주의
예제를 시작하기 전에 반드시 주의사항을 확인하십시오. 자세한 내용은 PART 1. 안전 매뉴얼을 참조하십시오.
알아두기
-
순응 제어를 켜거나 끌 때 임계값(Threshold of JTS error) 이상의 외부 토크가 있으면 로봇은 JTS(Joint Torque Sensor) 오류로 프로그램을 정지합니다.
-
강성(stiffness) 변경(Change)은 외부 토크의 크기와 관계없이 실행 할 수 있습니다.
-
순응 제어 중에는 MoveJ 명령어와 같은 조인트 모션을 수행할 수 없습니다.
|
Threshold of JTS error (Nm) |
||||||
|
Model |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
M1013 |
25 |
25 |
25 |
15 |
15 |
15 |
|
M0617 |
30 |
30 |
30 |
15 |
15 |
15 |
|
M0609 |
18 |
18 |
15 |
15 |
15 |
15 |
|
M1509 |
18 |
18 |
15 |
15 |
15 |
15 |
|
H2515 |
40 |
50 |
40 |
15 |
15 |
15 |
|
H2017 |
40 |
50 |
40 |
15 |
15 |
15 |
-
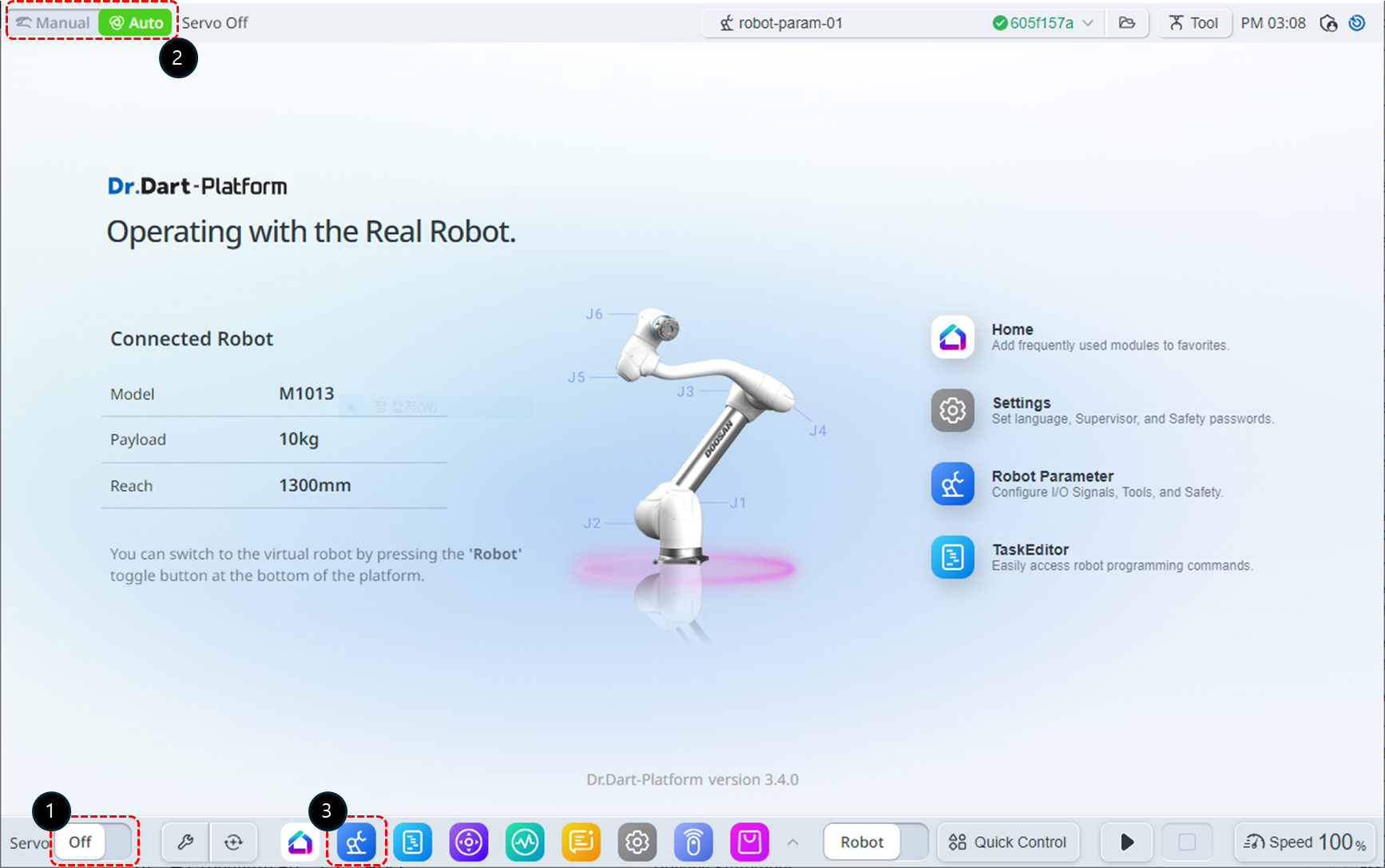
로봇의 Servo 상태를 On으로 변경하십시오.
-
로봇의 동작 Mode를 Manual로 변경하십시오.
-
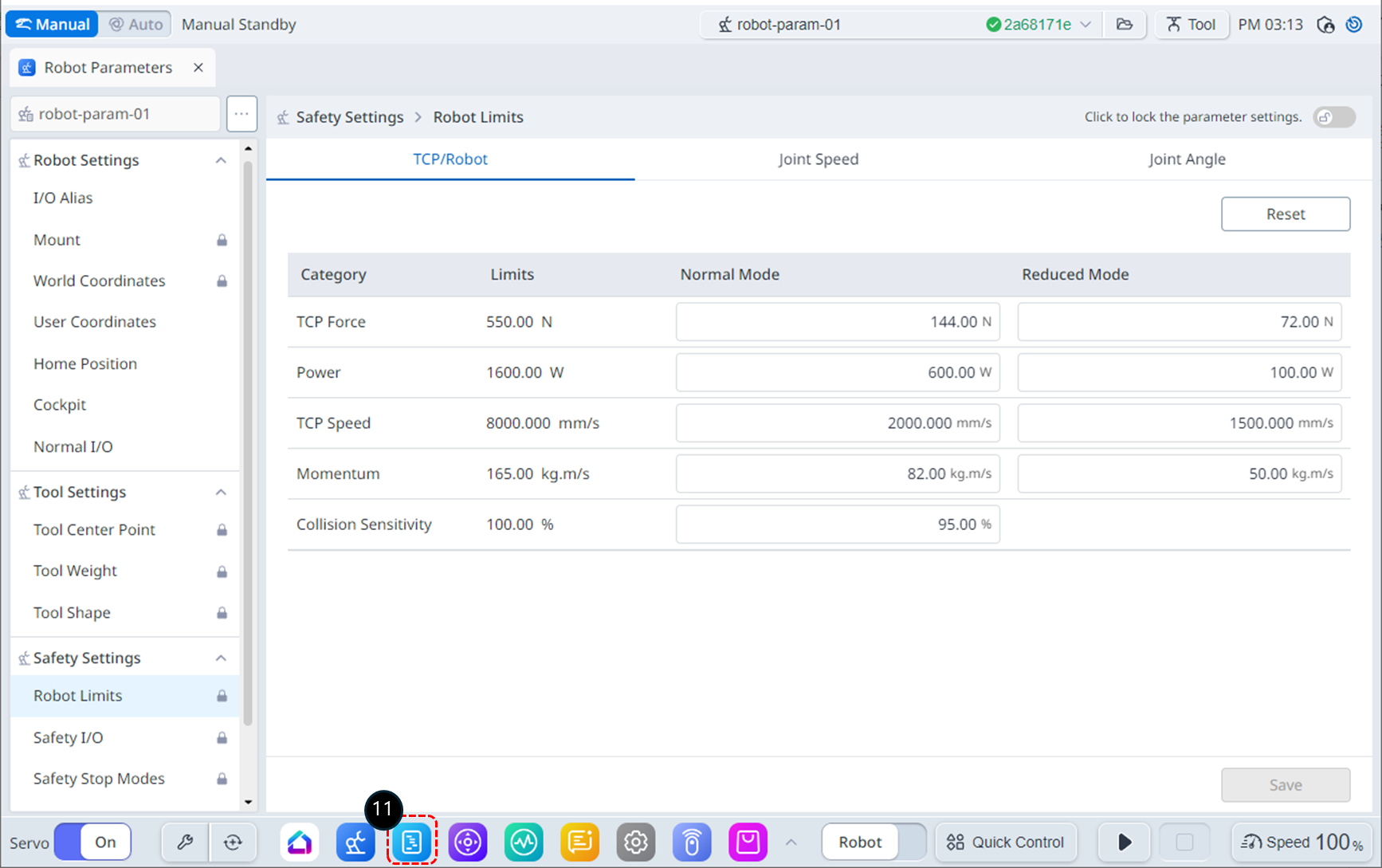
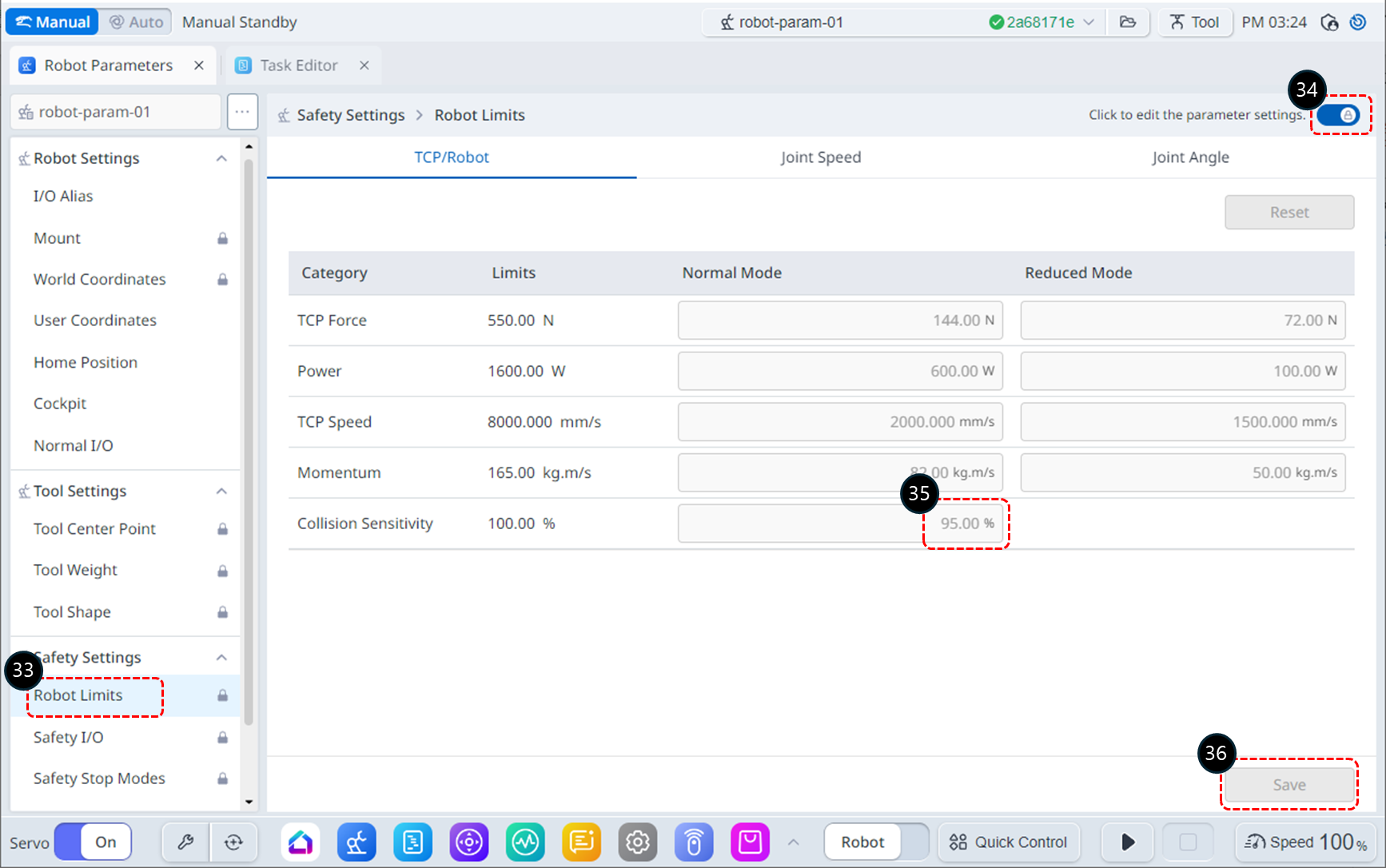
하단 메뉴에서 Robot Parameters 모듈을 선택하십시오. 이 예제에서는 순응 제어 사용 시 충돌 민감도(Collision Sensitivity)를 낮춰야 하는 이유를 설명하기 위해 충돌 민감도(Collision Sensitivity)를 95%로 설정합니다.
-
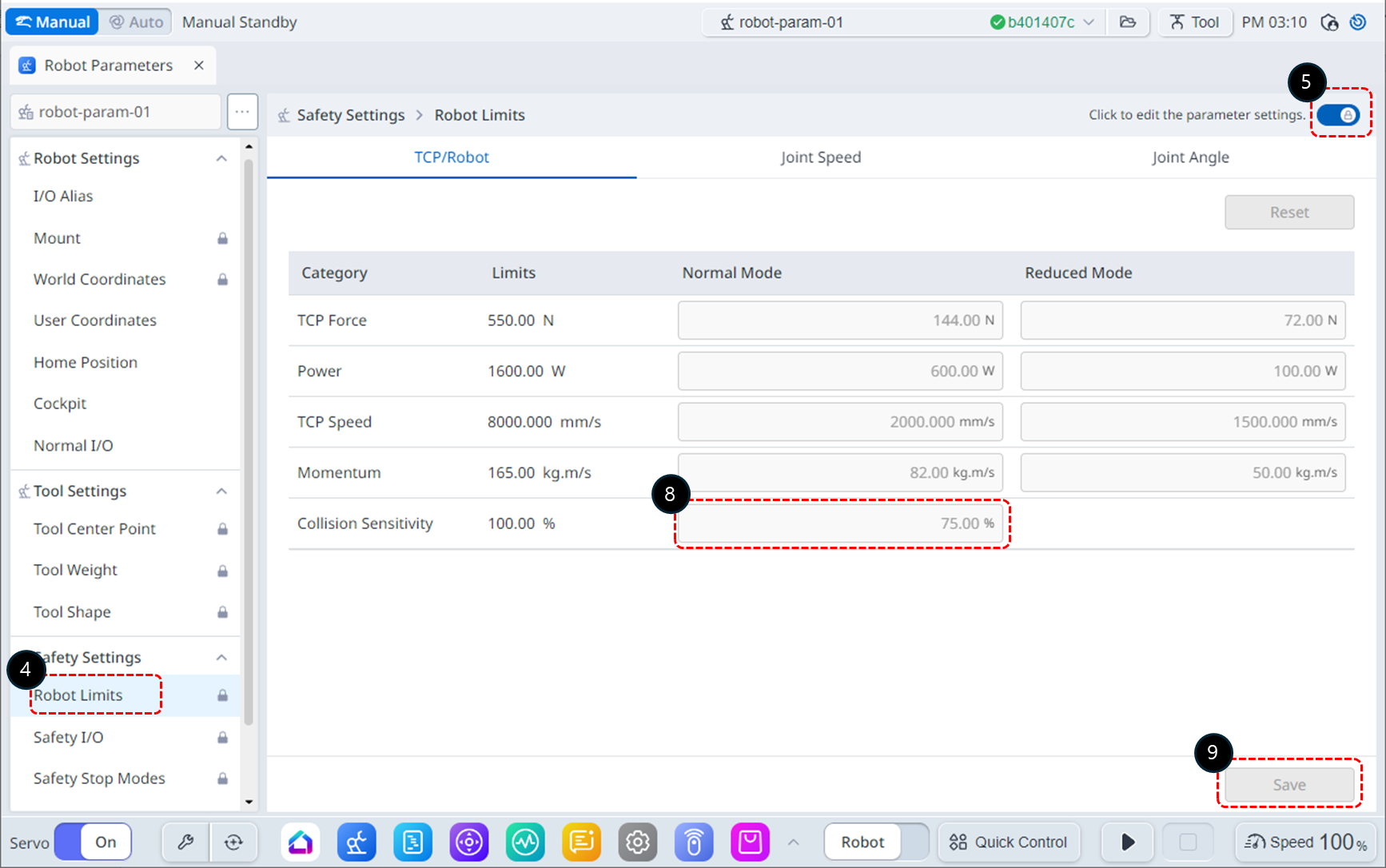
Safety Settings의 Robot Limits를 선택하십시오.
-
파라미터 편집 가능 상태를 활성화 하십시오.
-
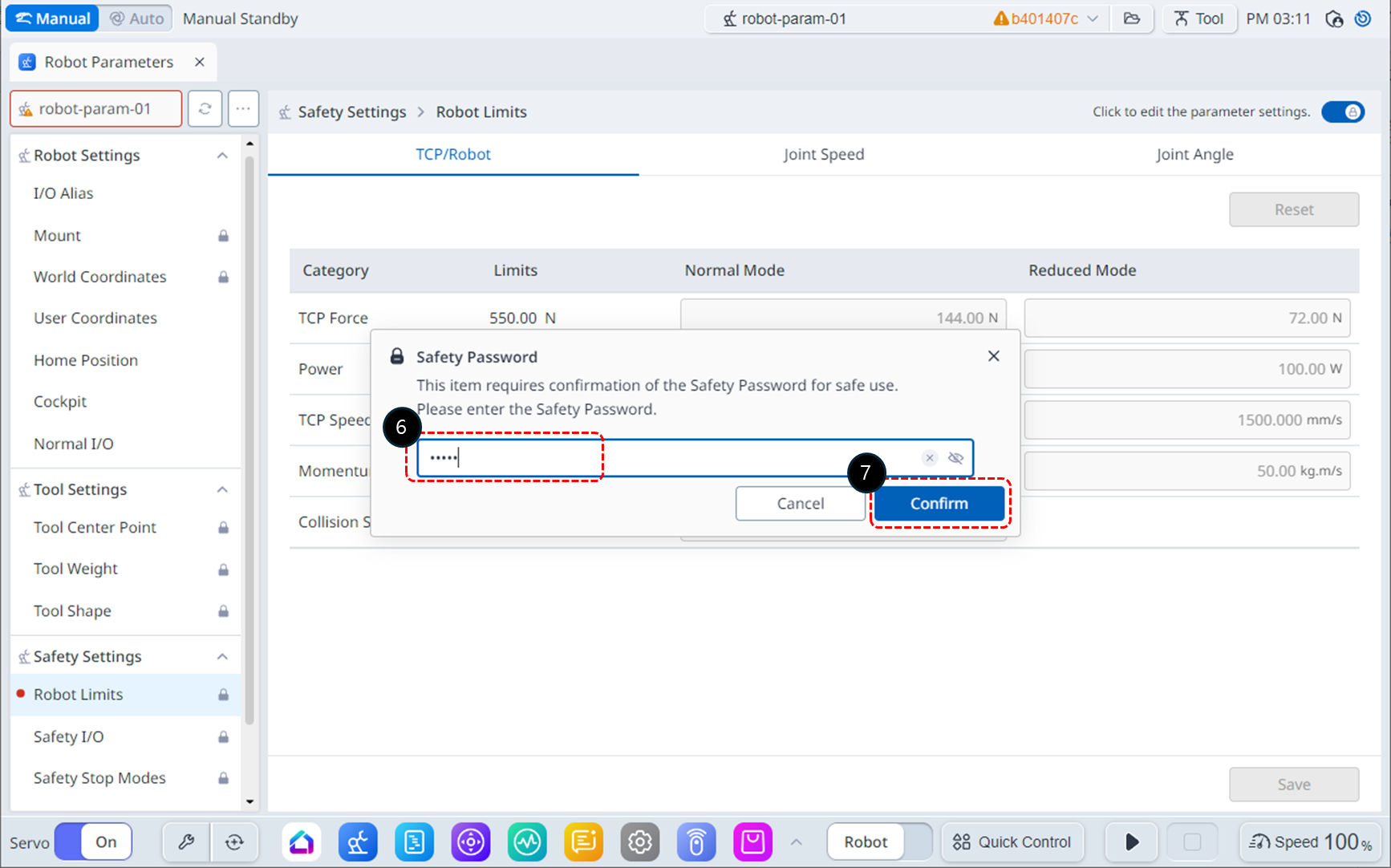
비밀번호 입력창이 나올 시에 Safety Password를 입력하십시오. (default safety password: admin)
-
확인(Confirm) 버튼을 누르십시오.
-
충돌 민감도(Collision Sensitivity)를 95%로 수정하십시오.
-
설정 저장(Save) 버튼을 누르십시오.
-
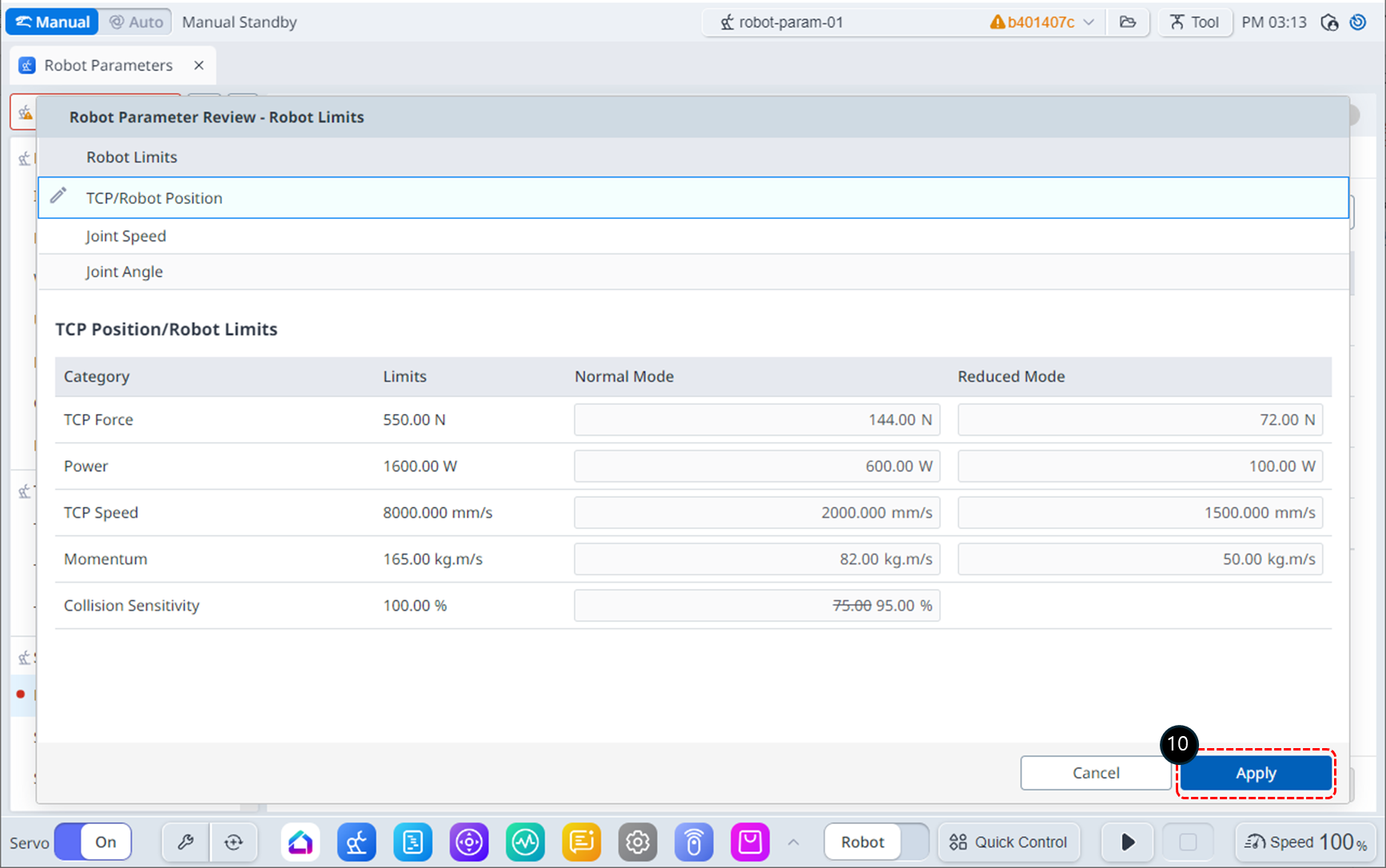
수정사항을 확인하신 후에 적용(Apply) 버튼을 누르십시오.
-
하단 메뉴에서 Task Editor 모듈을 선택하십시오.
-
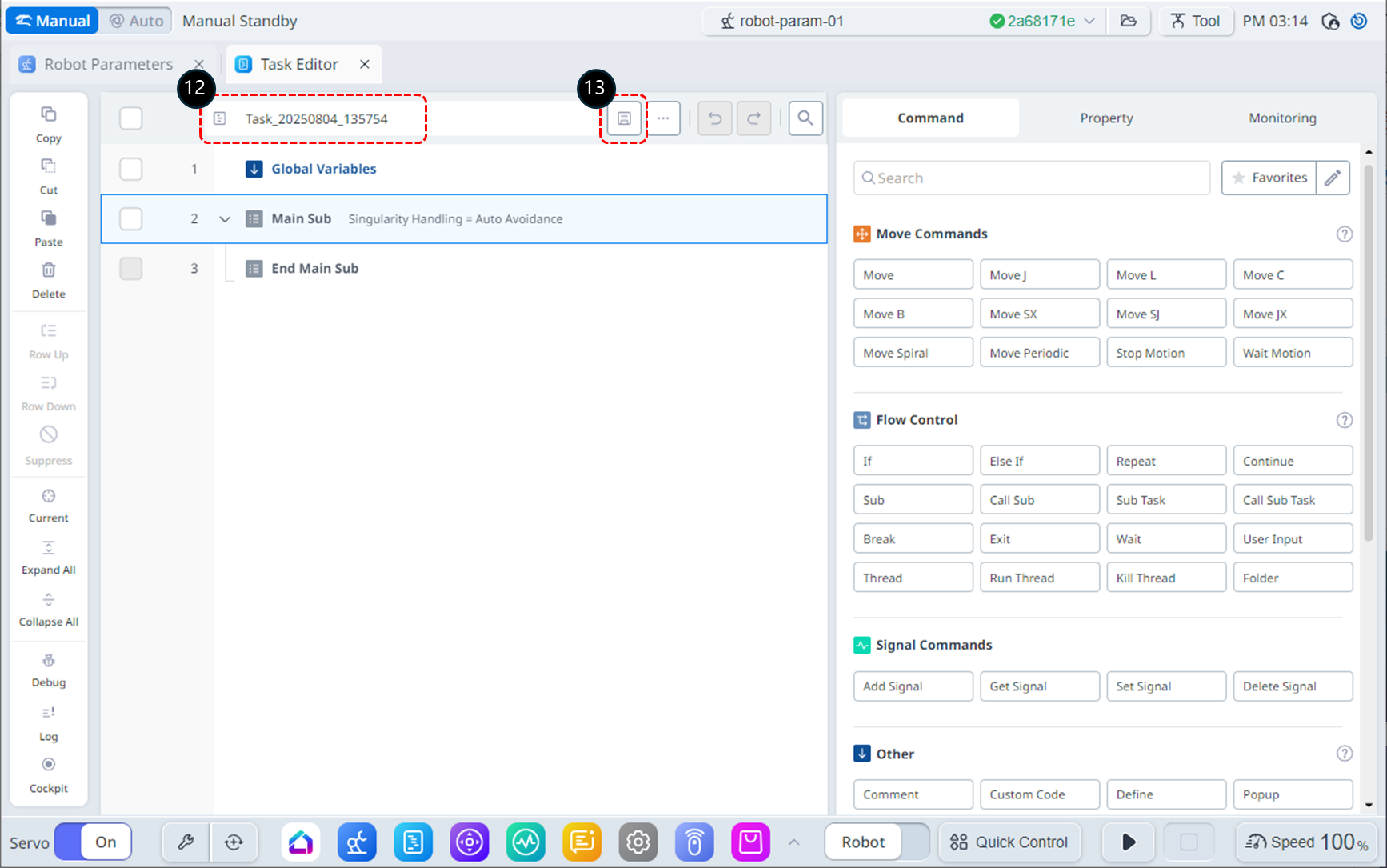
Task 이름을 Task_demo_compliance_ctrl로 수정하십시오.
-
수정한 Task 이름을 저장하십시오.
-
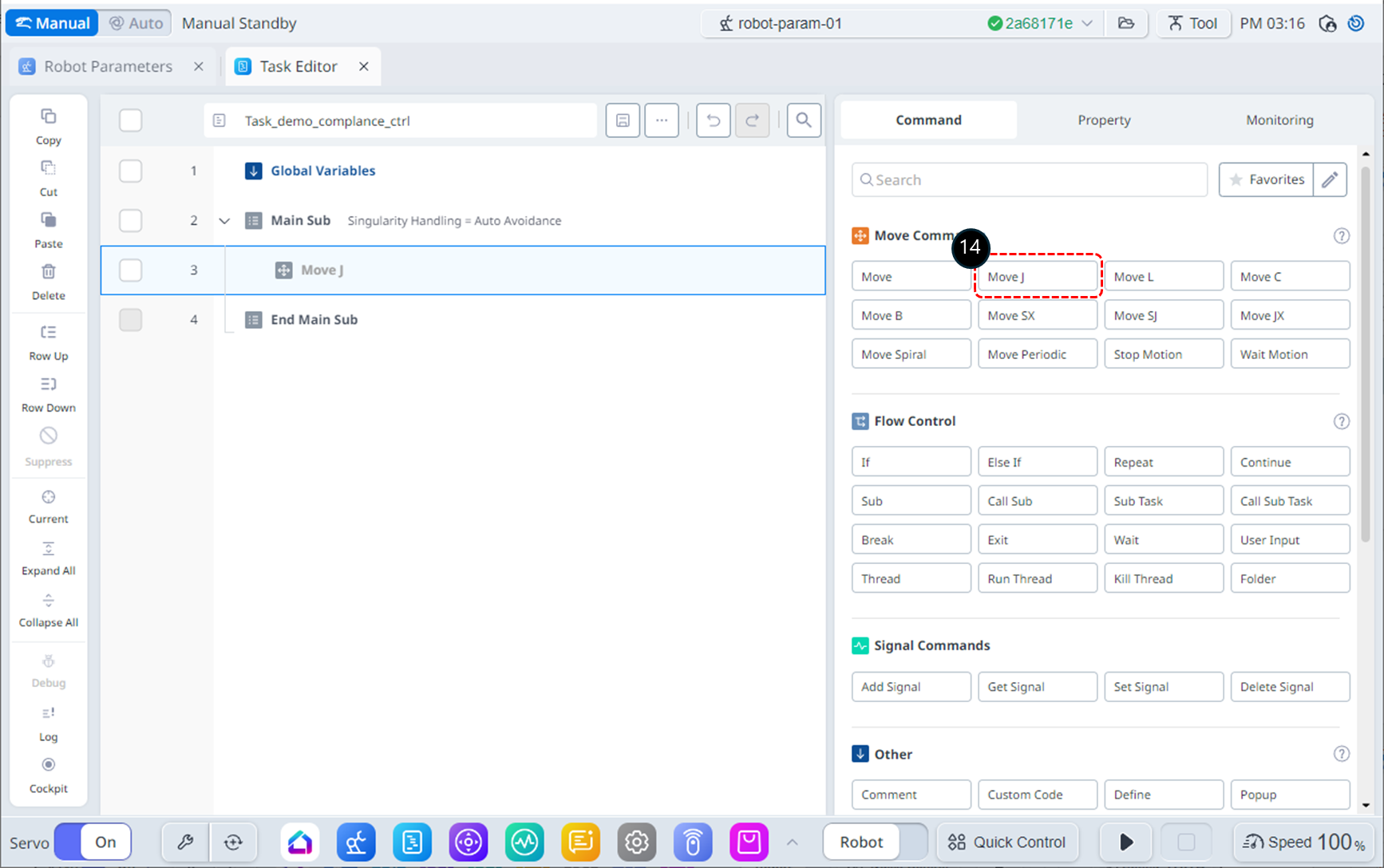
MoveJ 명령어를 추가하십시오. 이 명령어는 로봇의 순응 제어 시작 위치로 이동하는데 사용될 예정입니다.
-
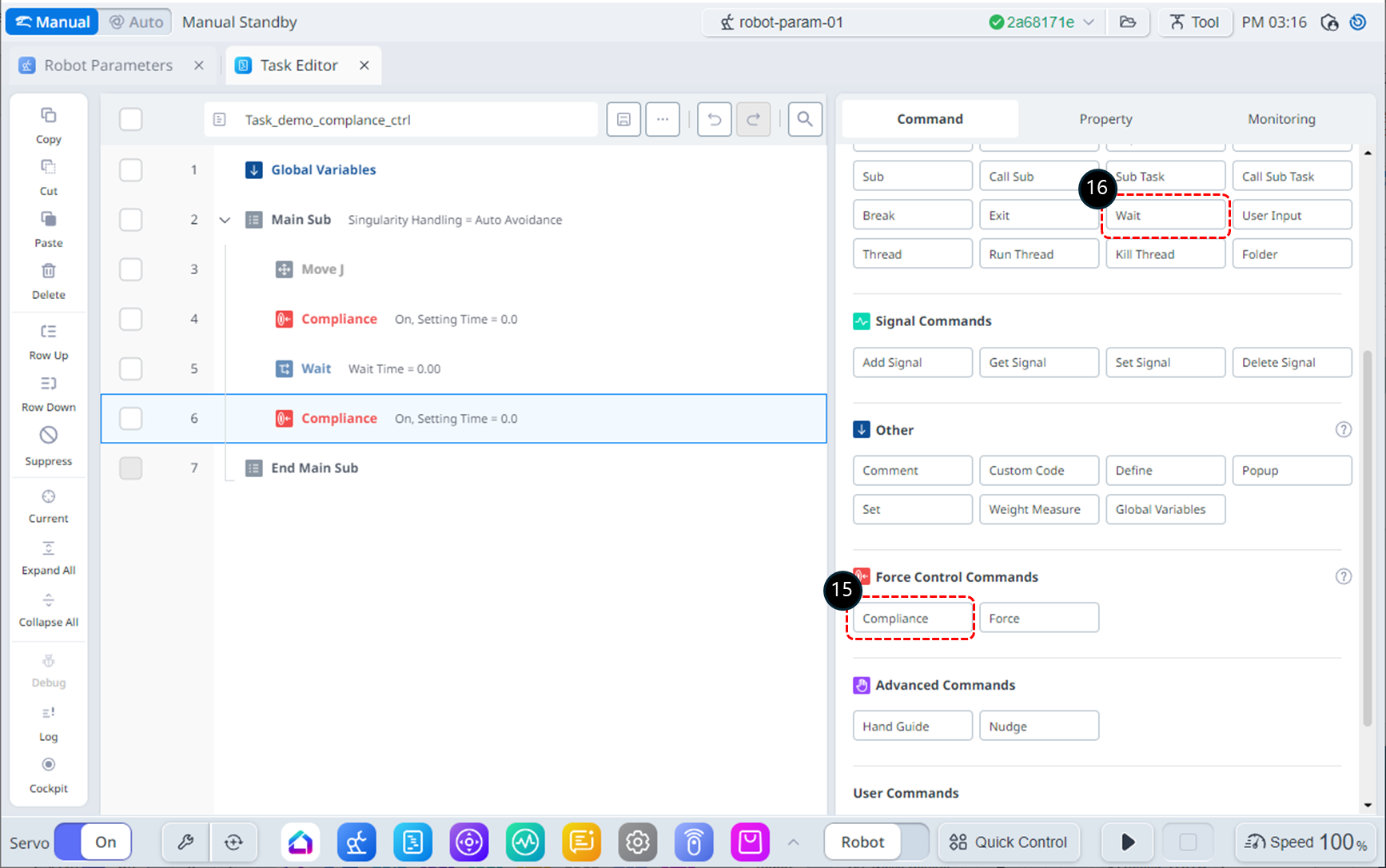
Compliance 명령어를 2개 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 활성화/비활성화하는데 사용될 예정입니다.
-
Compliance 명령어 사이에 Wait 명령어를 추가하십시오. 이 명령어는 순응 제어를 유지하기 위해 사용될 예정입니다.
-
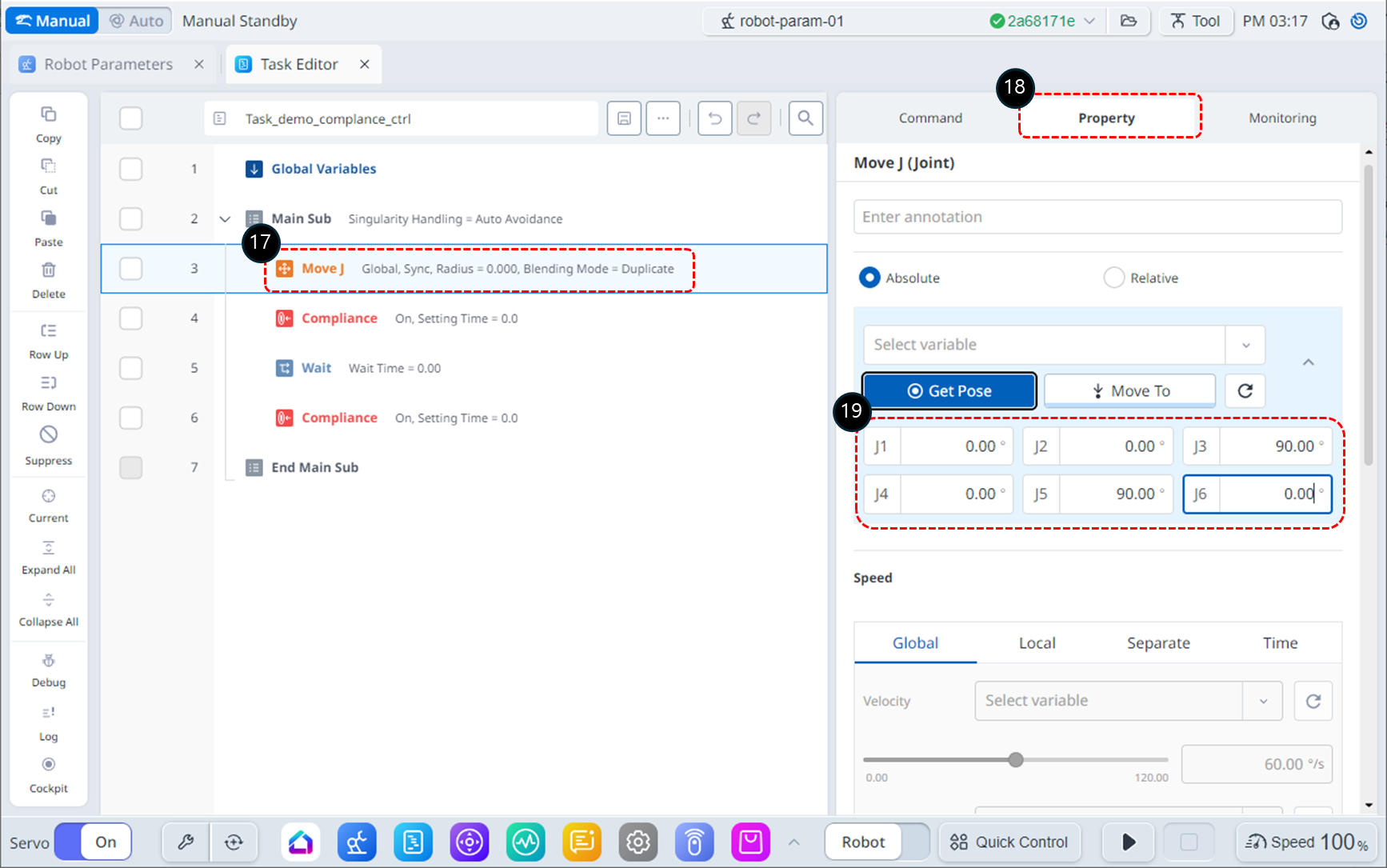
3번 줄의 MoveJ 명령어를 선택하십시오
-
속성(Property) 탭을 선택하십시오.
-
MoveJ의 목표 위치를 (0, 0, 90, 0, 90, 0)deg로 수정하십시오. 로봇의 설치 공간에 따라 J1의 각도는 변경해도 상관없습니다.
-
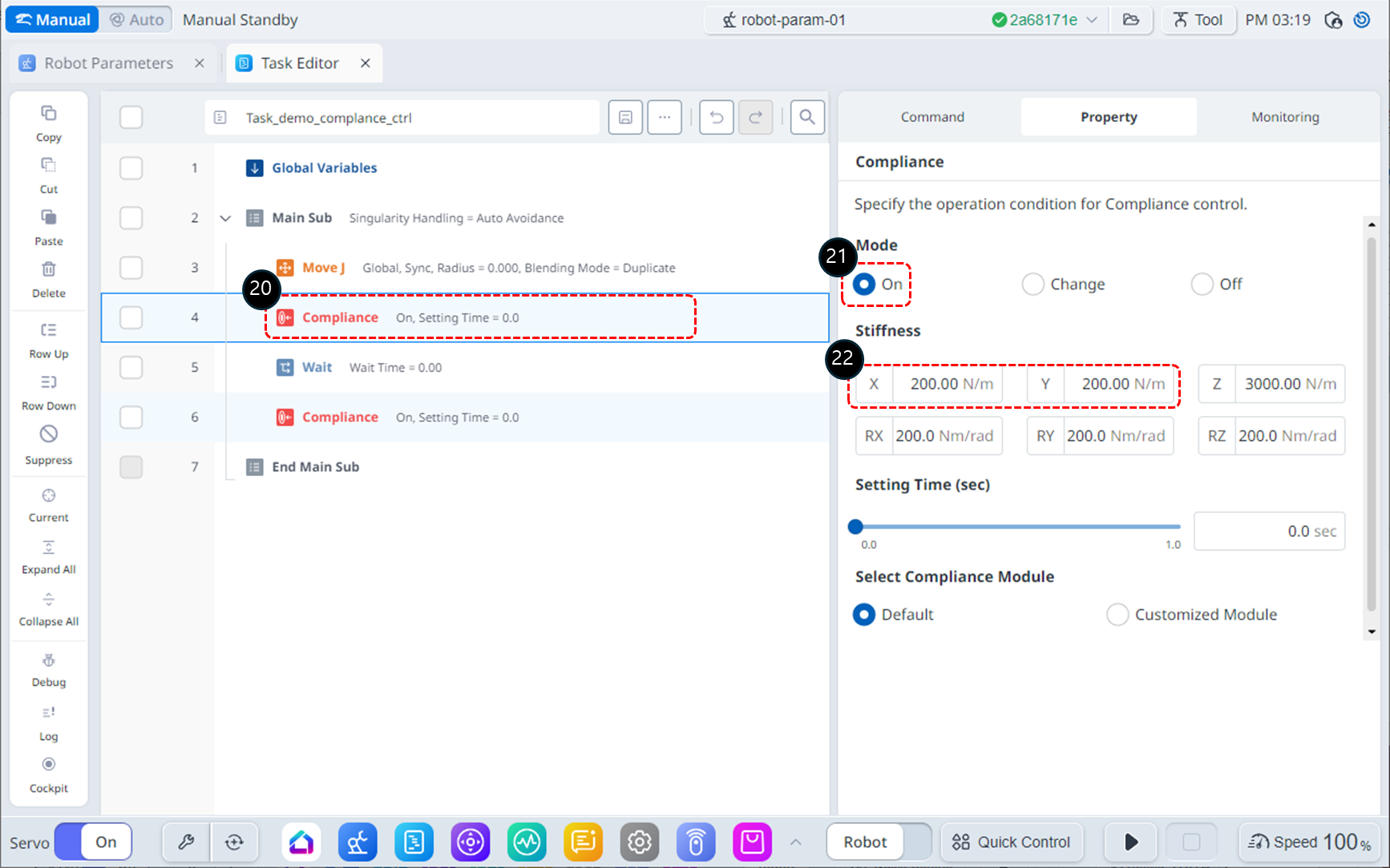
4번 줄의 Compliance 명령어를 선택하십시오.
-
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode On은 순응 제어를 활성화 합니다.
-
Mode : On
-
-
강성(Stiffness)를 다음과 같이 설정합니다. X, Y 방향의 강성을 낮추어 X, Y 방향으로 조금 더 유연하게 반응하도록 하겠습니다.
-
X : 200 N/m
-
Y : 200 N/m
-
Z : 3000 N/m (default)
-
Rx, Ry, Rz : 200 Nm/rad (default)
-
-
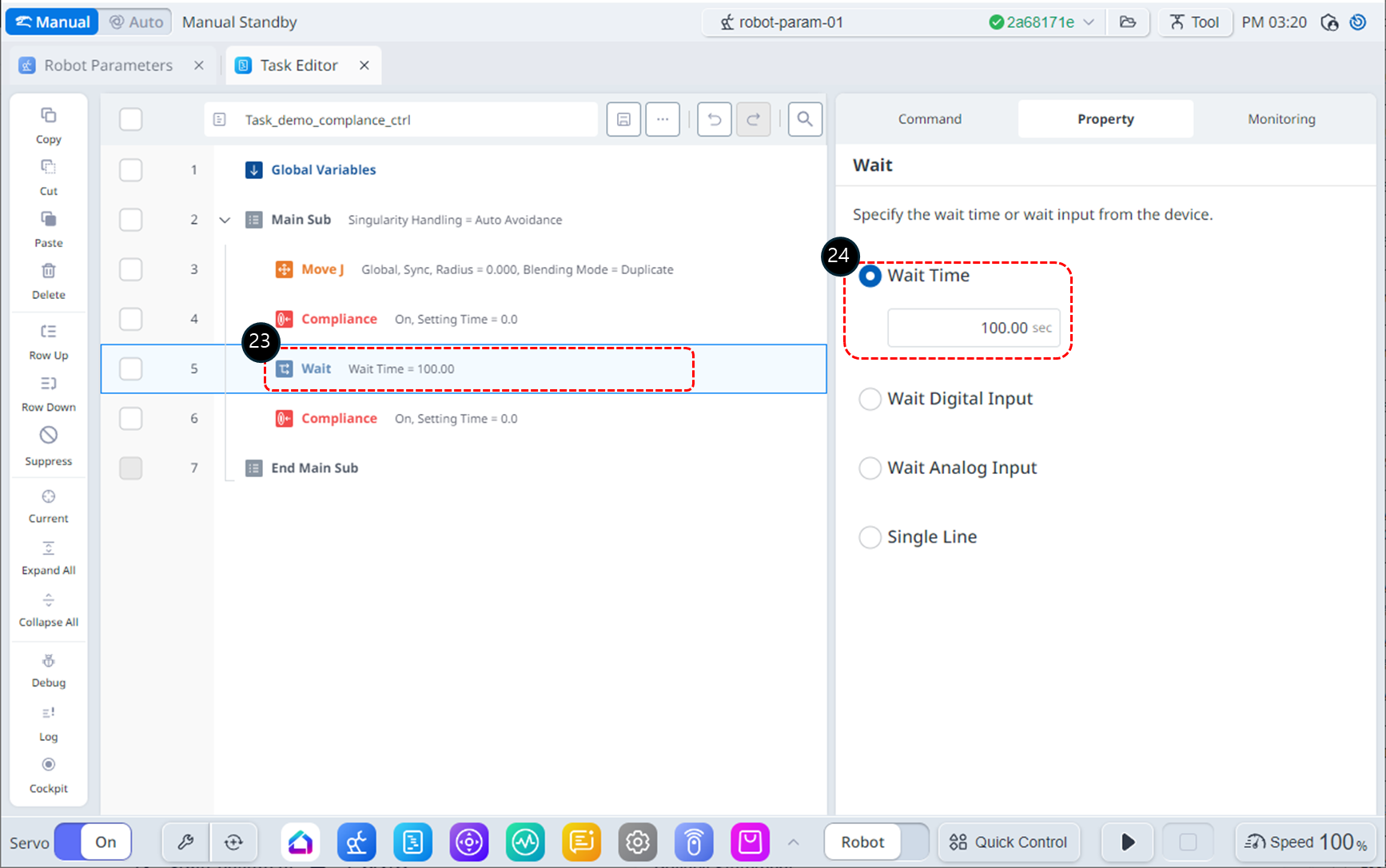
5번 줄의 Wait 명령어를 선택하십시오.
-
Wait Time을 다음과 같이 설정합니다.
-
Wait Time : 100 sec
-
-
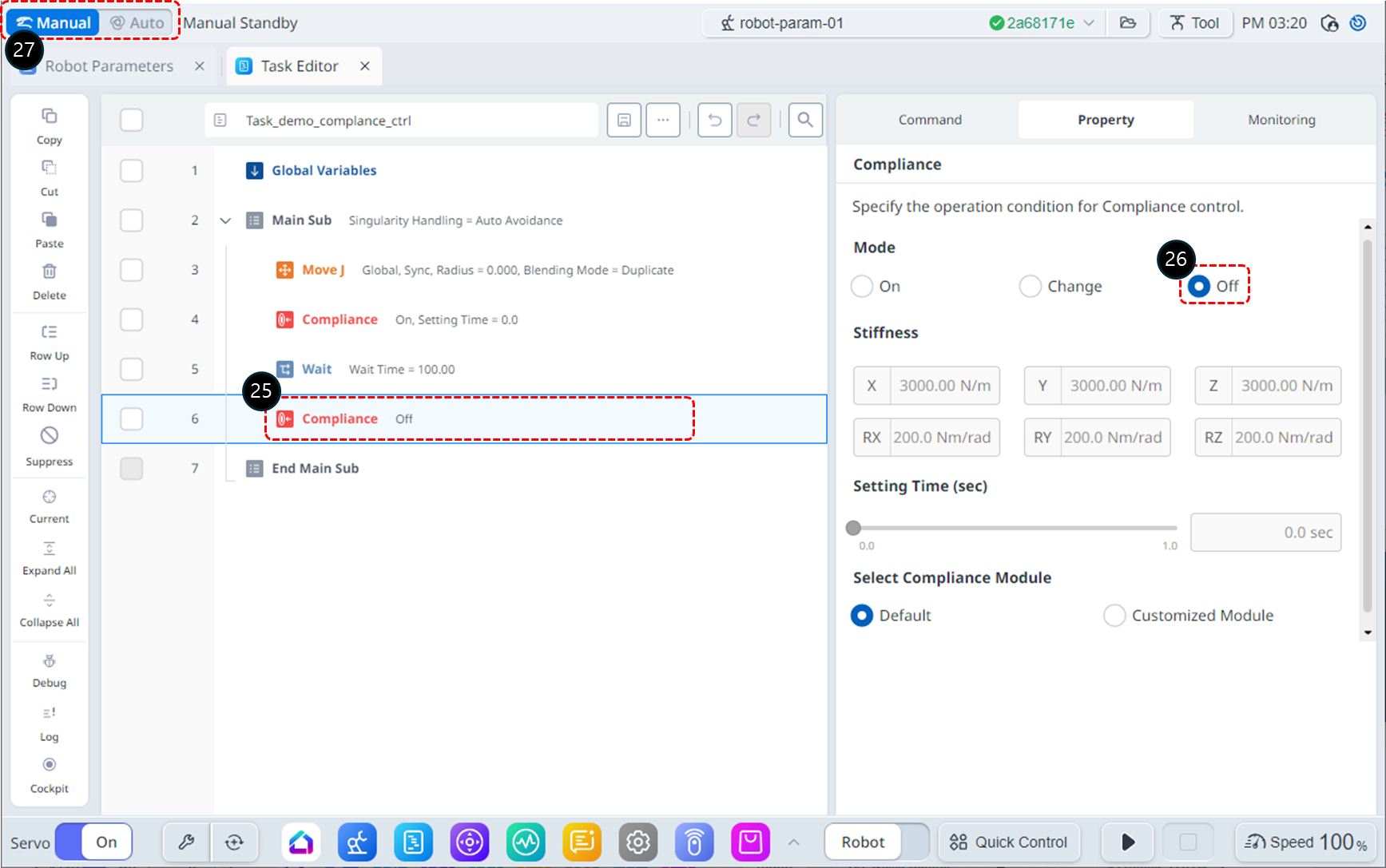
6번 줄의 Compliance 명령어를 선택하십시오.
-
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode Off는 순응 제어를 비활성화 합니다.
-
Mode : Off
-
-
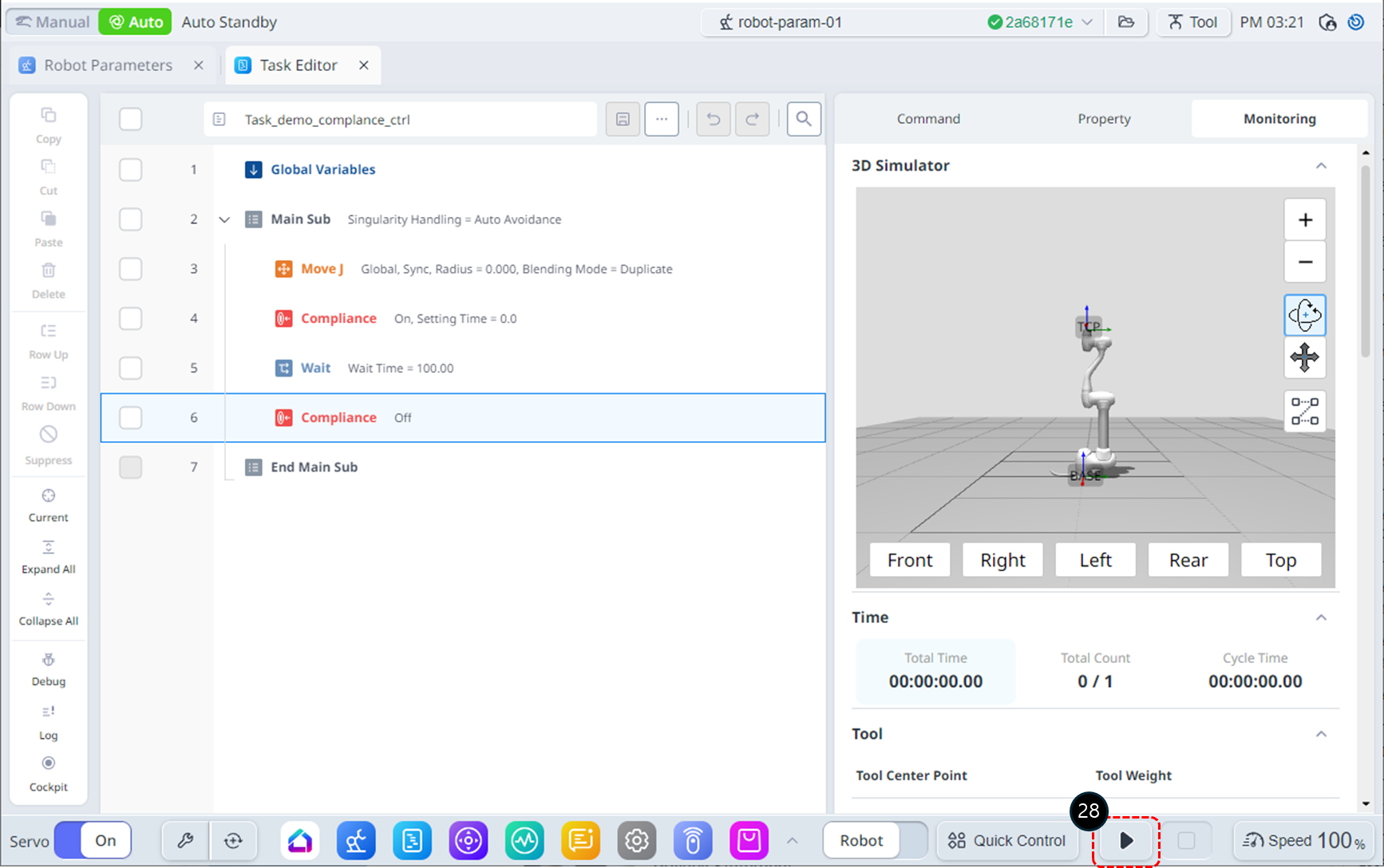
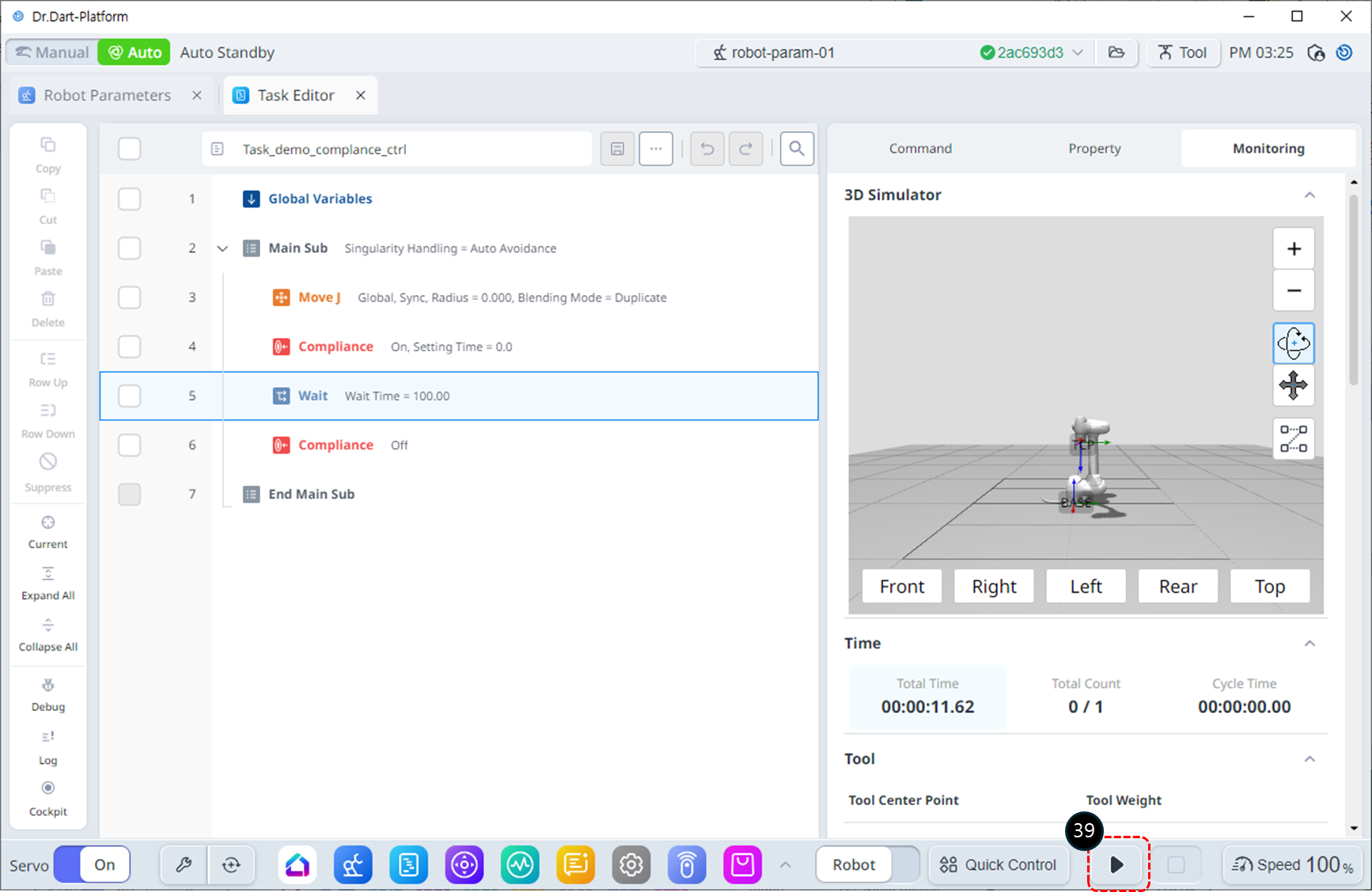
로봇의 동작 Mode를 Auto로 변경하십시오. 그러면 속성 탭은 자동으로 Monitering 탭으로 전환됩니다.
-
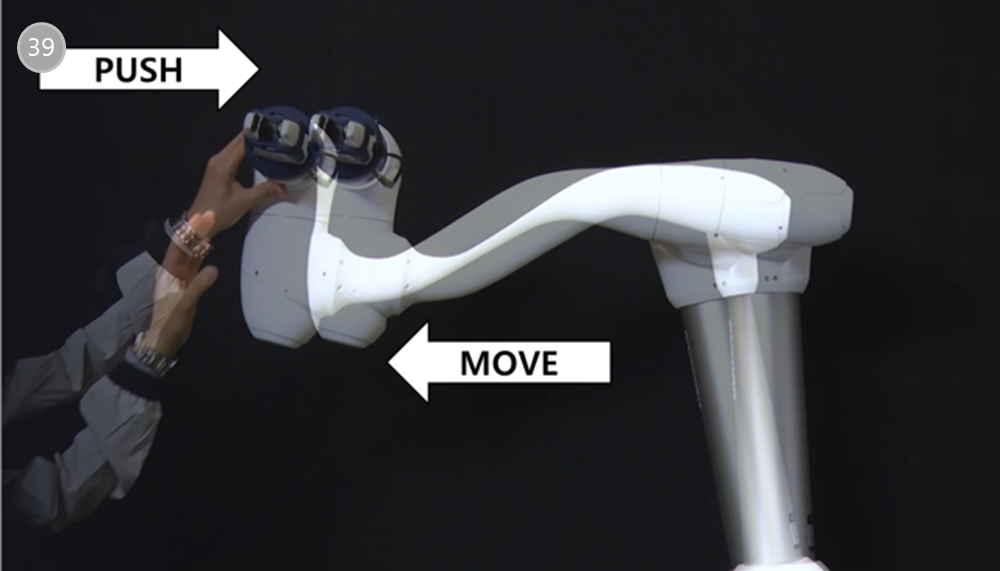
실행 버튼을 누르십시오. 그러면 로봇은 시작 위치로 이동 후 compliance control을 시작하고 100초간 정지해 있습니다. 이때 로봇의 끝단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇은 충돌 에러(혹은 TCP Force Limit 에러)가 발생하면서 멈추게 됩니다.
-
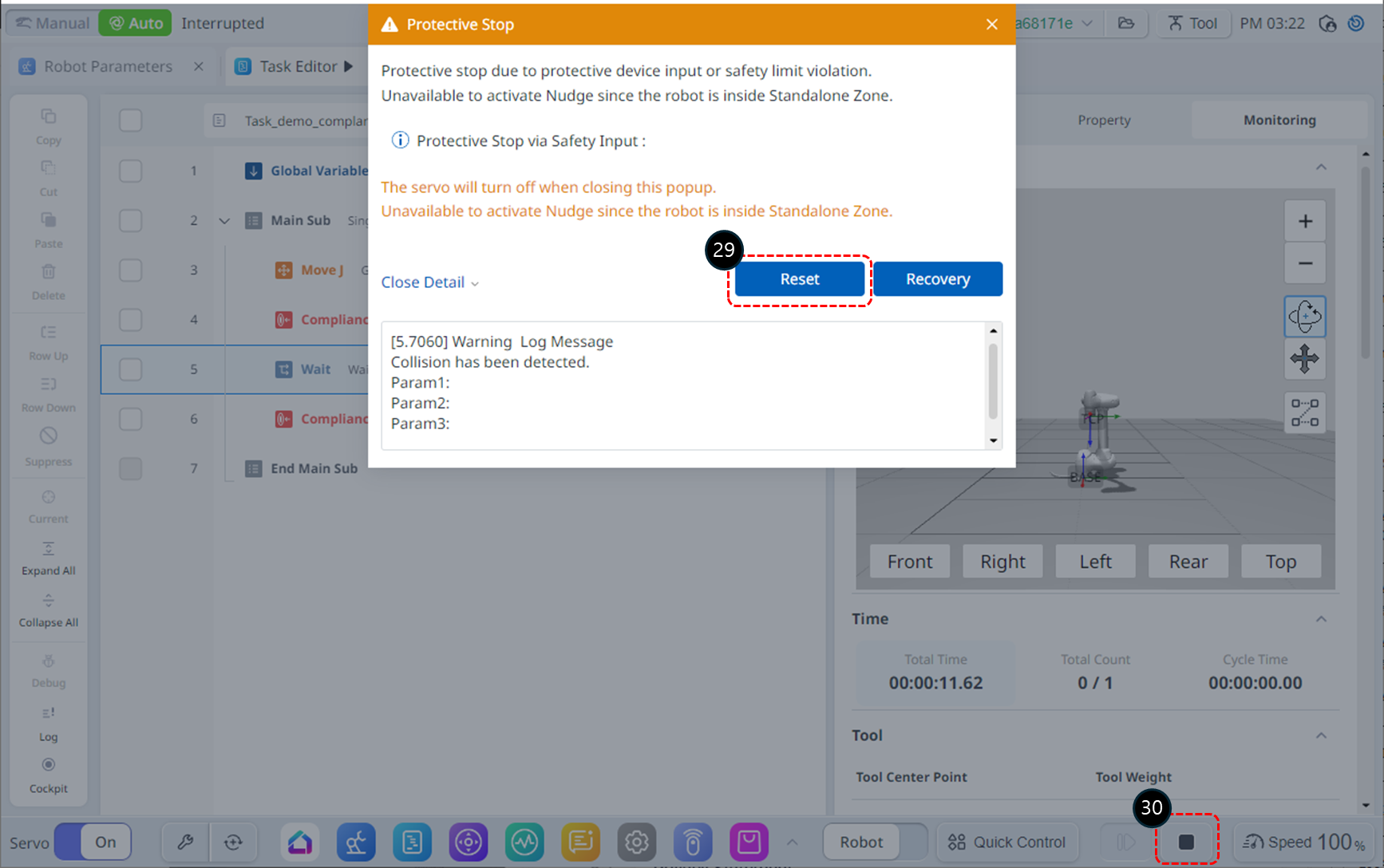
안전 정지 경고 창에서 Reset 버튼을 누르십시오. 태스크 프로그램이 다시 동작합니다.
-
정지 버튼을 눌러 프로그램을 종료 하십시오.
-
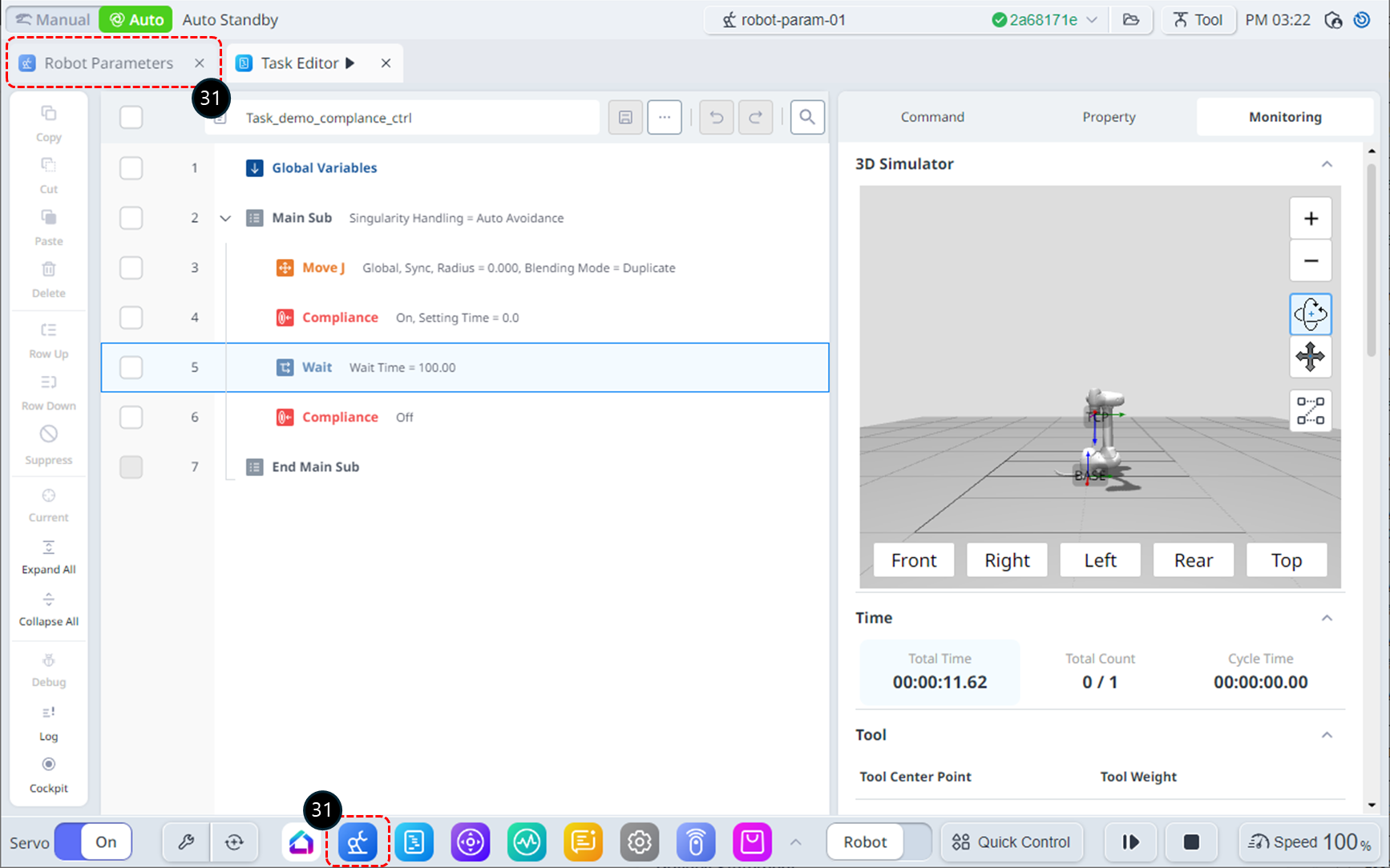
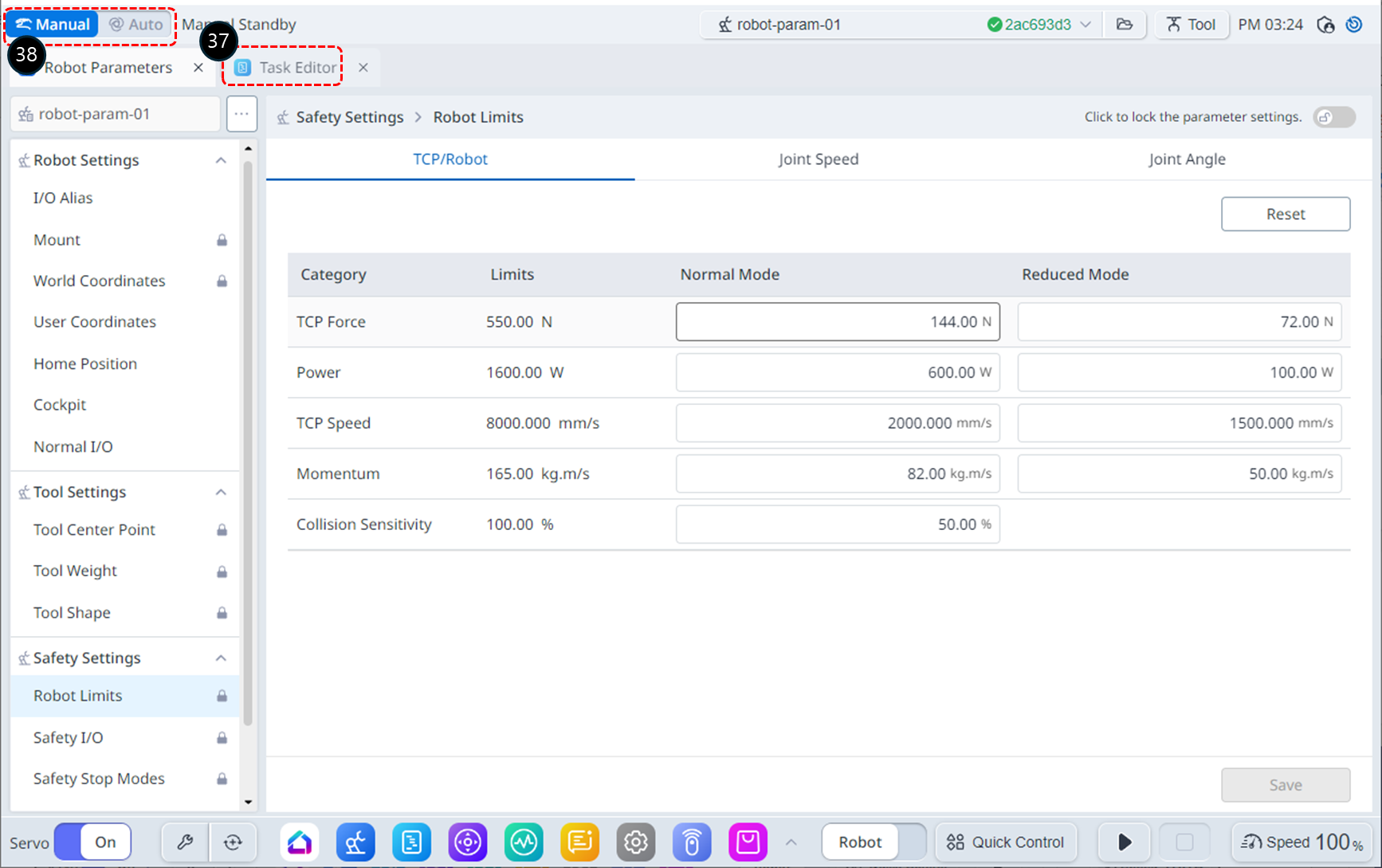
충돌 문제 해결을 위해서는 안전 설정 중 충돌 민감도(Collision Sensitivity)를 낮춰야 합니다.(TCP Force Limit 문제가 있을 경우에는 TCP Force 항목을 높여야함) 하단 메뉴에서 Robot Parameters 모듈을 선택하십시오. 혹은 왼쪽 상단의 Robot parameters 모듈 탭을 선택해도 동일 합니다.
-
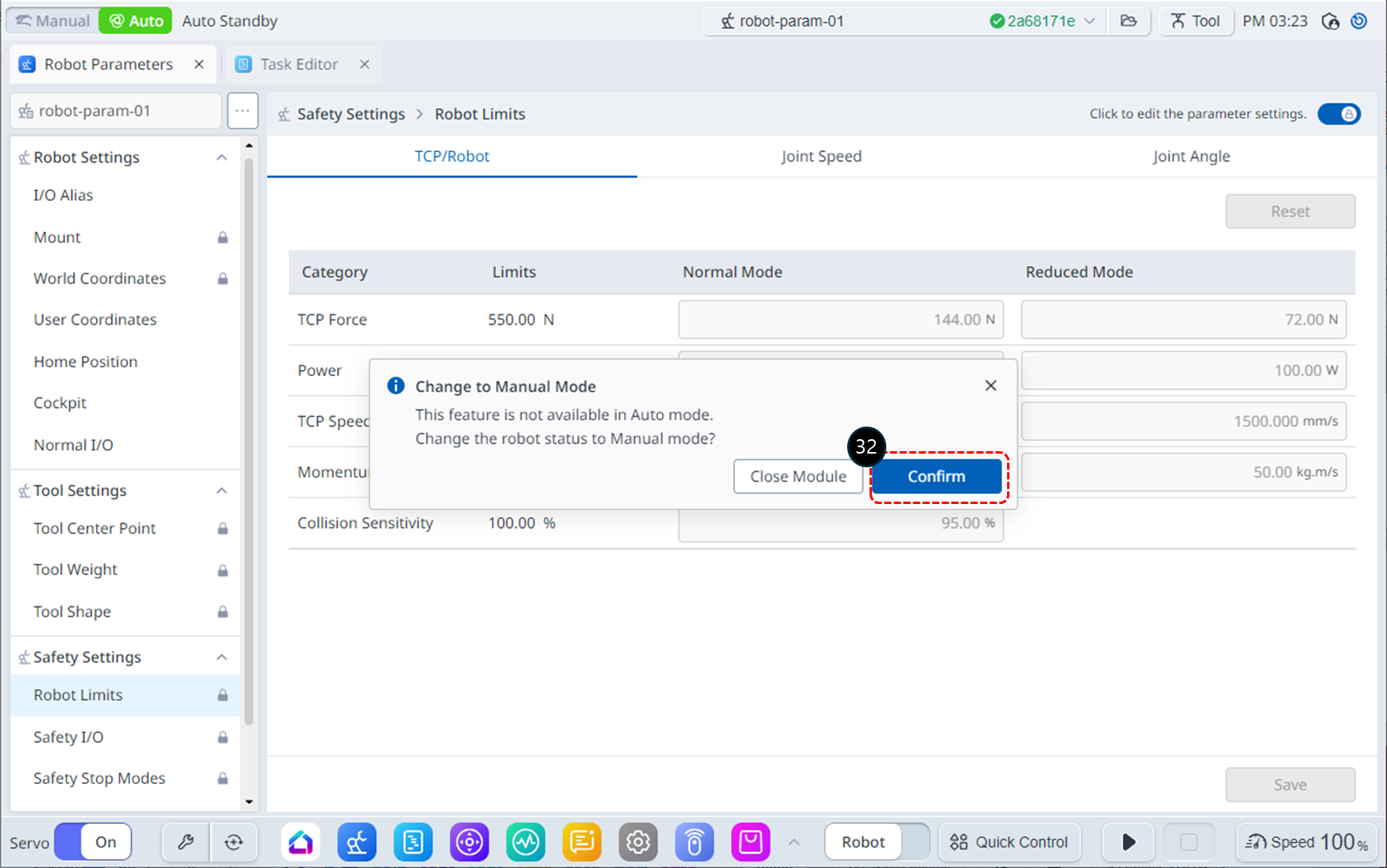
Auto mode에서 Robot parameters 모듈에 접근하여 알림 창이 뜹니다. 확인(Confirm) 버튼을 눌러서 Manual mode로 전환하십시오.
-
Safety Settings의 Robot Limits를 선택하십시오.
-
파라미터 편집 가능 상태를 활성화 하십시오. 비밀번호 입력창이 나올 시에는 6~7의 순서를 확인하십시오.
-
충돌 민감도(Collision Sensitivity)를 50%로 수정하십시오.
-
설정 저장(Save) 버튼을 누르십시오. 이후 Robot Parameters Review 창이 나올 시에는 수정사항을 확인하신 후에 적용(Apply) 버튼을 누르십시오.
-
Task Editor 모듈 탭을 선택하십시오.
-
Task Program 실행을 위해 Auto mode로 변경하십시오.
-
실행 버튼을 누르십시오. wait 시간 동안 로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇이 미는 힘에 의해 이동했다가 손을 떼면 다시 원래 위치로 복귀합니다.