메뉴 구성
|
|
항목 |
설명 |
|---|---|---|
|
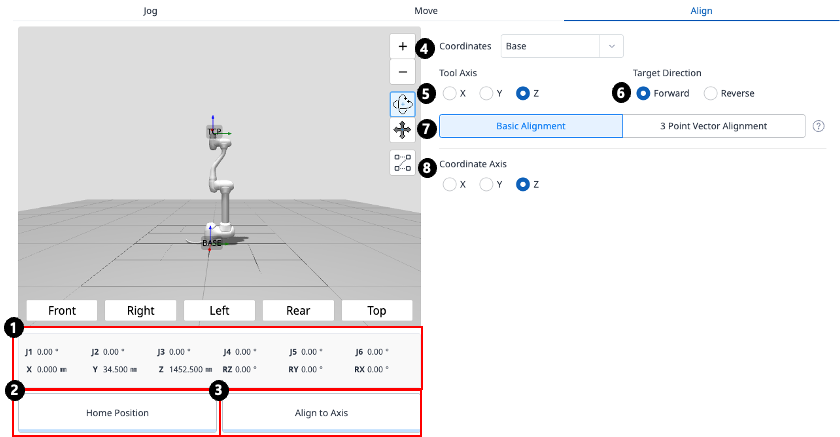
1 |
로봇 자세 |
현재 로봇의 조인트 자세와 태스크 자세를 표시합니다. 태스크 자세의 경우 4번에서 선택한 기준 좌표계에 따릅니다. |
|
2 |
홈 포지션 버튼 |
버튼 클릭 시 홈 포지션으로 이동합니다. |
|
3 |
정렬 버튼 |
버튼 클릭 시 정렬합니다. |
|
4 |
기준 좌표계 선택 |
포지션의 기준 좌표계를 선택합니다. |
|
5 |
툴 축 |
TCP의 어떤 축을 정렬 시킬지 선택합니다. |
|
6 |
목표 방향 |
정렬 시킬 때의 방향을 선택합니다. |
|
7 |
정렬 방법 선택 |
정렬 방법을 선택합니다. 기본 정렬의 경우, 기준 좌표계의 X, Y, Z 축 중 하나 와 정렬합니다. 3 포인트 벡터 정렬의 경우, 기준 좌표계 기준으로 표현된 세 점으로 이루어진 평면의 법선 벡터 방향으로 정렬합니다. |
|
8 |
좌표 축 |
기준 좌표계의 어떤 축과 정렬할 것인지 선택합니다. |
|
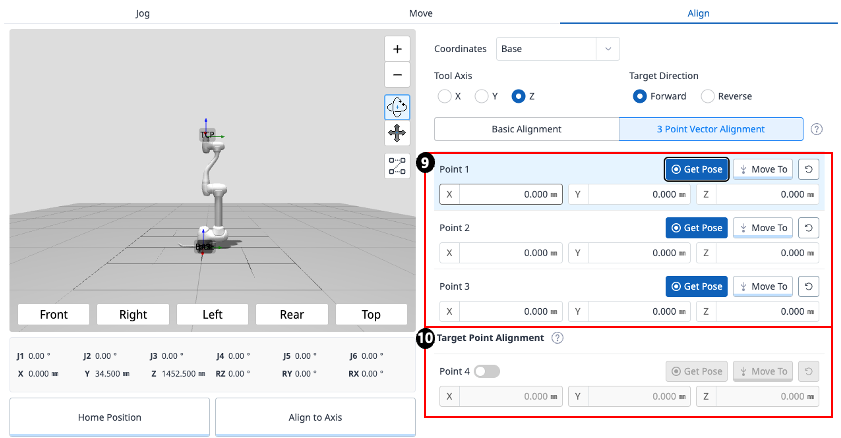
9 |
평면의 점 선택 |
평면을 정의할 세 점을 선택합니다. 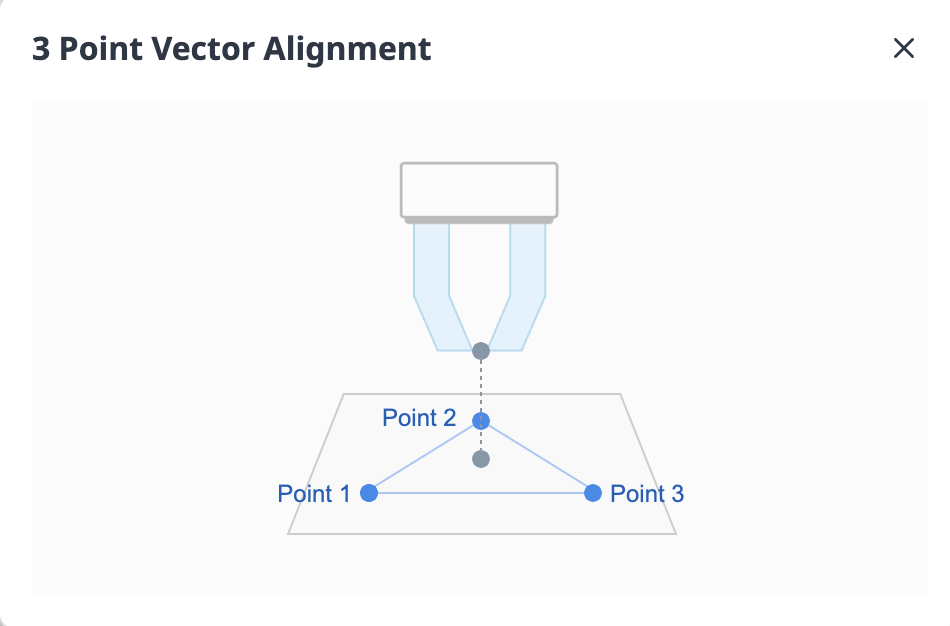
|
|
10 |
목표점 정렬 |
TCP를 위치 시킬 점을 선택합니다. 옵션이며, 사용하지 않을 경우 현재 위치에서 방향만 정렬 됩니다. |
메뉴 구성
|
|
항목 |
설명 |
|---|---|---|
|
1 |
로봇 자세 |
현재 로봇의 조인트 자세와 태스크 자세를 표시합니다. 태스크 자세의 경우 4번에서 선택한 기준 좌표계에 따릅니다. |
|
2 |
홈 포지션 버튼 |
버튼 클릭 시 홈 포지션으로 이동합니다. |
|
3 |
정렬 버튼 |
버튼 클릭 시 정렬합니다. |
|
4 |
기준 좌표계 선택 |
포지션의 기준 좌표계를 선택합니다. |
|
5 |
툴 축 |
TCP의 어떤 축을 정렬 시킬지 선택합니다. |
|
6 |
목표 방향 |
정렬 시킬 때의 방향을 선택합니다. |
|
7 |
정렬 방법 선택 |
정렬 방법을 선택합니다. 기본 정렬의 경우, 기준 좌표계의 X, Y, Z 축 중 하나 와 정렬합니다. 3 포인트 벡터 정렬의 경우, 기준 좌표계 기준으로 표현된 세 점으로 이루어진 평면의 법선 벡터 방향으로 정렬합니다. |
|
8 |
좌표 축 |
기준 좌표계의 어떤 축과 정렬할 것인지 선택합니다. |
|
9 |
평면의 점 선택 |
평면을 정의할 세 점을 선택합니다.
|
|
10 |
목표점 정렬 |
TCP를 위치 시킬 점을 선택합니다. 옵션이며, 사용하지 않을 경우 현재 위치에서 방향만 정렬 됩니다. |