ナッジ設定
安全停止モード SS2 または RS1のためにロボットがコラボレーションゾーンで停止した場合、 中断状態ではリセットは使用できませんが、ナッジ入力で作業を再開できます
-
ナッジを設定するには、 ロボットワークセルからロボット>項目をナッジ(Robot > Nudge item)を選択します。
詳細については 、「ナッジ」を参照してください。
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
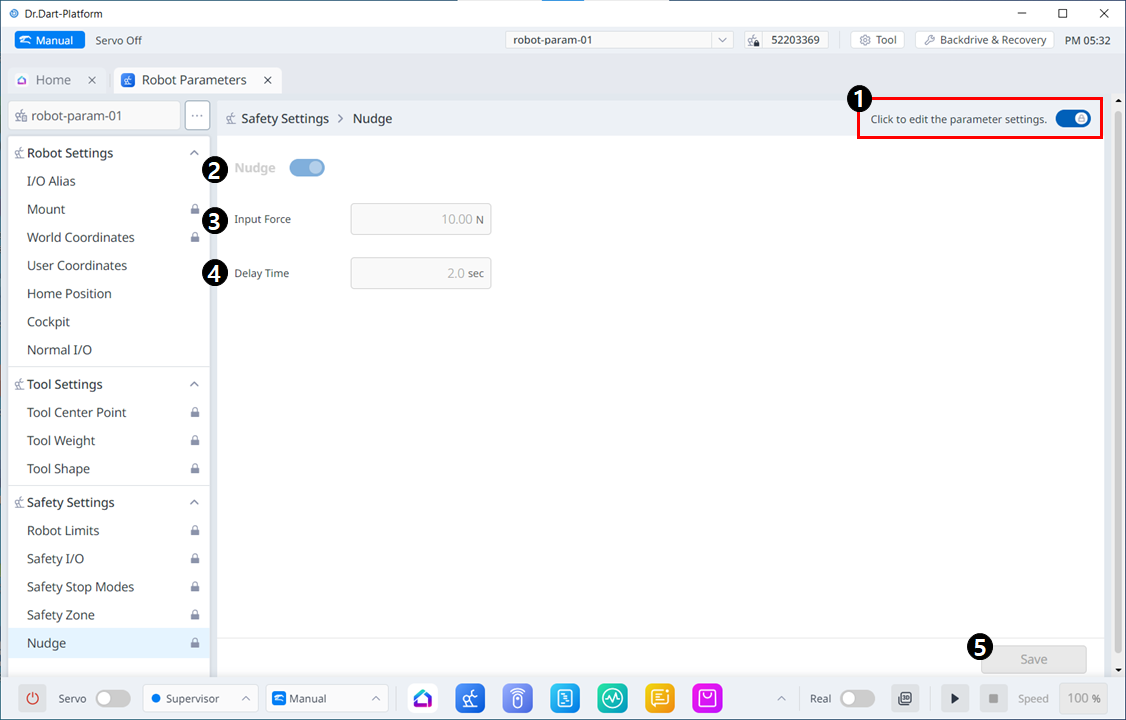
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
ナッジを使用するかどうか |
このボタンでは、ナッジを使用するかどうかを選択できます。 |
|
3 |
強制入力 |
このフィールドには、必要な力の値を入力します。 |
|
4 |
遅延時間 |
このフィールドでは、遅延時間が設定されます。 |
|
5 |
保存 |
このボタンを使用すると、設定した値を保存できます。 |