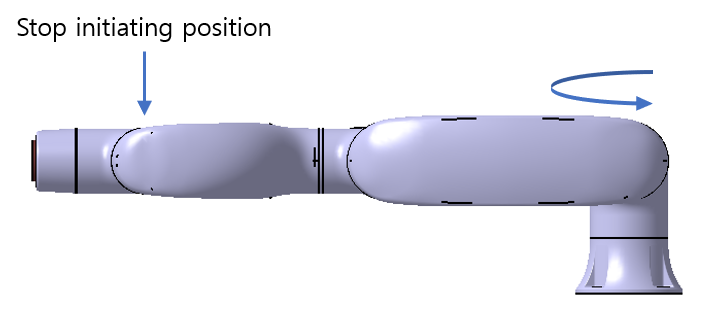
ジョイント1の測定は、回転軸が地面と垂直な状態で、水平方向に動いているときに測定されました。
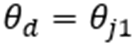
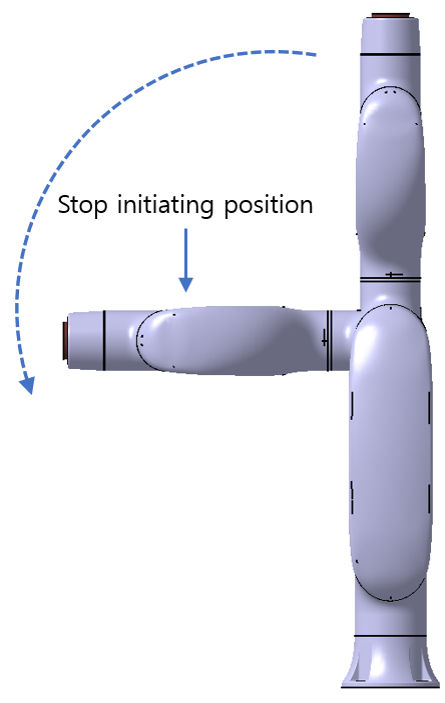
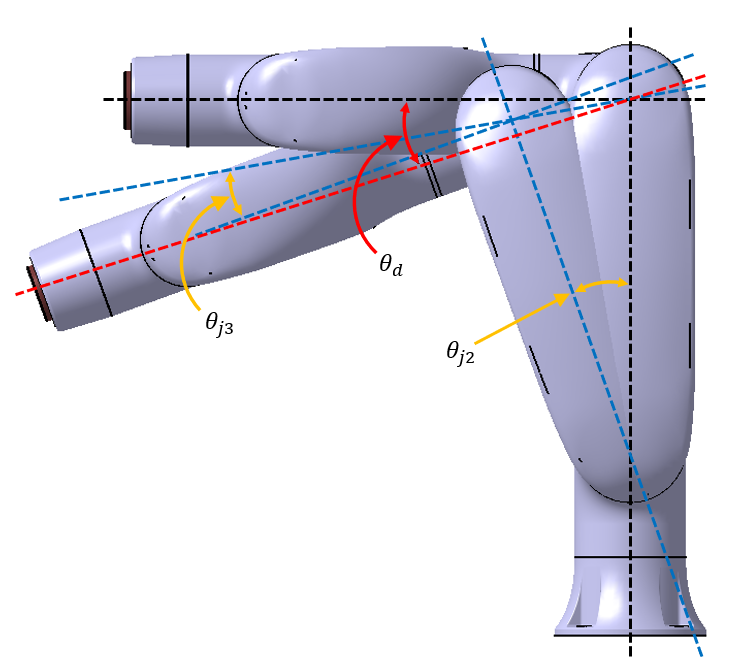
ジョイント2とジョイント3の測定は、回転軸が地面と平行な状態で、ロボットが地面と垂直な経路に沿って下方向に動いている途中で停止させて測定しました。
この測定値は、最悪条件の結果です。測定状況によって異なる場合があります。
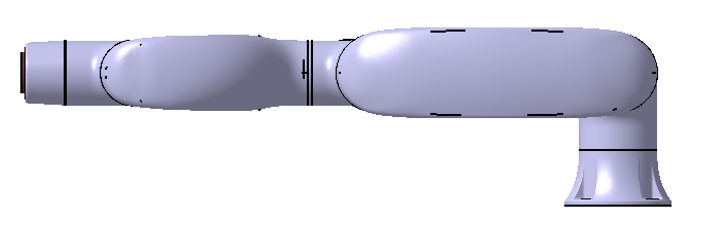
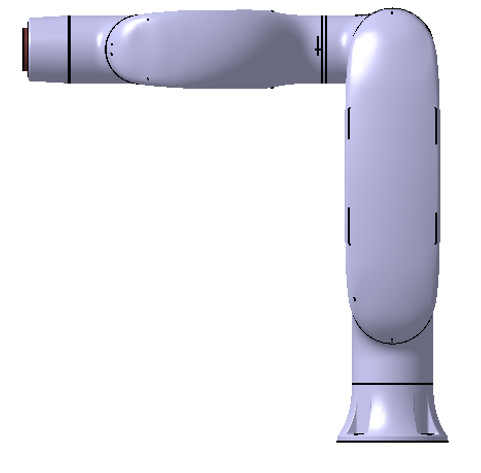
The pose for 33%, 66%, and 100% of extension
|
|
Joint 1 |
Joint 2 |
Joint 3 |
|
100% extension Stop category 0 |
|
|
|
|
33% extension Stop category 1 |
|
|
- |
|
66% extension Stop category 1 |
|
|
- |
|
100% extension Stop category 1 |
|
|
|
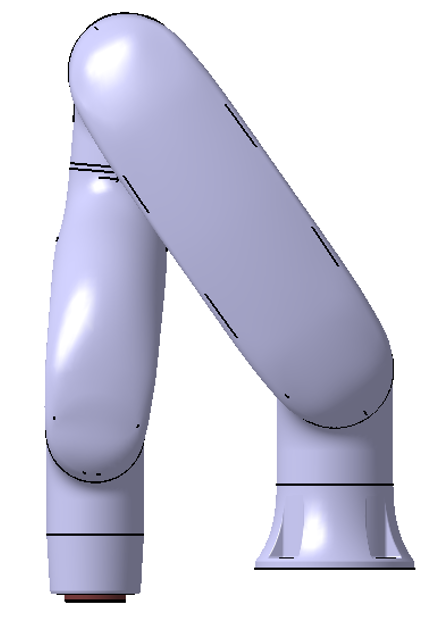
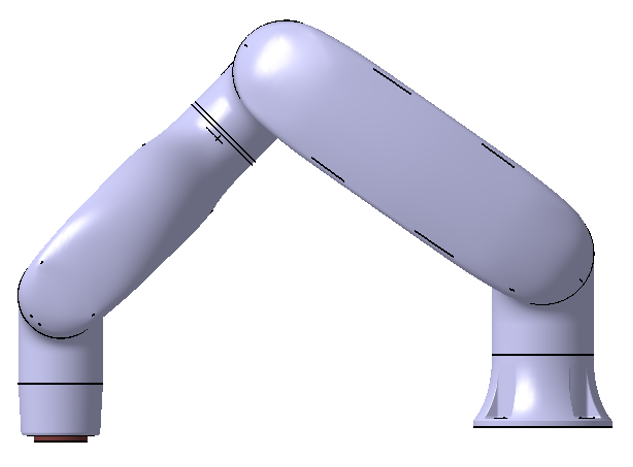
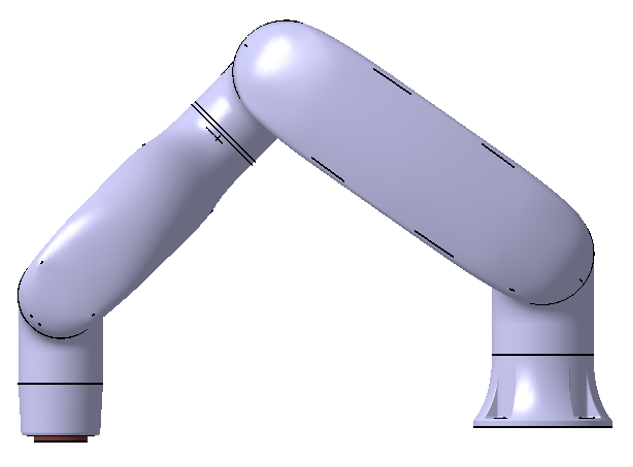
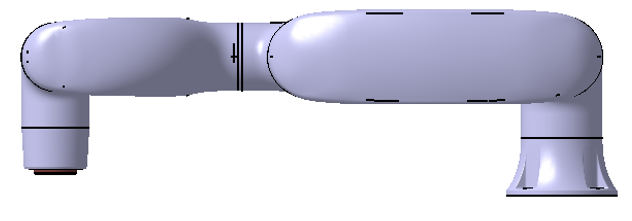
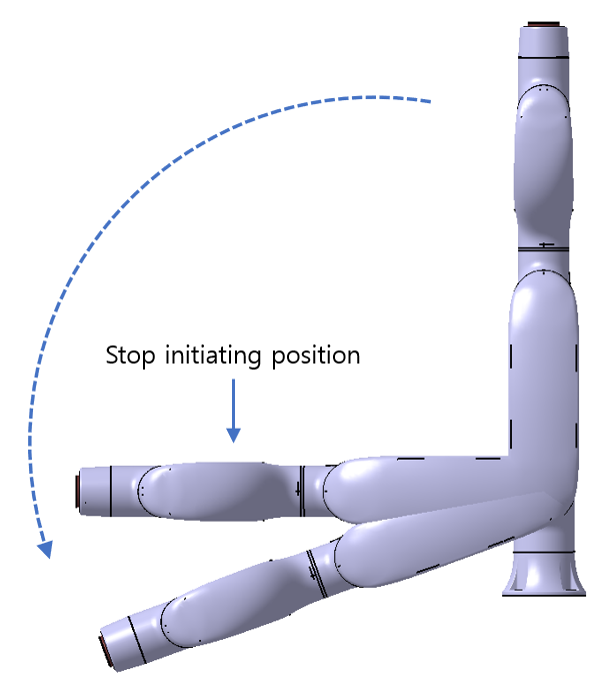
The pose when the stop is initiated and the measured angle (  )
)
|
|
Pose when the stop is initiated |
Measured Angle |
|
Joint1
|
|
No slip, |
|
Joint2 |
|
|
|
Joint3 |
|
|