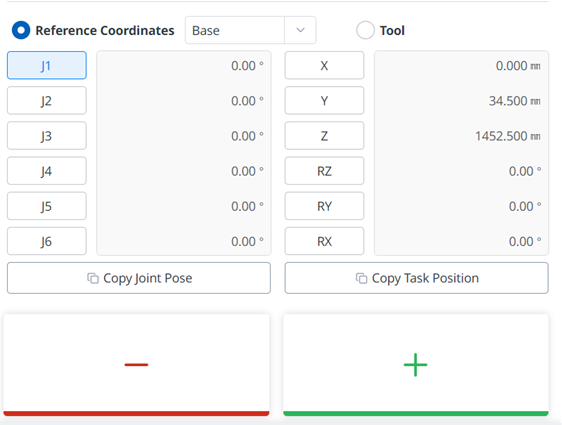
ロボットジョイントに基づいて実行 ロボットジョイントに基づいて角度を調整するには、次の手順を実行します。 ジョイントパネルで角度を調整する軸(J1~J6)を選択します。 方向ボタン ( および )を押したままにして 、対応する軸の角度を調整します。