ワールド座標に基づいてロボットを移動するには、次の手順を実行します。
-
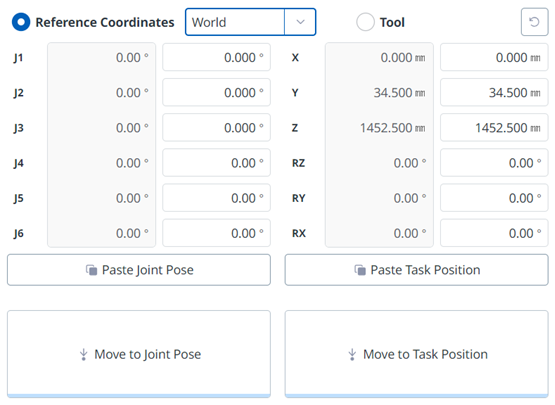
移動タブと「参照座標」を選択します。
-
表示座標としてワールド(World)を選択し、 ワールド (World)タブを選択する。
-
ワールド座標を参照して移動するようにポーズを設定します。
-
[対応するポーズに移動]ボタンをタップしたままにすると、設定した座標に移動します。
ワールド座標に基づいてロボットを移動するには、次の手順を実行します。
移動タブと「参照座標」を選択します。
表示座標としてワールド(World)を選択し、 ワールド (World)タブを選択する。
ワールド座標を参照して移動するようにポーズを設定します。
[対応するポーズに移動]ボタンをタップしたままにすると、設定した座標に移動します。