
ロボットツールに基づいてロボットを移動するには、次の手順を実行します。
-
ツールを参照座標系として選択します。
-
タスクパネルで、角度を調整したい軸(X~RX)を選択します。
-
方向ボタン (+、_) を押したままにして、対応する軸を移動します。
-
安全領域は仮想モードでは適用されません。
-
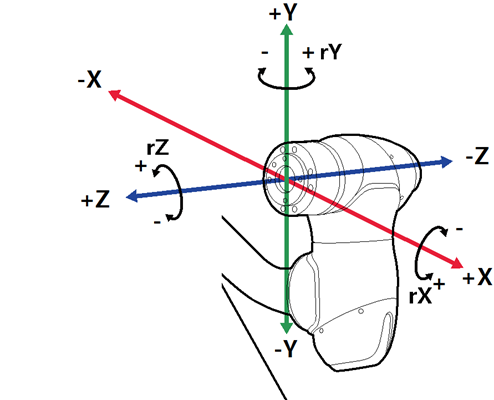
Rx、Ry、およびRzはTCP(工具の中心位置)に従って実行されます。
ロボットツールに基づいてロボットを移動するには、次の手順を実行します。
ツールを参照座標系として選択します。
タスクパネルで、角度を調整したい軸(X~RX)を選択します。
方向ボタン (+、_) を押したままにして、対応する軸を移動します。
安全領域は仮想モードでは適用されません。
Rx、Ry、およびRzはTCP(工具の中心位置)に従って実行されます。