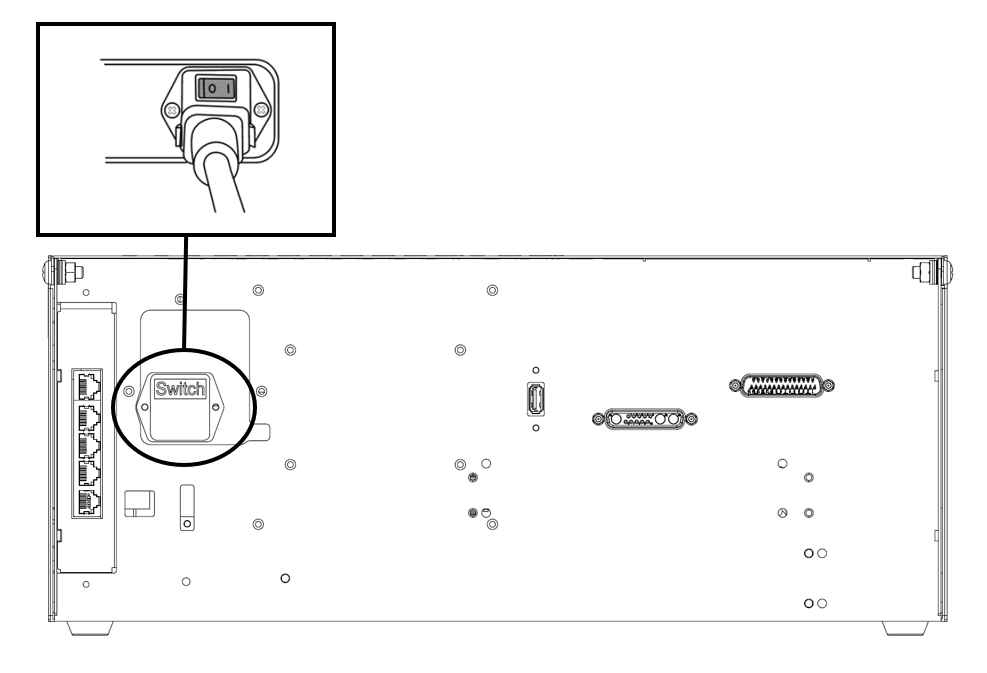
Pressione o botão liga/desliga na parte inferior do controlador. A energia para sistemas como o robô, o controlador e o pendente de instrução está ligada.
-
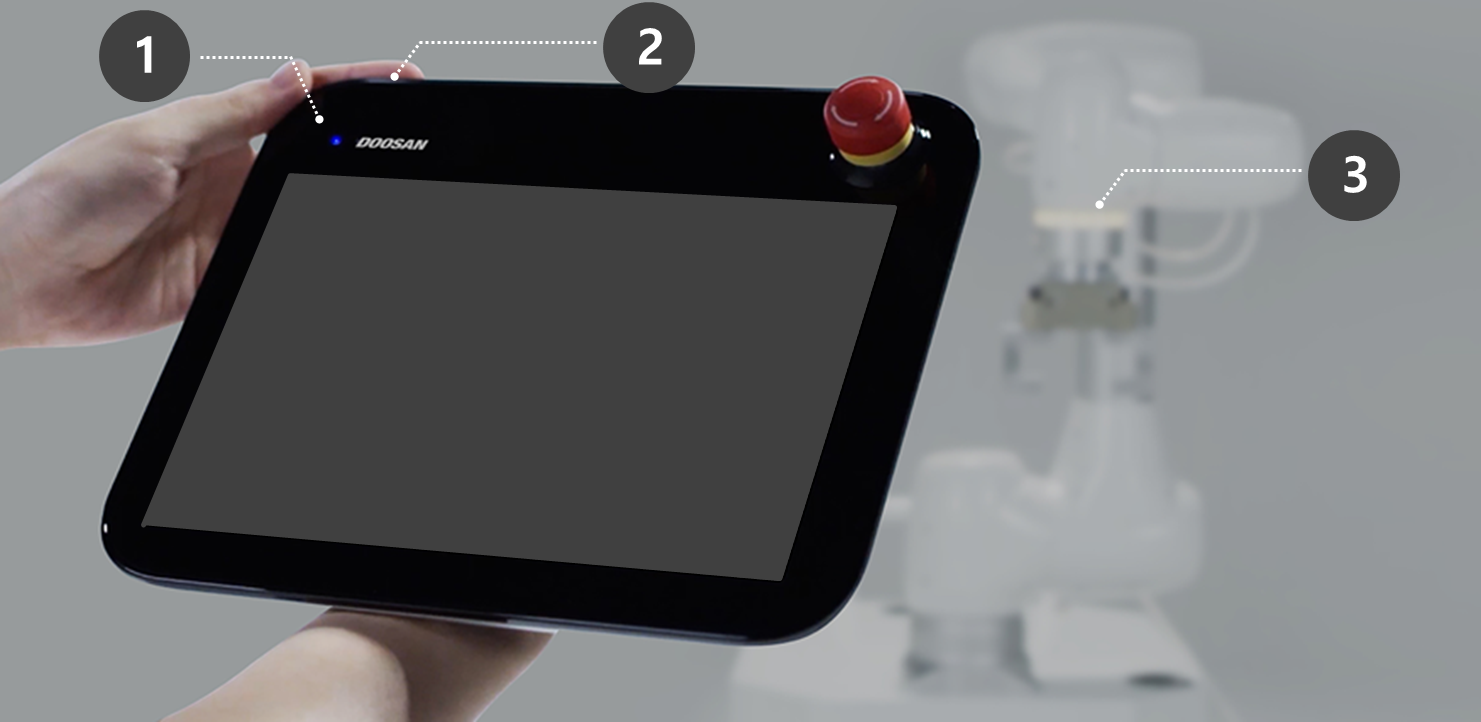
Pressione e segure o botão liga/desliga (Fig. 2) até que a tela do pendente de instrução ligue. O LED do pendente de instrução (Fig. 1) e o LED do flange (Fig. 3) piscarão em vermelho até que o controlador do robô se conecte à rede.
ㅤ
ㅤ
-
Para obter mais informações sobre equipamentos que não sejam o pendente de instrução, consulte Ligar/Desligar Sistema.
Observação
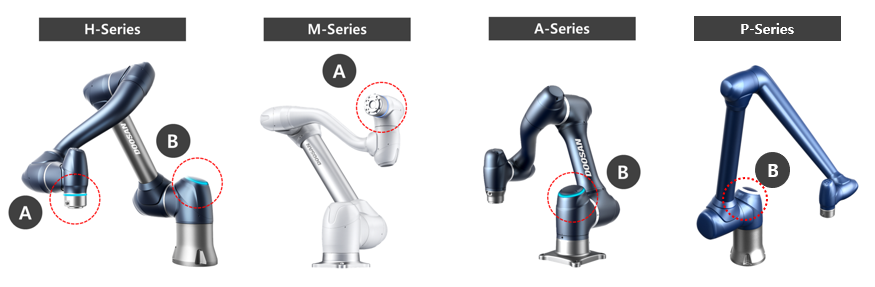
As posições de LED de cada série de robôs Doosan Robotics são as seguintes:
-
A: LED do flange
-
B: LED AXIS 1
Desengate o botão de parada de emergência
OBRIGATÓRIO FÁCIL 1 MIN
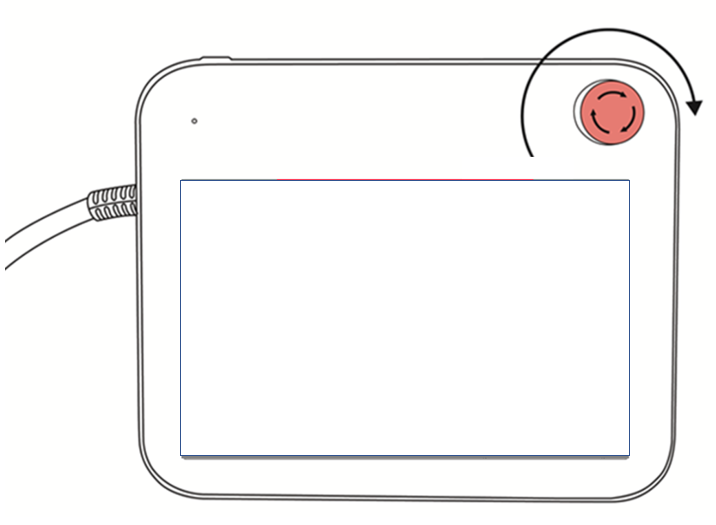
Após a instalação do robô e após a inicialização inicial do sistema, um pop-up de aviso é exibido quando o botão de parada de emergência do pendente de instrução é pressionado. O botão de parada de emergência deve ser desengatado para operar o robô.
-
Gire o botão de parada de emergência no sentido horário para desengatar o estado de parada de emergência.
Desengate a postura da embalagem
OBRIGATÓRIO FÁCIL 3 min
O robô está em sua posição de embalagem para permitir fácil transporte ou embalagem. Para usar o robô, é necessário desengatar a postura da embalagem. Como o robô mantém uma posição que excede o limite do ângulo da junta quando na posição de embalagem, é impossível definir o status Servo ligado devido à violação do limite de segurança. O LED do robô acende em vermelho nesse estado.
Observação
Se houver um caso em que você precise embalar o robô devido à realocação, defina a posição da embalagem usando Mover com a pose da embalagem no modo de embalagem.
Unknown Attachment
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Nome do modelo |
O nome do modelo do robô conectado é exibido. |
|
2 |
Embalar/desembalar |
Pack ou Unpack pode ser selecionado. |
|
3 |
Limite de postura/articulação da embalagem |
Os valores de limite de pose e articulação são exibidos. |
|
4 |
Relação de velocidade |
A velocidade do modo embalar ou desembalar pode ser ajustada através de um controle deslizante ou entrada. |
O processo de configuração da postura da embalagem é o seguinte:
-
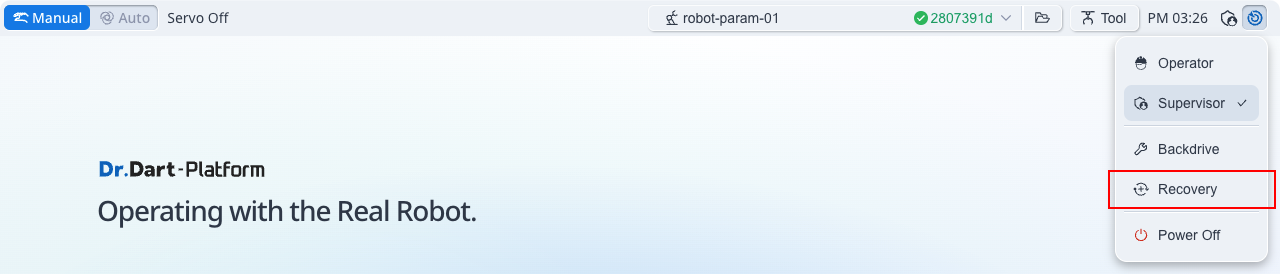
Toque no menu Recuperação no painel de cabeçalho.
-
Selecione a guia Modo de embalagem.

-
Toque no botão Servo On to Start Recovery para ativar o modo de embalagem.

-
O robô se move automaticamente para a posição de embalagem definida.
-
O botão Pack permite que você coloque o robô na posição Pack e o botão Unpack permite que você coloque o robô na posição Home padrão.
-
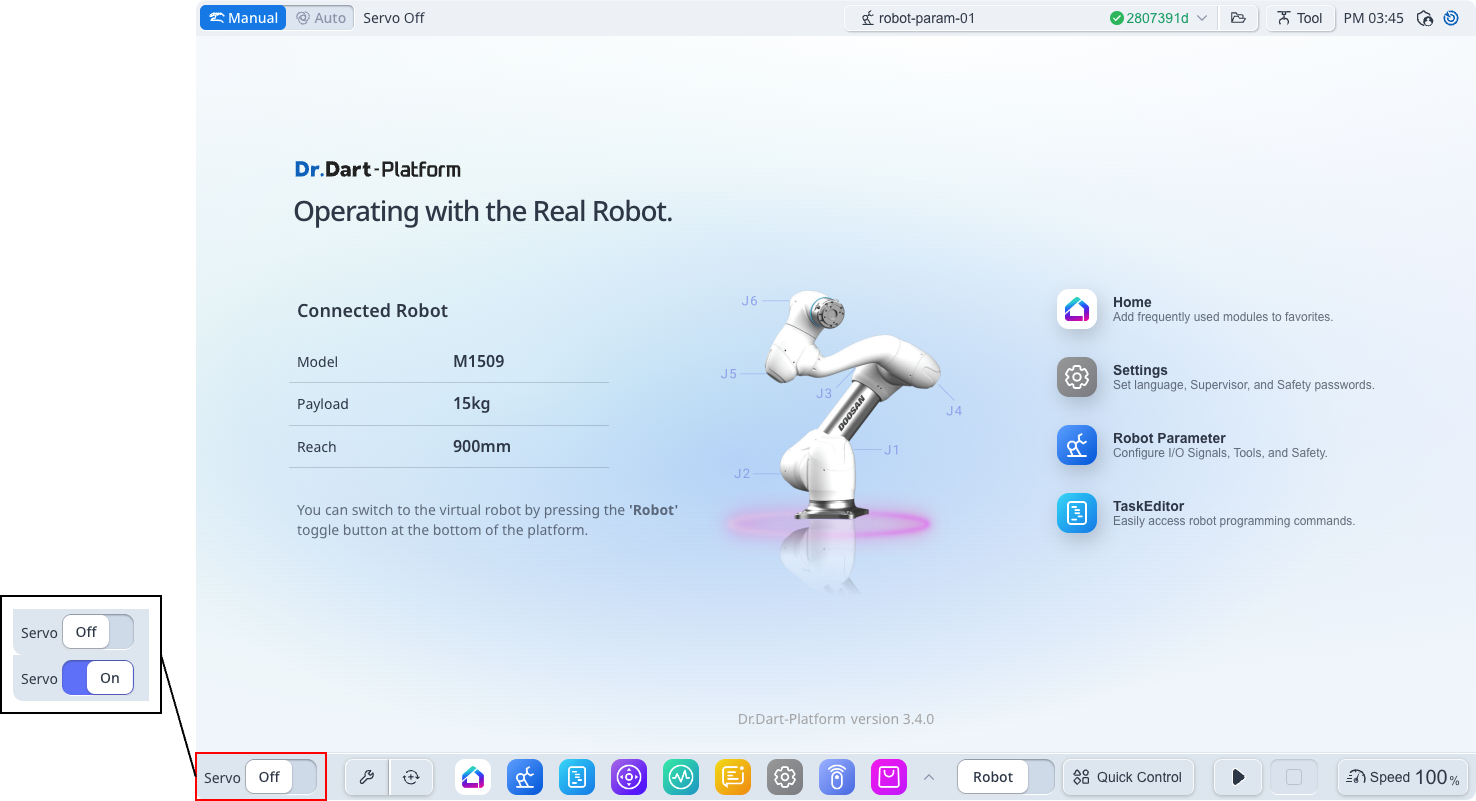
Servo desligado
OBRIGATÓRIO FÁCIL 1 MIN
O status servo ligado é o status em que o robô está pronto com energia fornecida às juntas do robô para modificar a posição do robô.
Pressione o botão Servo Off (Servo desligado) para cortar a energia fornecida às juntas do robô e parar o robô. Para obter mais informações, consulte Visão geral do Servo ligado.