ロボットを特定の角度で移動するには、次の手順を実行します。
-
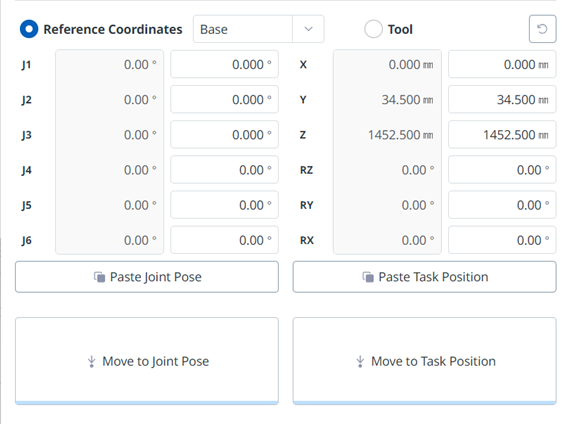
移動 タブを選択します
-
ロボットジョイントのターゲット角度を入力します。
-
リアルモードを有効にします。
-
対応するポーズに移動 ボタンをタップしたままにして、ロボットジョイントの角度を調整します。
ロボットを特定の角度で移動するには、次の手順を実行します。
移動 タブを選択します
ロボットジョイントのターゲット角度を入力します。
リアルモードを有効にします。
対応するポーズに移動 ボタンをタップしたままにして、ロボットジョイントの角度を調整します。