この機能は、冗長端子を介して安全関連信号を入出力します。冗長安全入力または出力信号と異なる信号が検出された場合、システムはそれが短絡またはハードウェアの欠陥であるかどうかを判断し、 STO 停止モードでロボットを停止します。
-
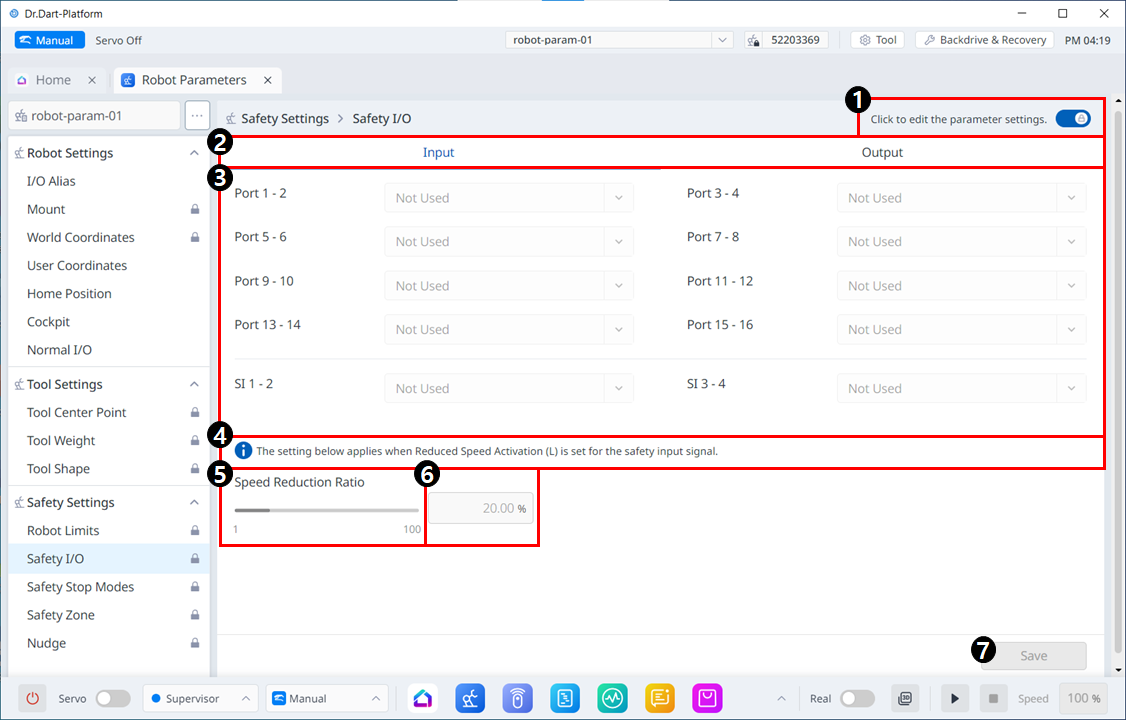
安全信号I/O)は 、Robot Parameters > Safety Settings > Safety I/Oで設定できます。
詳細については、 「安全信号I/O」を参照してください。
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
入力/出力 |
入力/出力のいずれかを選択して設定できます。 |
|
3 |
ポートリスト |
これは、対応するカテゴリのポートのリストです。 ドロップダウンメニューには次のものがあります。 未使用
|
|
4 |
警告メッセージ |
安全I/Oの設定に関する注意事項。 |
|
5 |
速度減速率スライダー |
スライダを使用して、減速比を設定できます。 |
|
6 |
速度低減率入力 |
速度減速率は直接入力できます。0 ~ 100%の範囲で設定できます。 |
|
7 |
保存 |
このボタンを使用すると、入力した設定を保存できます。 |
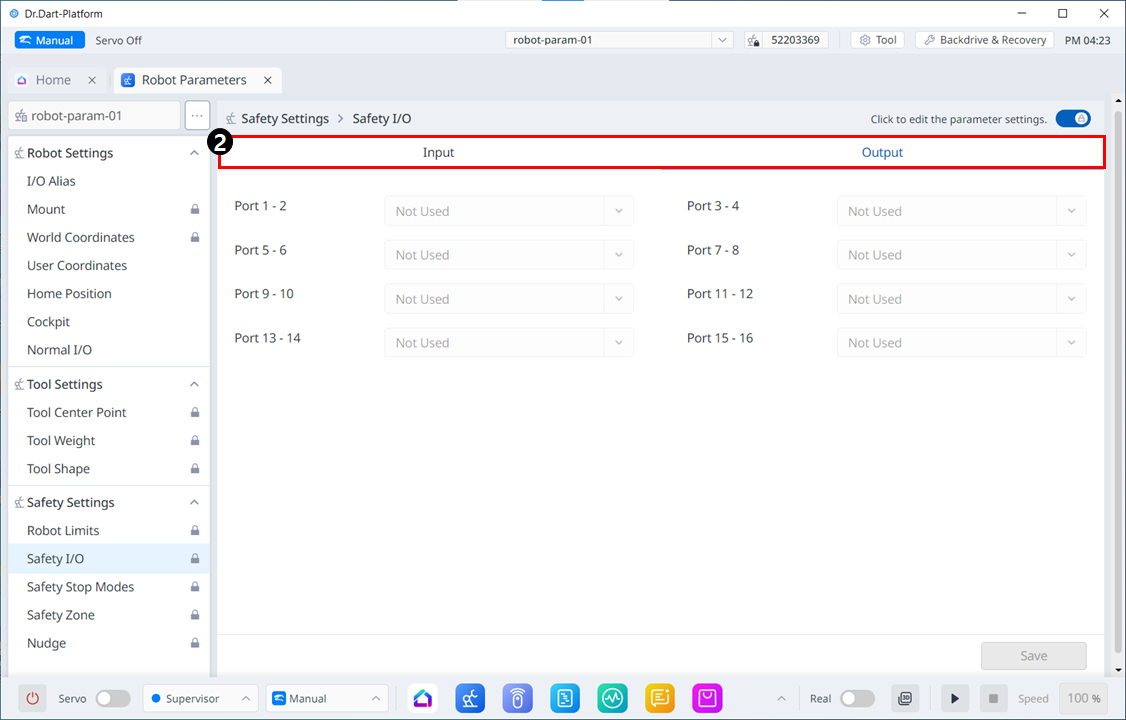
[出力]画面は、入力と同様に次のように表示されます。