メニューレイアウトの移動
|
|
アイテム |
説明 |
|---|---|---|
|
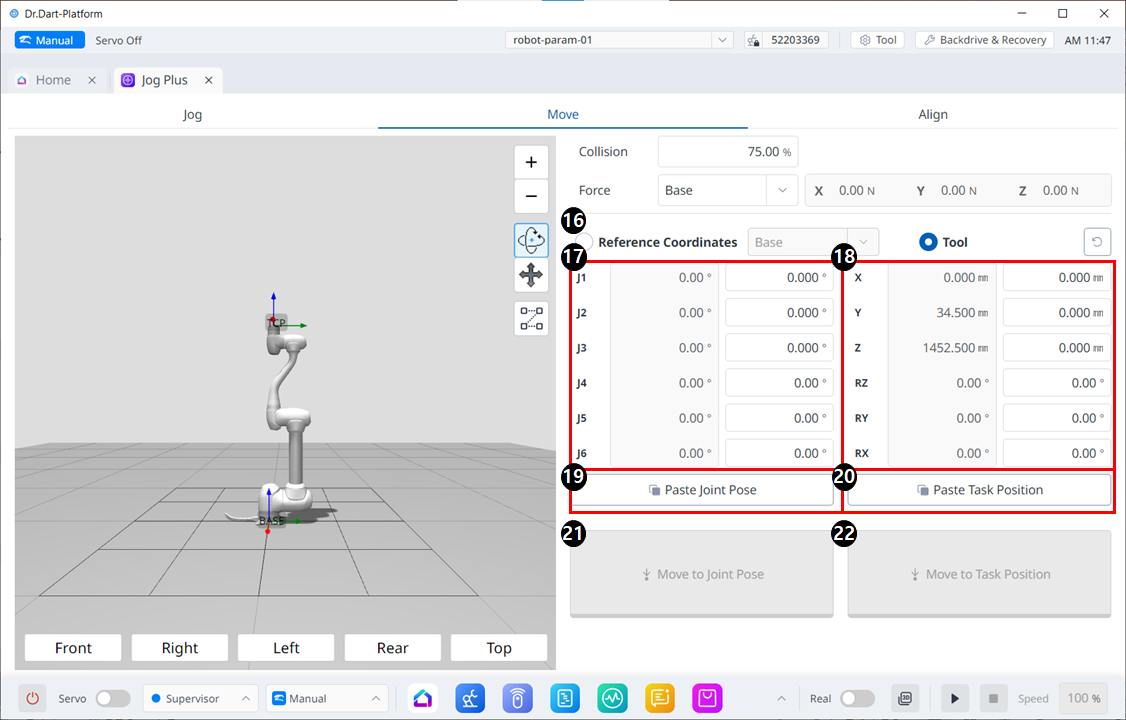
16 |
Reference Coordinates |
図 18 で、タスク座標に使用する参照座標系を選択します。ベース、ワールド、またはユーザー座標を選択できます。 |
|
17 |
Joint Posture |
ロボットの現在の姿勢と目標関節姿勢を表示します。 |
|
18 |
Task Posture |
選択した基準座標系に適合するロボットの現在の姿勢と目標タスクの姿勢を表示します。 |
|
19 |
Paste Joint Posture |
クリップボードにコピーした姿勢値を関節姿勢パネルに貼り付けます。 |
|
20 |
Paste Task Posture |
クリップボードにコピーした姿勢値をタスク姿勢パネルに貼り付けます。 |
|
21 |
Joint Move button |
ロボットを目標関節姿勢へ移動させるボタンです。 |
|
22 |
Task Move button |
このボタンにより、ロボットは目標の作業姿勢に移動します。 |