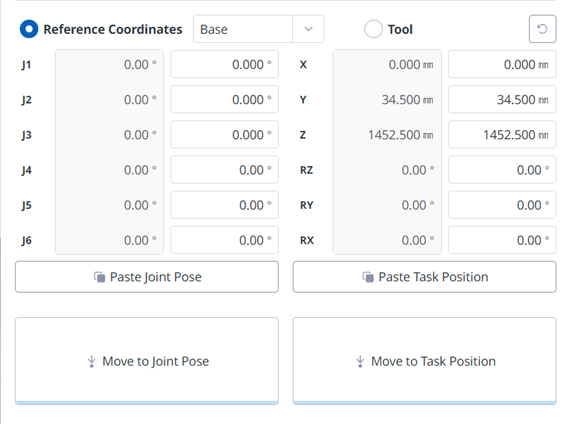
移動する基準座標の設定 ロボットをそのベース座標に基づいて移動するには: [移動] タブを選択し、[参照座標] 項目を選択します。 基準となる表示座標を選択します。 ボタンを長押しすると、対応するタスクの位置に移動し、設定した座標に移動します。