必須 簡単 5分
直接ティーチングは、ロボットの端を手で持ち、目的のポーズに合わせてロボットを押したり引いたりして、現在選択されているモーションにポーズを適用するために使用されます。 2つの直接教育方法があります。
-
FreeDrive:各ジョイントは、ユーザーが加えた力の方向に移動します。
-
拘束された動作:ロボットの端部は、ランダムな方向から力が適用されている場合でも、拘束された動作で設定された方向にのみ移動または回転します。
フリードライブ
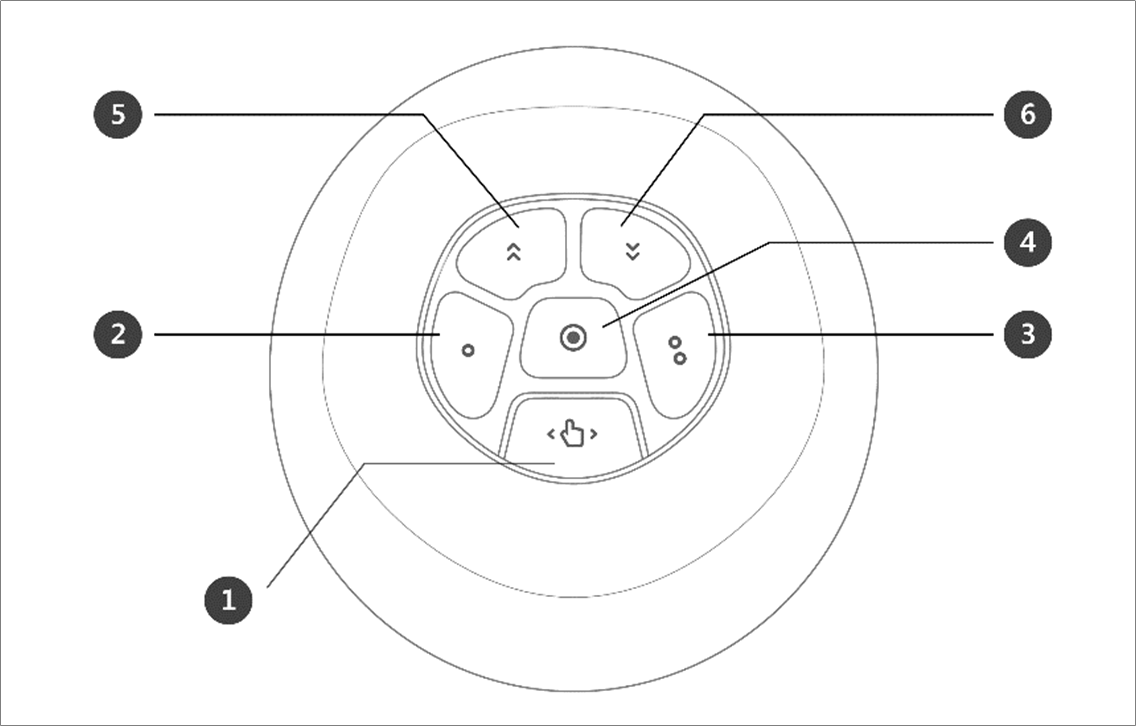
ボタン1を押すと、FreeDriveモードが有効になり、ロボットを自由に移動できます。各ジョイントは、ユーザーが加えた力の方向に移動します。ボタンを離すと、ロボットを手で動かすことはできません。
-
直接ティーチング中は、ロボットLEDがシアンで点滅します。
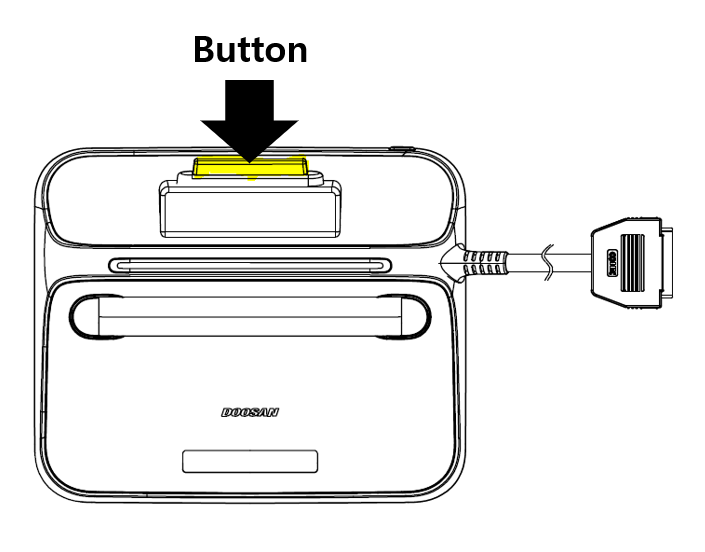
ティーチペンダントの背面にあるハンドガイドボタンを押すと、ボタン1を押すのと同じようにFreeDriveモードがアクティブになり、ロボットを自由に動かすことができます。
拘束された動作
ボタン2とボタン3を押すと、ランダムな方向から力が加えられた場合でも、ロボットの端部は拘束条件に一致する方向にのみ移動します。制約条件は、次の図の4つの条件のうち2つで設定できます。Z軸拘束、平面固定拘束、サーフェス拘束、方向拘束。
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
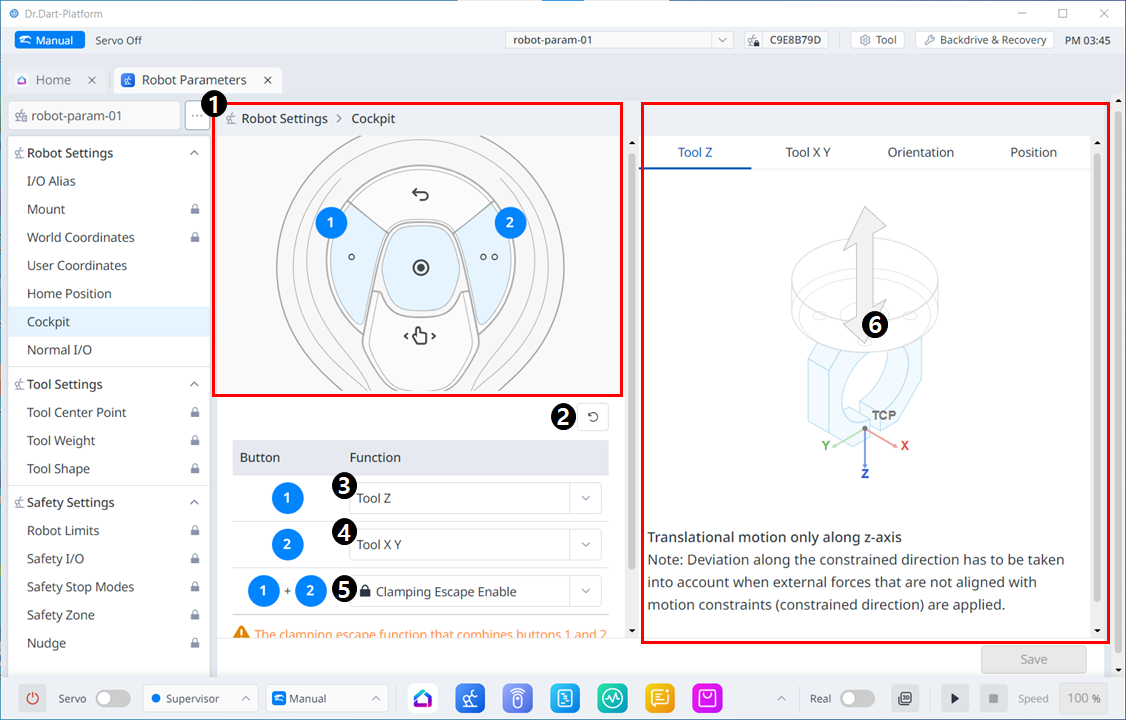
1 |
コックピットの画像 |
これはコックピット設定の画像です。 |
|
2 |
リセット |
このボタンを使用すると、設定値を初期化できます。 |
|
3 |
1ボタン設定 |
このセクションでは、ボタン1に設定する機能を選択できます。 |
|
4 |
2ボタン設定 |
このセクションでは、ボタン2に設定する機能を選択できます。 |
|
5 |
1+2ボタンの設定 |
このセクションでは、ボタン1+2のクランプを有効にするかどうかを選択できます。 |
|
6 |
ガイド画像 |
コックピット設定項目のガイド画像 |