ロボット境界(Robot Limits)では、ロボットに関連するさまざまな境界を設定できます。これらの制限は、ロボットが設定された制限内で安全に動作するようにするために使用されます。
ロボット限界は 、[ロボットパラメーター(Robot Parameter)]>[安全設定(Safety Settings)]>[ロボット限界(Robot Limits)]で設定できます。
-
各境界の詳細については、 『ロボット境界』を参照してください。
ロボット限界は大きく3つのカテゴリに分けられます。各カテゴリには、次の画面と機能があります。
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
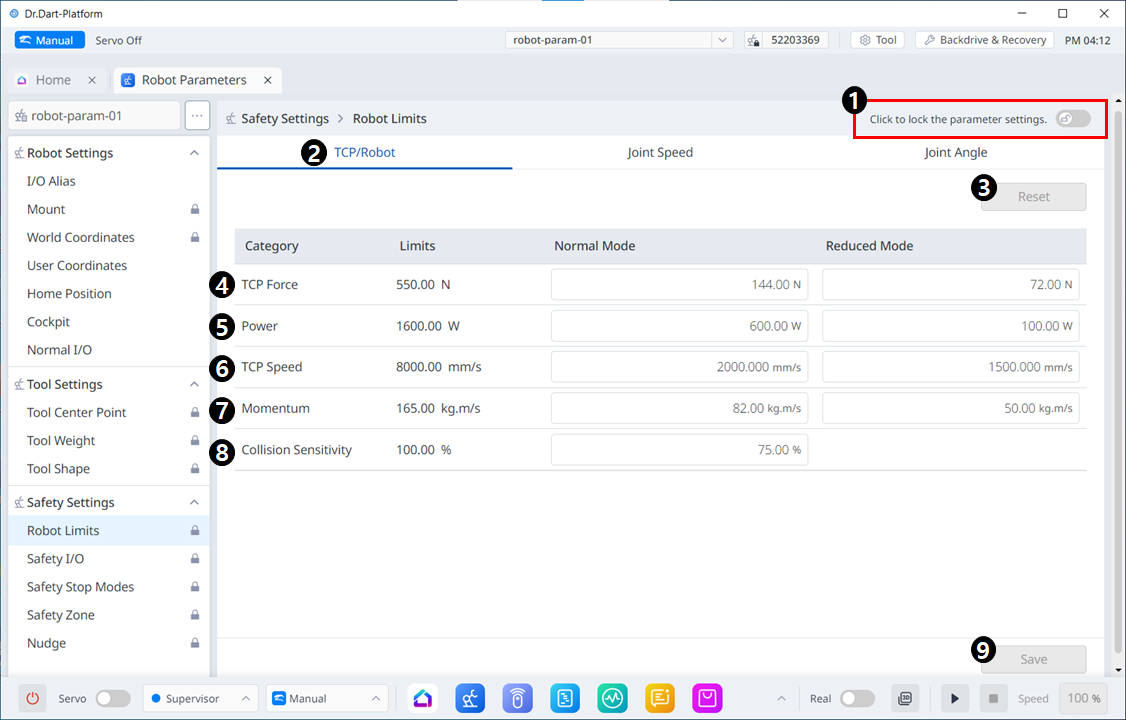
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
TCP/Robot |
ロボット限界の大規模な分類。 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
力 |
力を設定するために使用されます。 |
|
5 |
電源 |
電源を設定するために使用されます。 |
|
6 |
速度 |
速度を設定するために使用します。 |
|
7 |
運動量 |
運動量を設定するために使用されます。 |
|
8 |
衝突 |
衝突を設定するために使用されます。 |
|
9 |
保存 |
適切な設定を保存するために使用します。 |
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
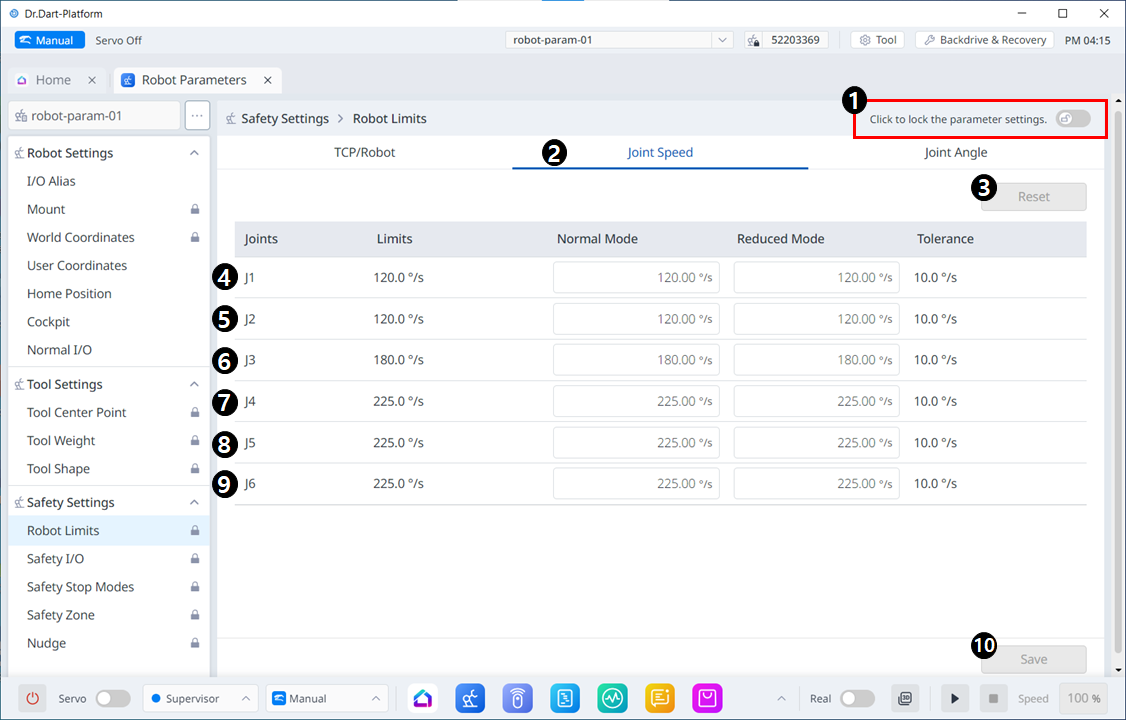
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
ジョイント速度 |
ロボット限界の大規模な分類。 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
J1 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
5 |
J2 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
6 |
J3 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
7 |
J4 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
8 |
J5 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
9 |
J6 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
10 |
保存 |
適切な設定を保存するために使用します。 |
メニュー項目
|
|
項目 |
説明 |
|---|---|---|
|
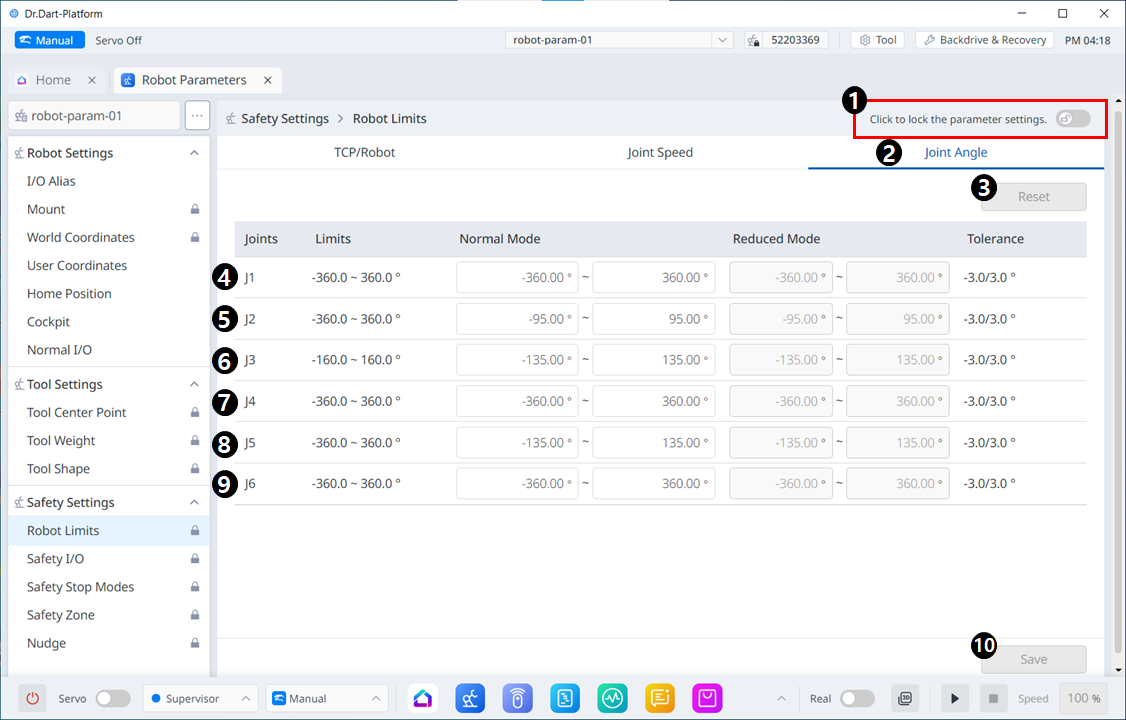
1 |
ロック切り替えボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
ジョイント角度 |
ロボット限界の大規模な分類。 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
J1 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
5 |
J2 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
6 |
J3 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
7 |
J4 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
8 |
J5 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
9 |
J6 |
標準モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
10 |
保存 |
適切な設定を保存するために使用します。 |