ロボットのワールド座標は、ワールド座標(World Coordinates)から設定できます。ロボット座標がベース座標の場合、このステップはスキップできます。
ワールド座標は 、ロボットパラメーター>ロボット設定>ワールド座標で設定できます。
-
ワールド座標は、ロボットベースの設置場所を物理的に移動/回転するときに使用されます。
-
ワールド座標を変更すると、ロボットシミュレータ画面にも同じ移動/回転が適用されます。
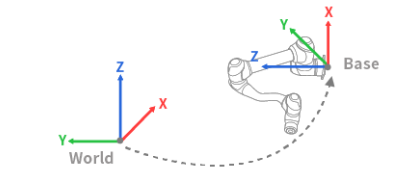
ワールド座標は、ロボットティーチング後にベース位置や角度を変更した後でも使用できます。過去にロボットティーチングによって作成されたタスクの座標をベースからワールドに変更すると、ワールド座標の移動/回転に対応するオフセットがすべてのモーション座標に適用されます。
メニューレイアウト
|
|
項目 |
説明 |
|---|---|---|
|
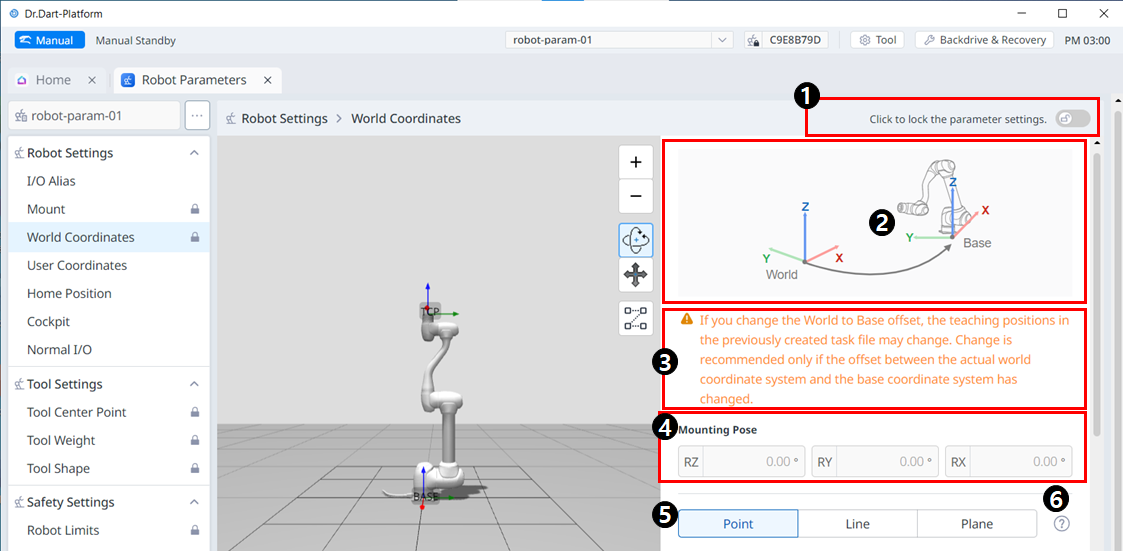
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
情報画像 |
これは、設定に必要な情報イメージです。 |
|
3 |
情報メッセージ |
これは、設定に必要な情報メッセージです。 |
|
4 |
マウントポーズ |
このセクションでは、A、B、およびCのマウントポーズ値について説明します。 |
|
5 |
点、直線、および平面の設定 |
ここで、点、直線、平面の間で目的の項目を選択および設定できます。 |
|
6 |
指導ガイド |
これは、点、直線、および平面を設定するためのガイドです。 |
|
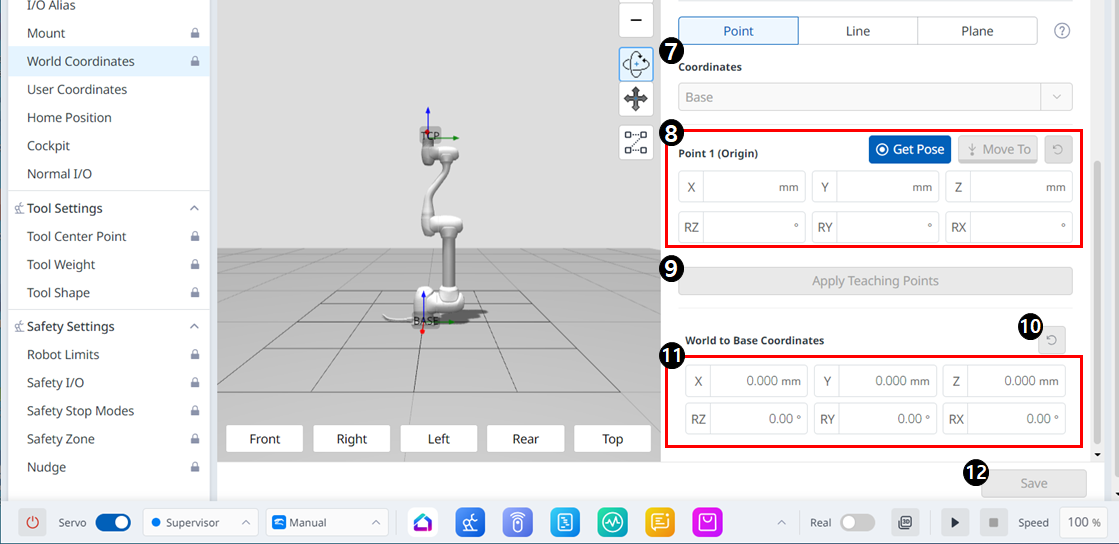
7 |
座標 |
ここで、BaseとWorldの間で必要な座標を選択できます。 |
|
8 |
ポイント1設定 |
ここでは、6つの軸のそれぞれの設定を設定したり、ポーズを取得したり、移動先に移動したりすることができます。 |
|
9 |
[ティーチングポイントの適用]ボタン |
このボタンを使用すると、目的の設定を入力して適用できます。 |
|
10 |
ワールド座標からベース座標へのリセット |
このボタンを使用すると、すでに入力されているベース座標にワールドをリセットできます。 |
|
11 |
ワールド座標の設定 |
ここで、6軸の設定を入力できます。 |
|
12 |
[適用]ボタン |
設定値を適用できます。 |