必須 簡単 3分
ロボットは、輸送や梱包を容易にするために、梱包姿勢になっています。ロボットを使用するには、包装ポーズを解除する必要があります。ロボットがパッケージポーズでジョイント角度制限を超えるポーズを維持しているため、安全制限違反のため、サーボをオンに設定することはできません。この状態では、ロボットLEDが赤色に点灯します。
移動のためにロボットをパッケージ化する必要がある場合は、パッケージモードでパッケージ化ポーズで移動を使用してパッケージポーズを設定します。
パッケージポーズをリリースするプロセスは、次のとおりです。
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
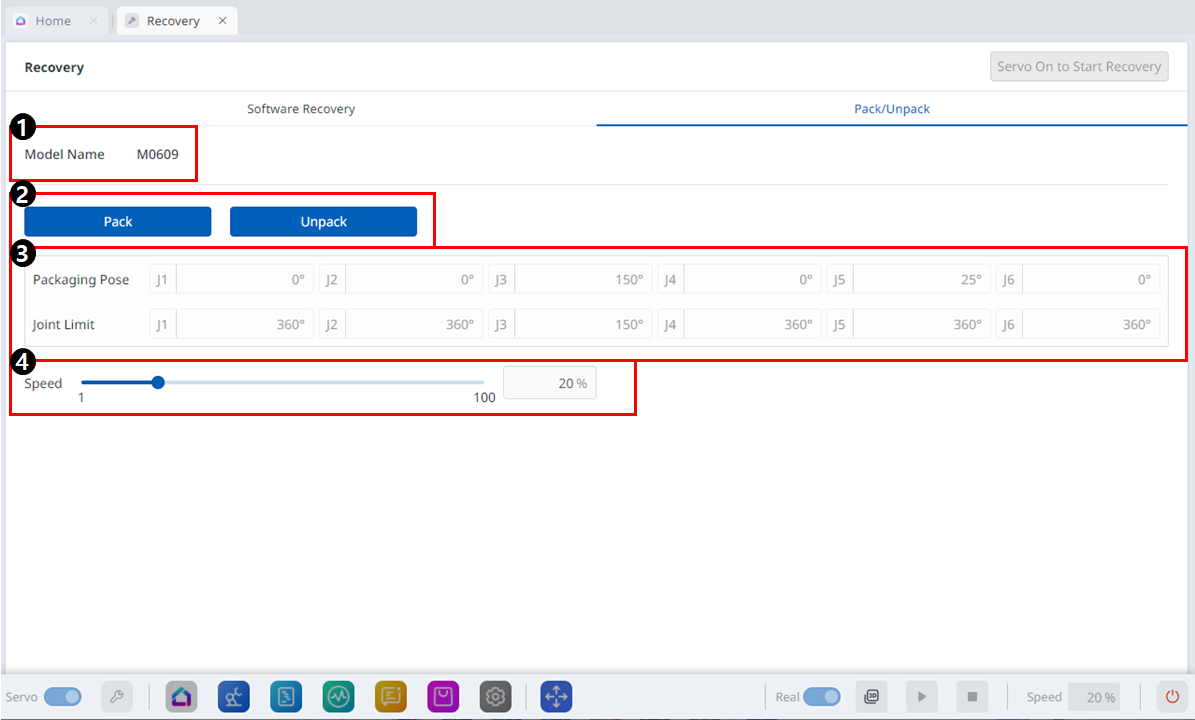
1 |
モデル名 |
接続されたロボットモデルの名前が表示されます。 |
|
2 |
パック/アンパック |
パックまたはアンパックのいずれかを選択できます。 |
|
3 |
パッケージングポーズ/ジョイント制限 |
ポーズとジョイントの制限値が表示されます。 |
|
4 |
速度比 |
パックモードまたはアンパックモードの速度は、スライダまたは入力で調整できます。 |
パッケージモードを設定するには、次の手順を実行します。
-
ヘッダー ペインの回復メニューをタップします。

-
Packaging Mode タブを選択します。

-
[Servo On to Start Recovery]ボタンをタップして、パッケージングモードを有効にします。

-
ロボットは、設定されたパッケージングポーズに自動的に移動します。[パック(Pack )]ボタンを使用すると、ロボットをパック位置に配置でき、 [アンパック (Unpack)]ボタンを使用すると、ロボットをデフォルトのホーム位置に配置できます。