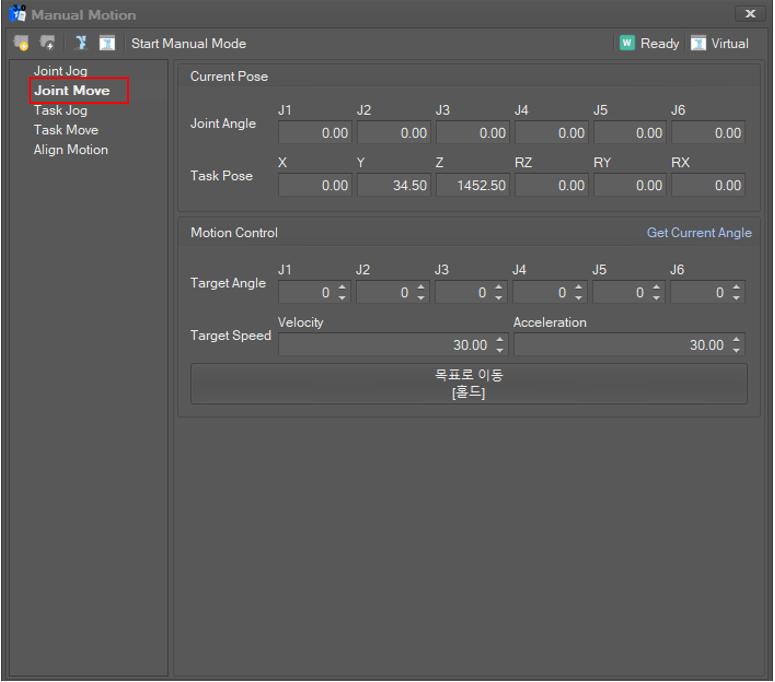
Select Joint Move in the Manual Motion list. Then, the current joint angles and TCP position are displayed and updated in 100 milliseconds.
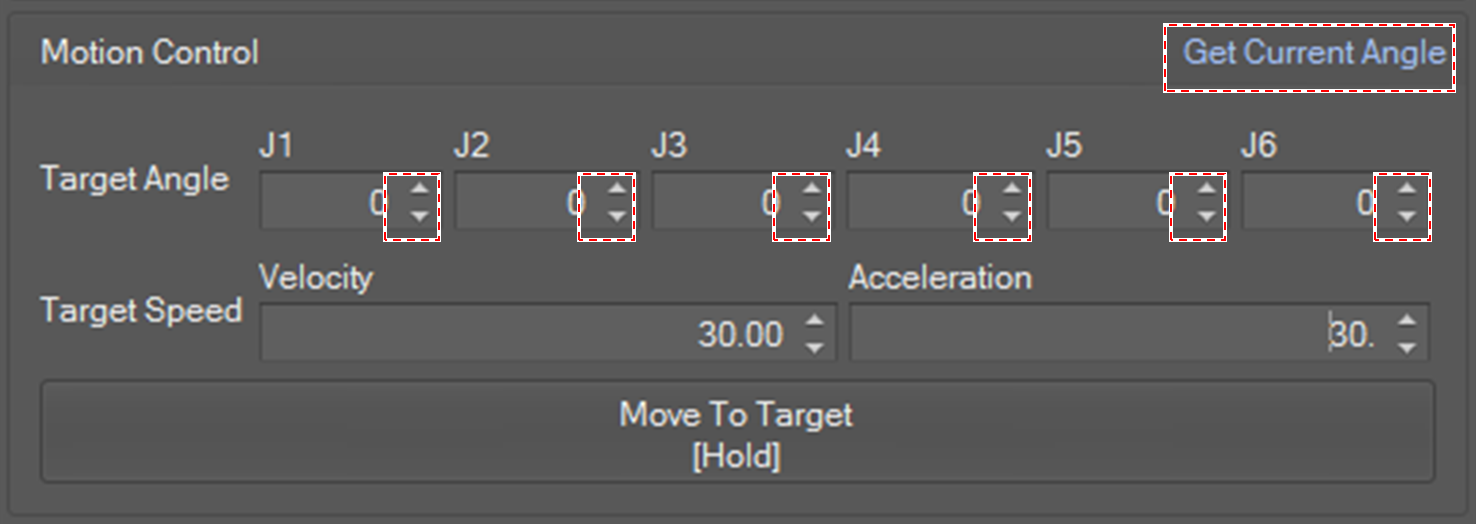
Set the target joint angles
To set the target angles, type the value or click the spin button.
-
To load the current angle in the Target Angle field, click the Get Current Angle
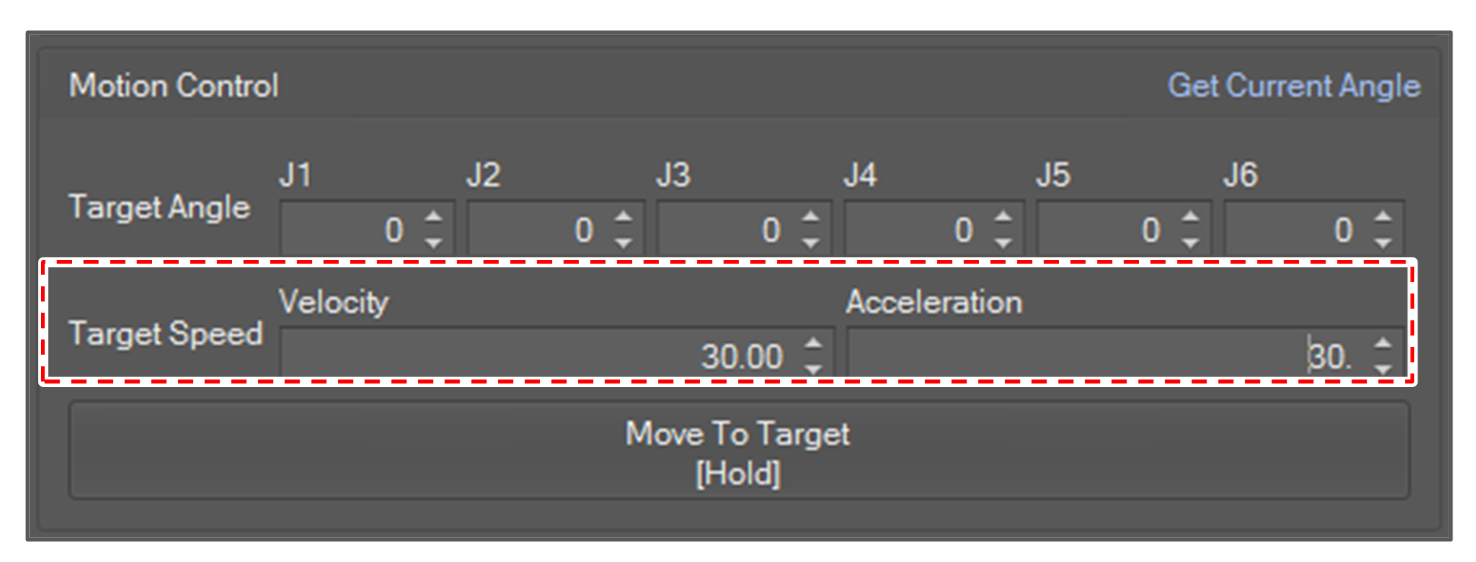
Set the speed and acceleration
To set the speed and acceleration, type the value or click the spin button.
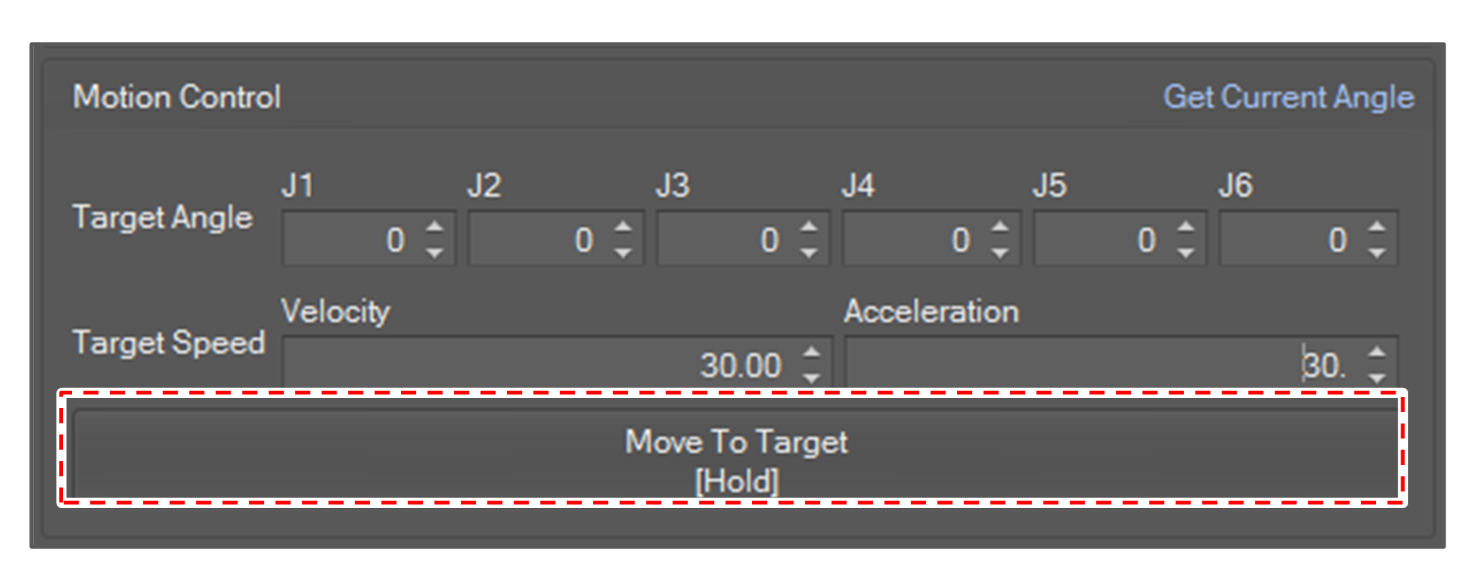
Start motion
Click and hold the Move To Target button to move the robot to the target angles in the way of “MoveJ.” If the button is released, the robot will stop.