주의
예제를 시작하기 전에 반드시 주의사항을 확인하십시오. 자세한 내용은 PART 1. 안전 매뉴얼을 참조하십시오.
알아두기
이 예제는 순응(Compliance) 명령어 예제 따라하기에서 작성된 태스크 파일이 요구됩니다.
-
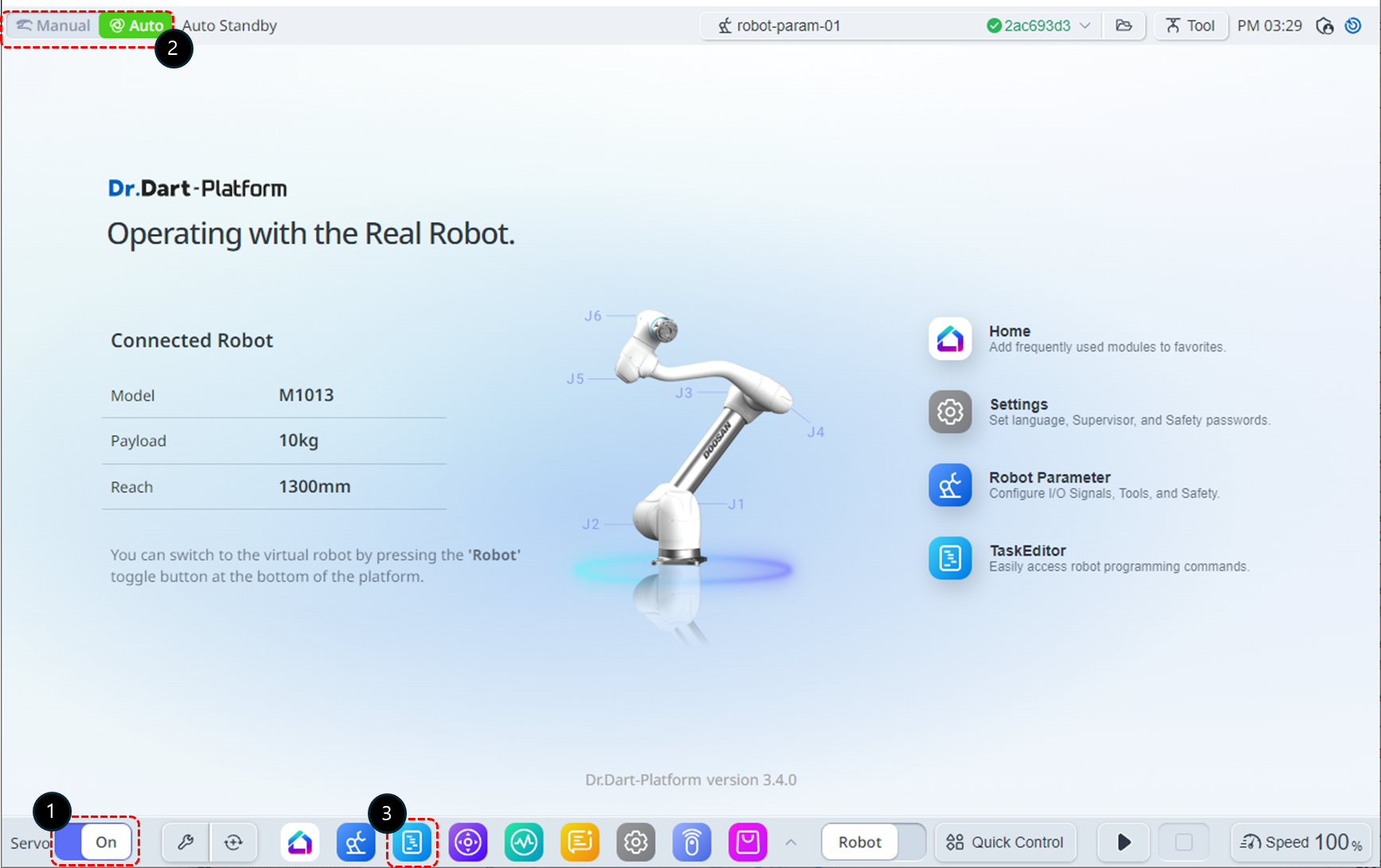
로봇의 Servo 상태를 On으로 변경하십시오.
-
로봇의 동작 Mode를 Manual로 변경하십시오.
-
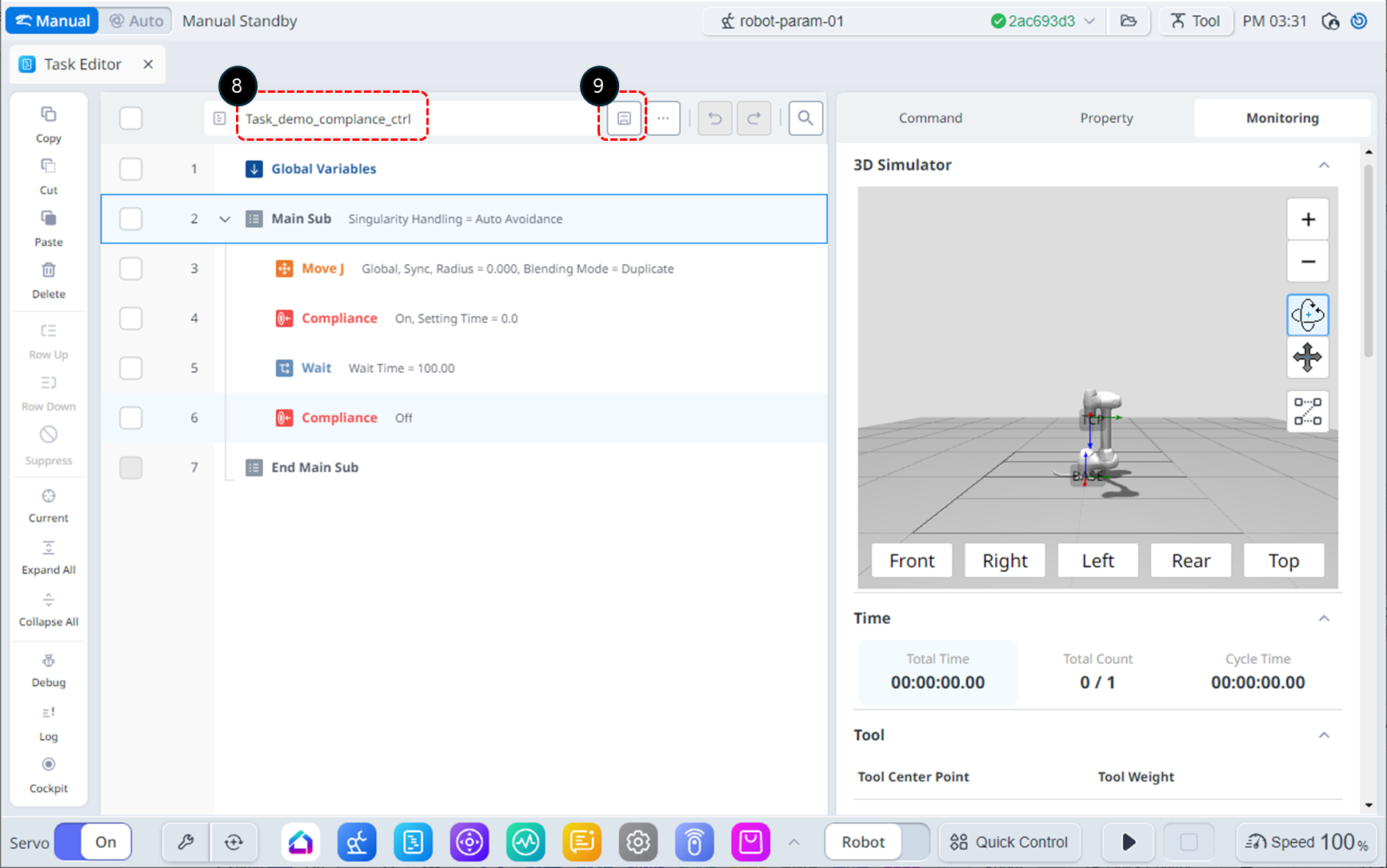
하단 메뉴에서 Task Editor 모듈을 선택하십시오.
-
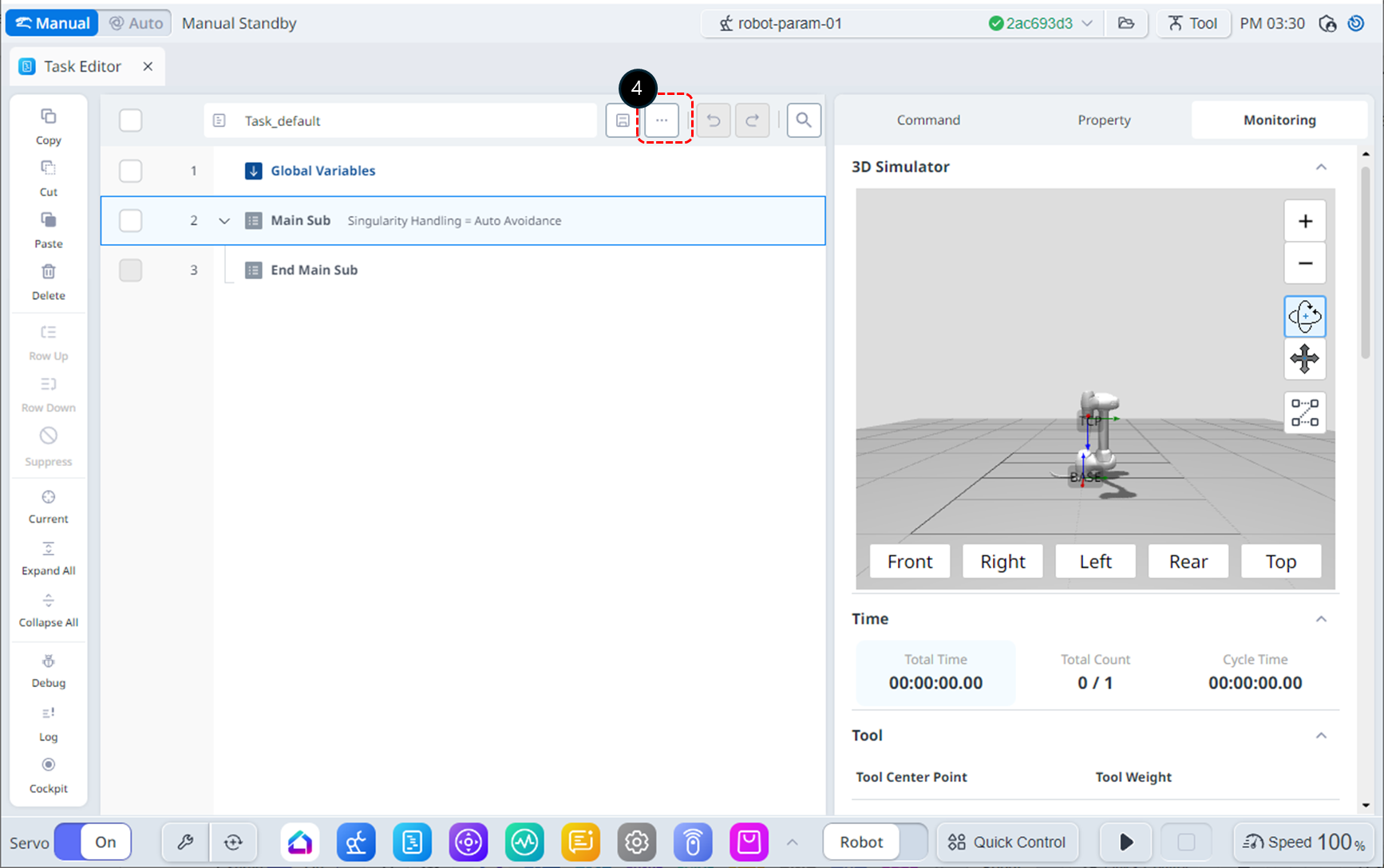
파일 버튼을 누르십시오.
-
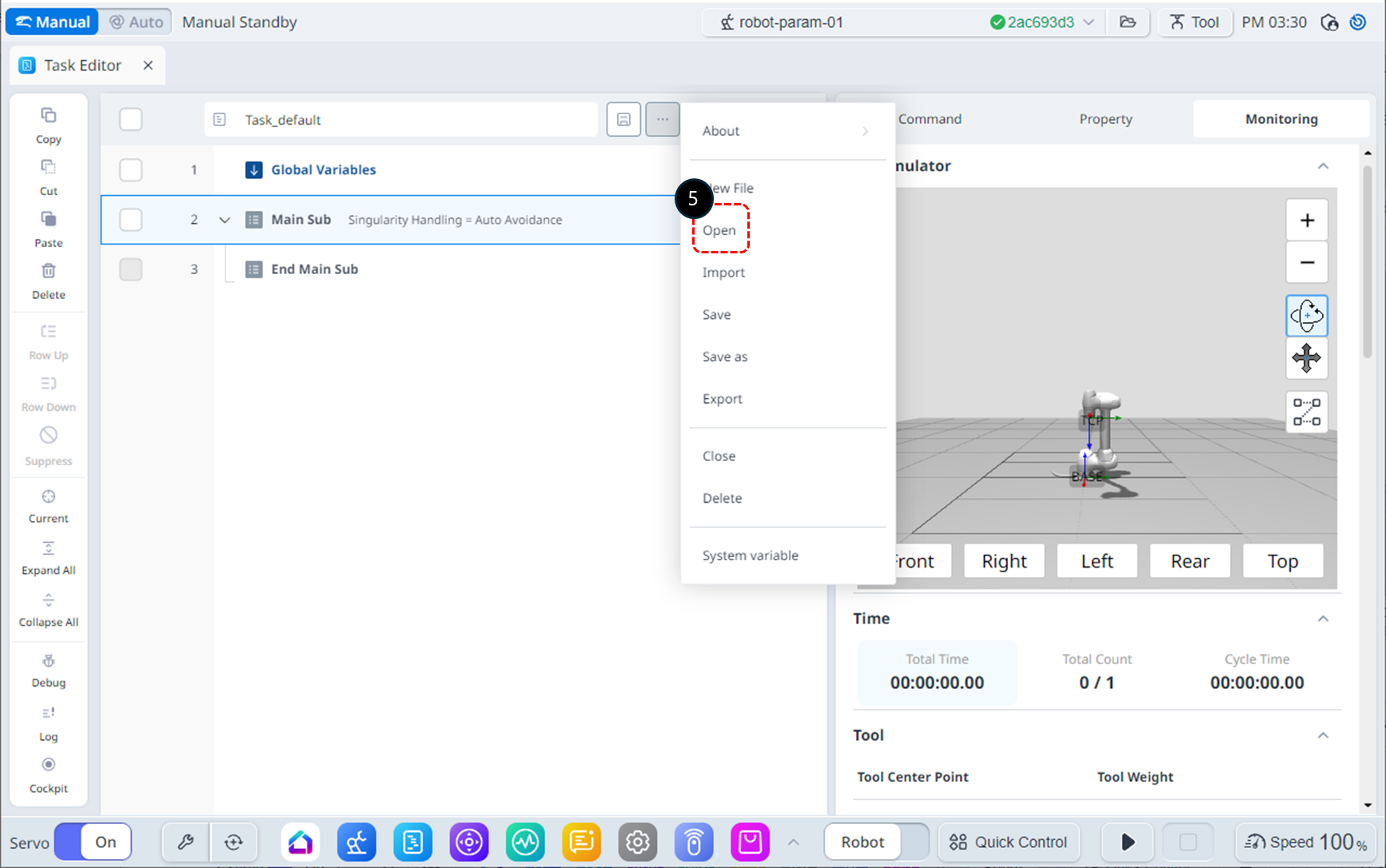
Open 버튼을 누르십시오.
-
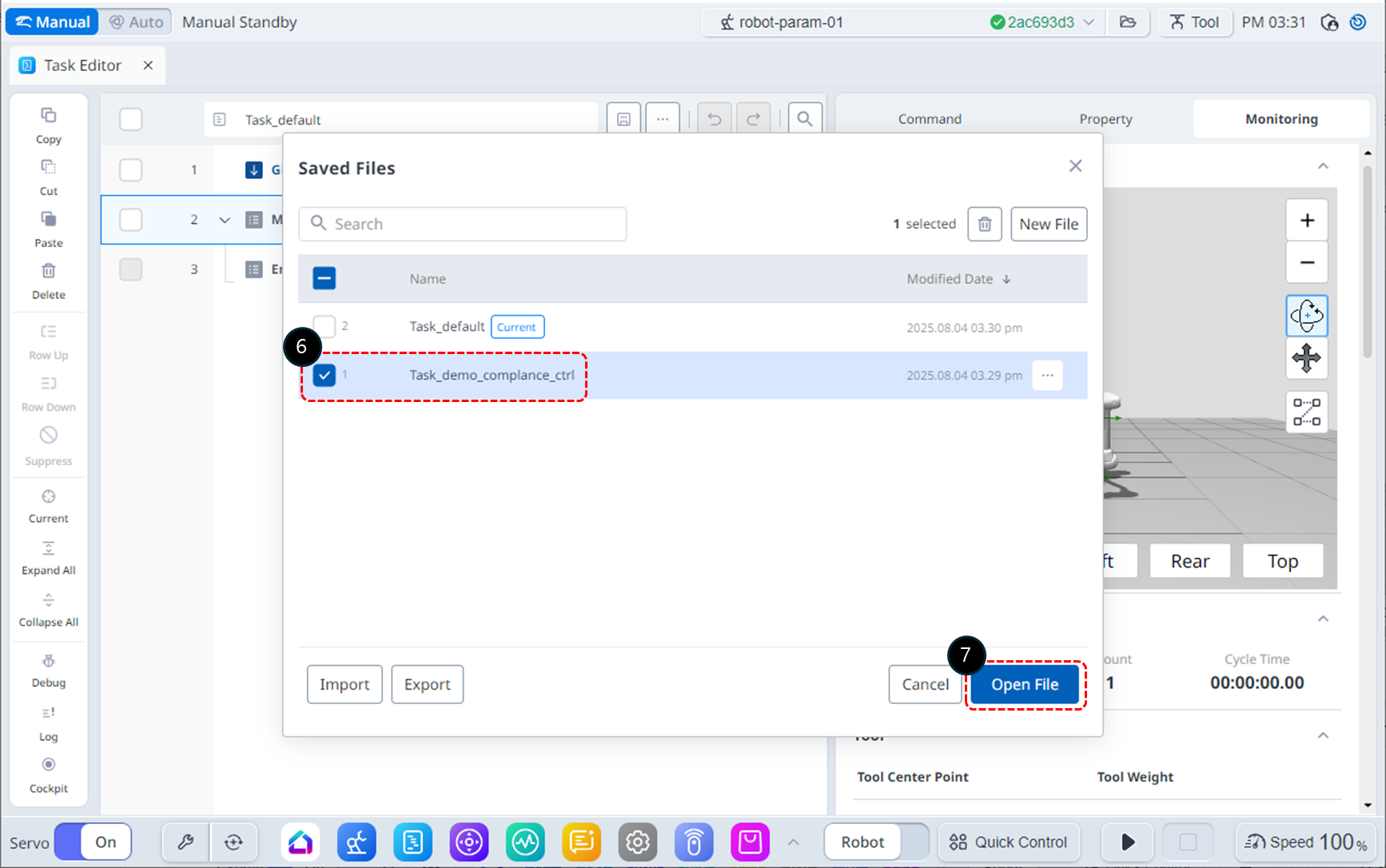
순응(Compliance) 명령어 예제 따라하기에서 작성한 Task_demo_compliance_ctrl 파일을 선택하십시오.
-
Open File 버튼을 누르십시오.
-
파일 이름을 Task_demo_force_ctrl로 변경하십시오.
-
저장 버튼을 눌러 파일 이름을 저장 하십시오.
-
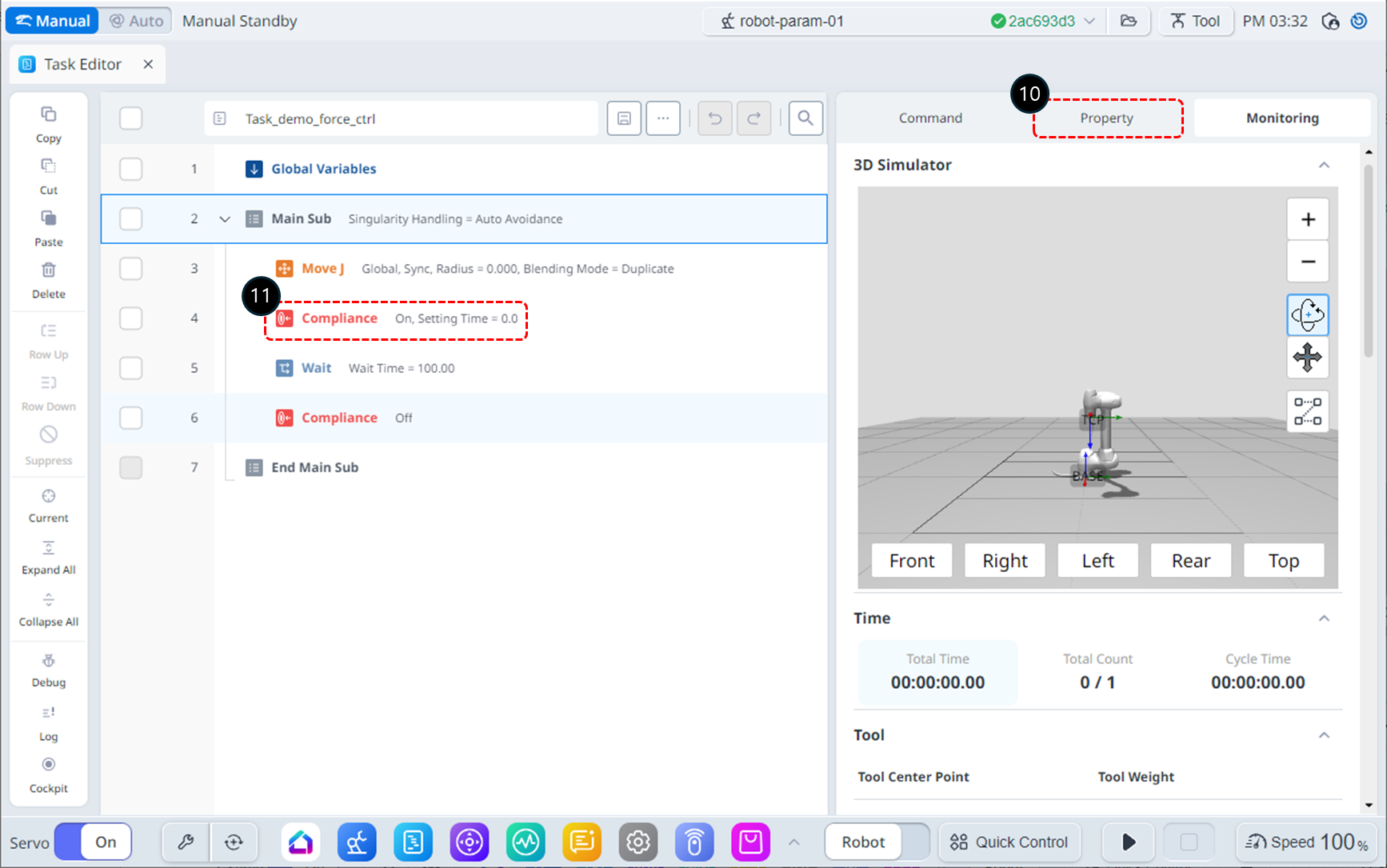
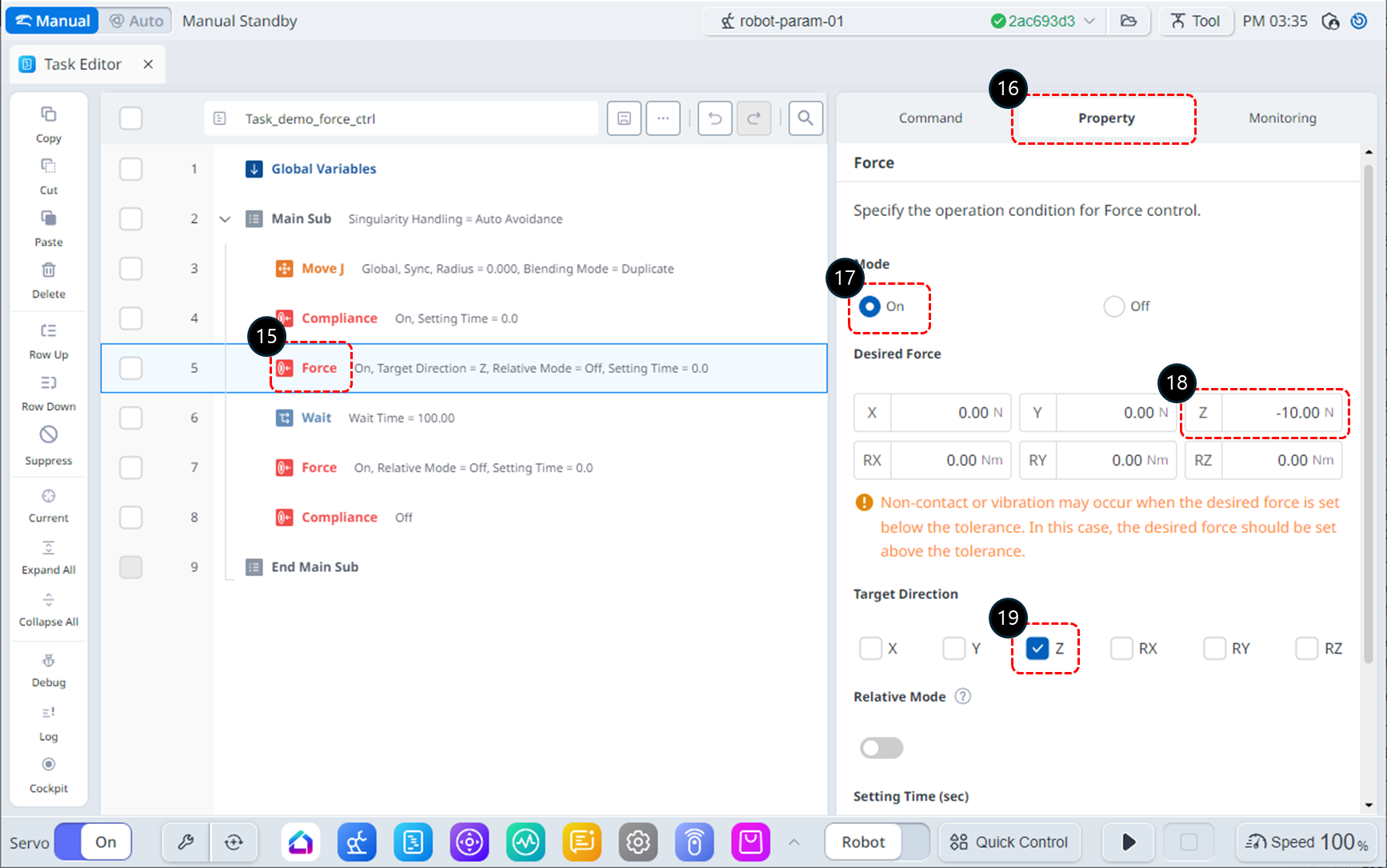
속성(Property) 탭을 선택하십시오.
-
4번째 줄의 Compliance 명령어를 선택하십시오.
-
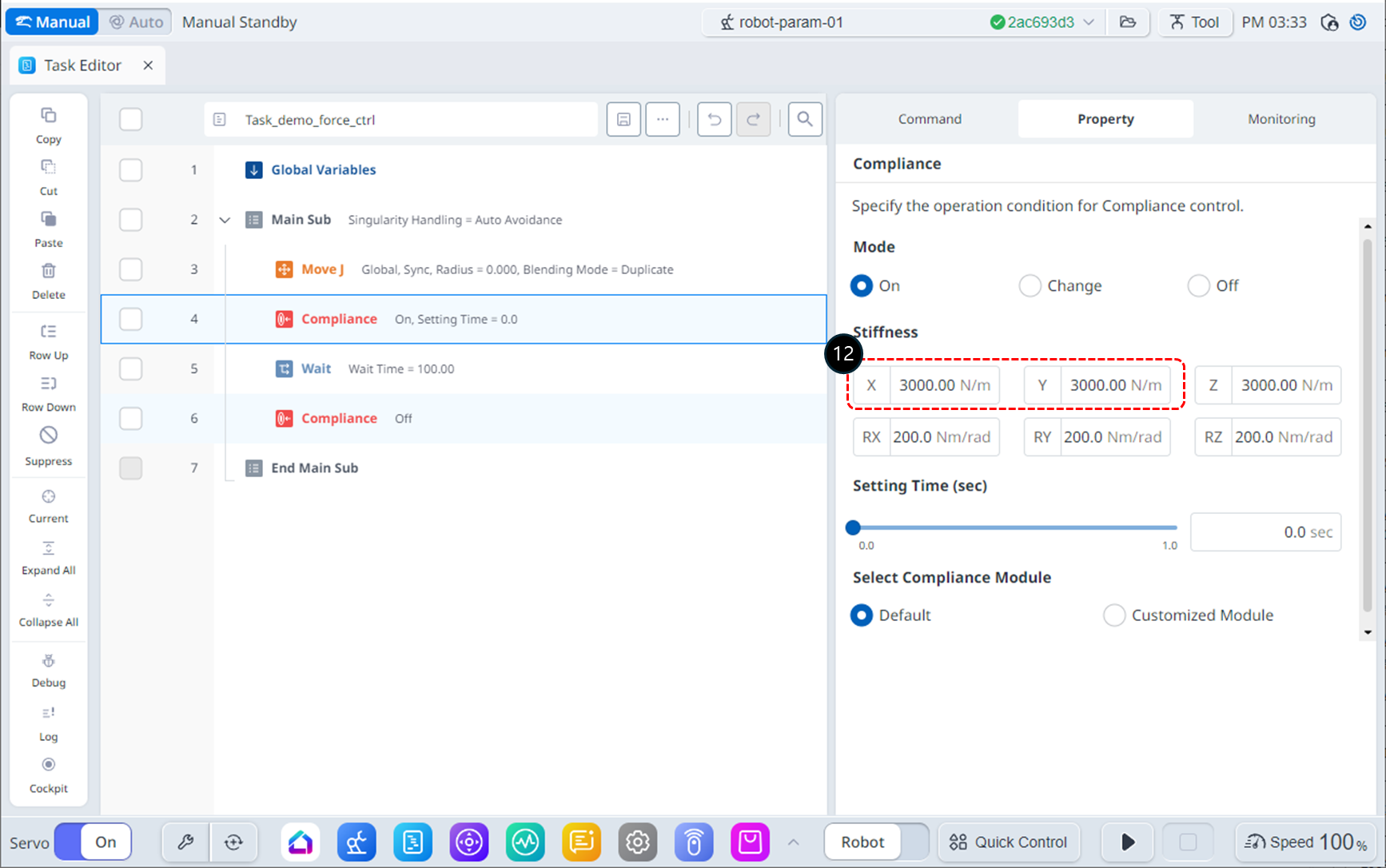
강성(Stiffness)을 다음과 같이 기본 값으로 설정합니다.
-
X, Y, Z : 3000 N/m (default)
-
Rx, Ry, Rz : 200 Nm/rad (default)
-
-
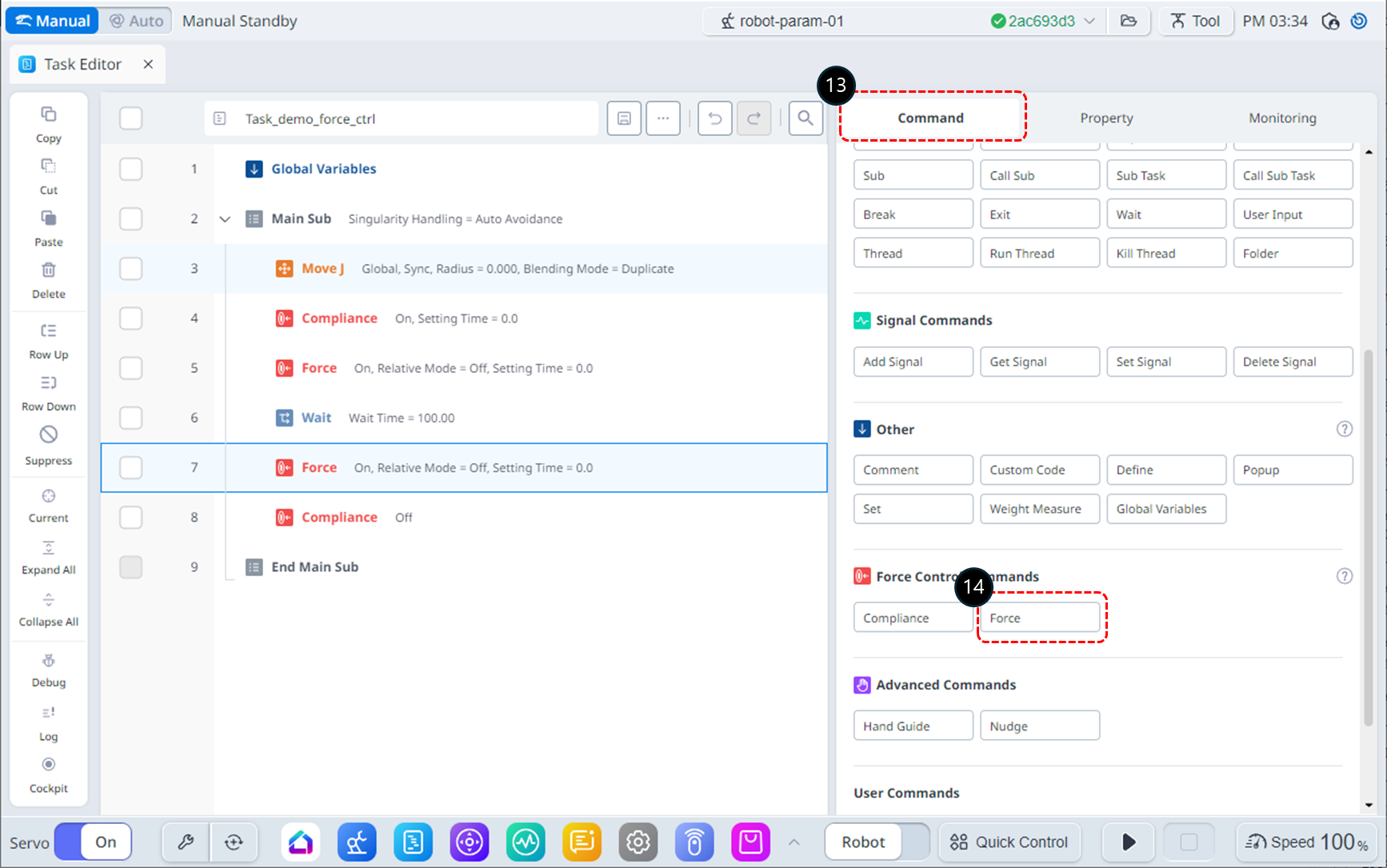
명령어(Command) 탭을 선택하십시오.
-
5번째 줄과 7번째 줄에 Force 명령어를 추가하십시오. 이 명령어는 힘 제어(Force Control)를 활성화/비활성화하는데 사용될 예정입니다.
-
5번 줄의 Force 명령어를 선택하십시오.
-
속성(Property) 탭을 선택하십시오.
-
모드(Mode)를 다음과 같이 설정합니다. Mode On은 힘 제어를 활성화 합니다.
-
Mode : On
-
-
힘(Desired Force)을 다음과 같이 설정합니다.
-
X : 0 N (default)
-
Y : 0 N (default)
-
Z : -10 N
-
Rx, Ry, Rz : 0 Nm/rad (default)
-
-
방향(Target Direction)에서 z 축만 체크합니다.
-
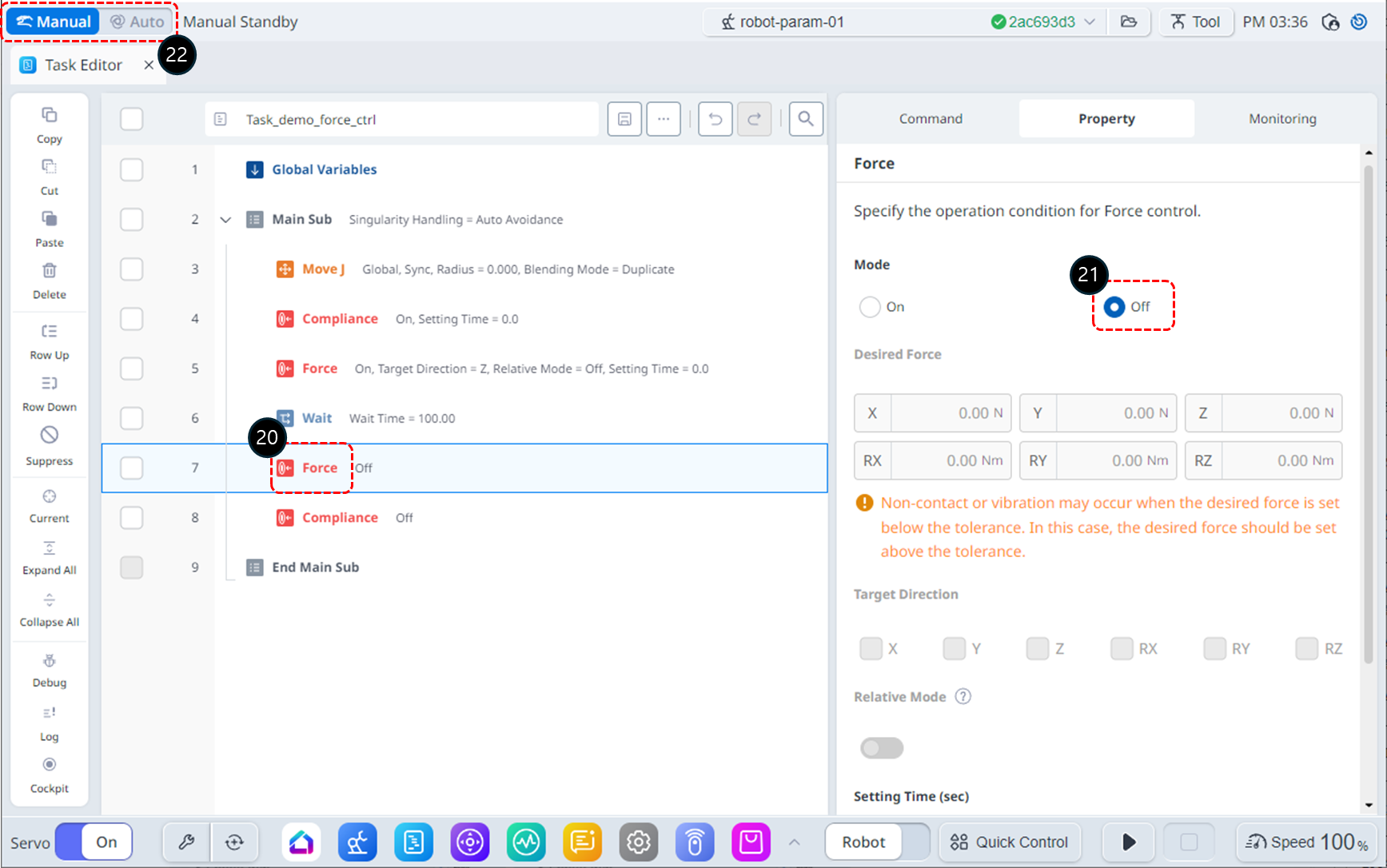
태스크 리스트에서 7번 줄의 Force 명령어를 선택하십시오.
-
모드(Mode)를 다음과 같이 설정합니다. Mode Off는 힘 제어를 비활성화 합니다.
-
Mode : Off
-
-
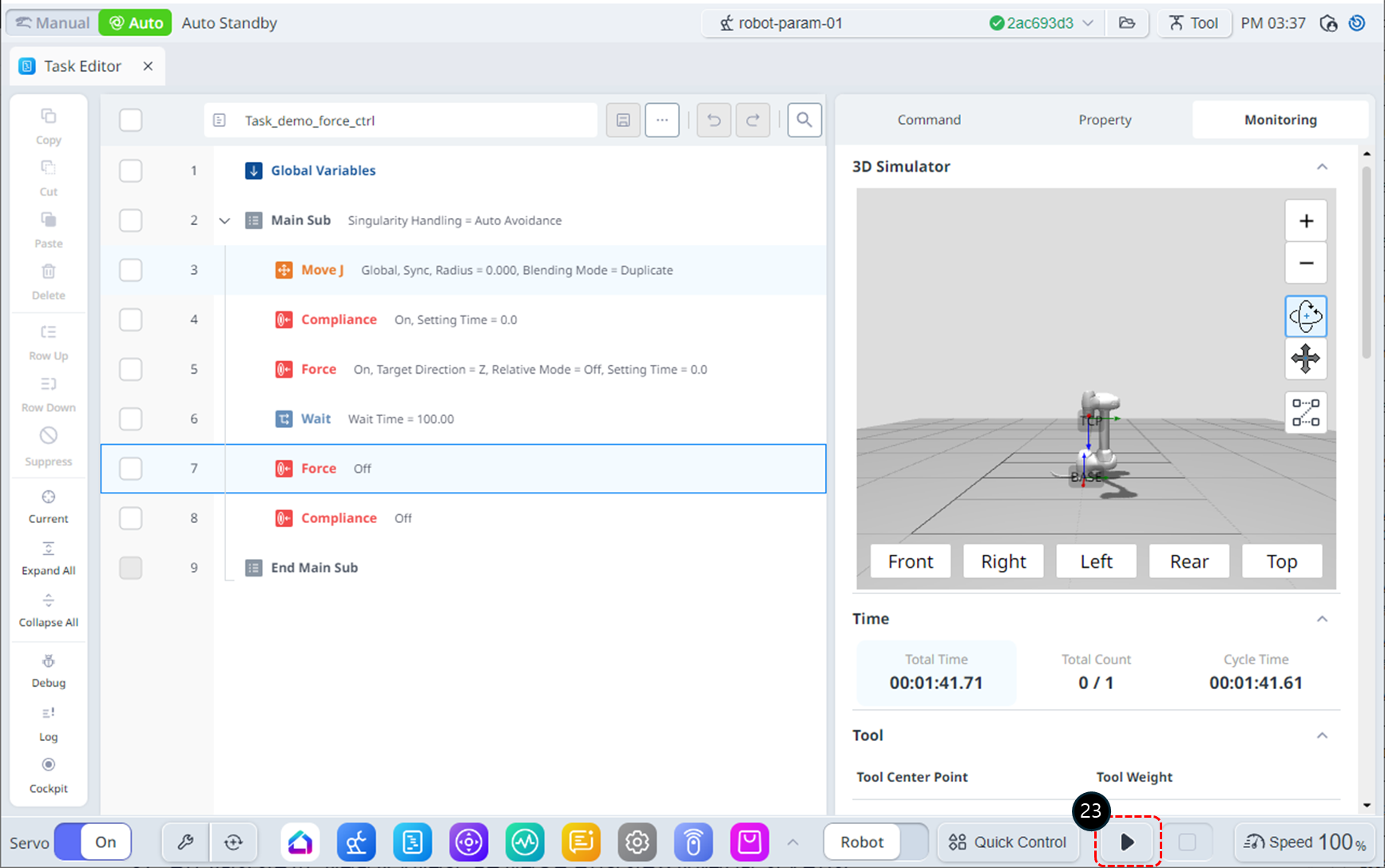
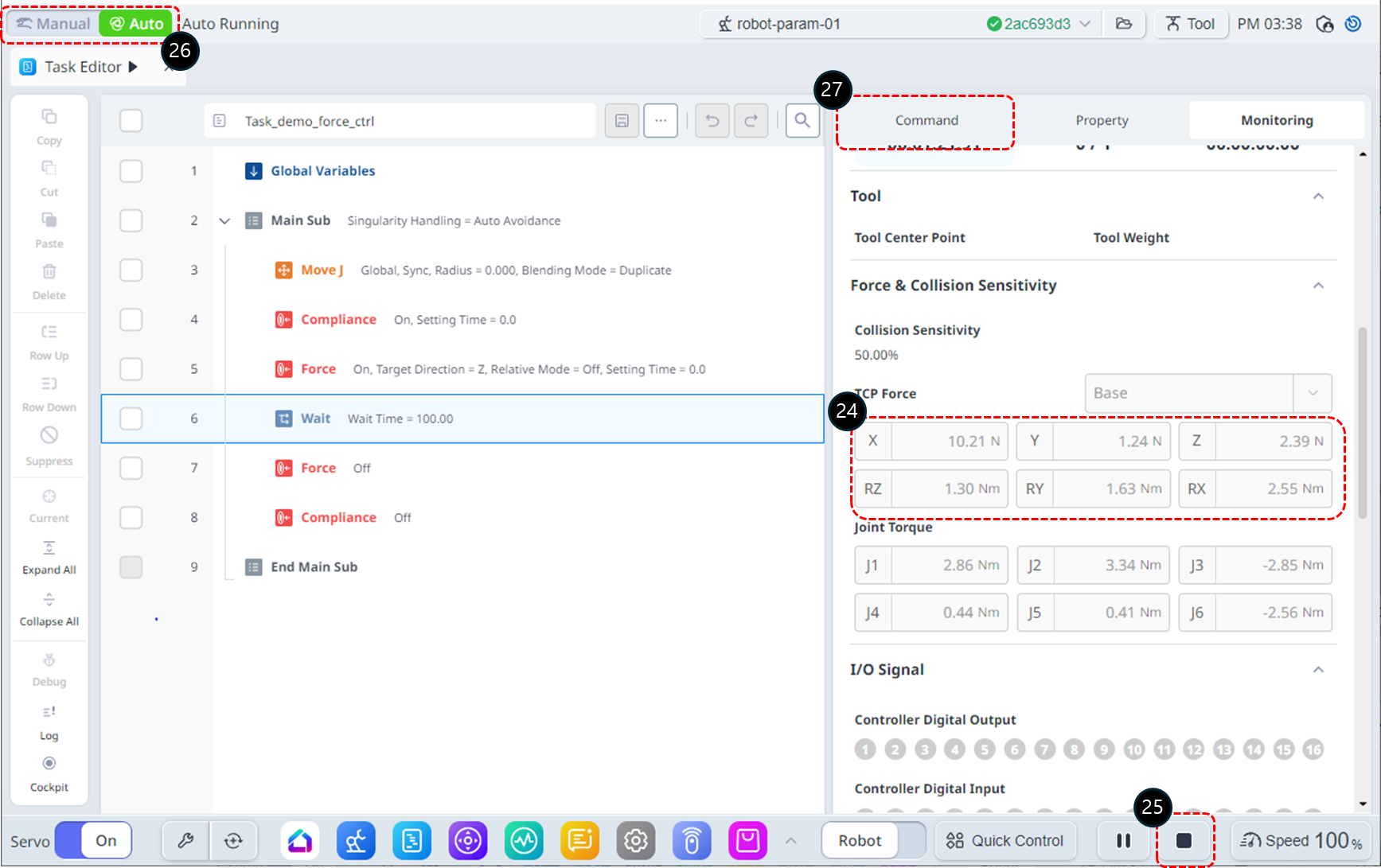
로봇의 동작 Mode를 Auto로 변경하십시오. 그러면 속성 탭은 자동으로 Monitoring 탭으로 전환됩니다.
-
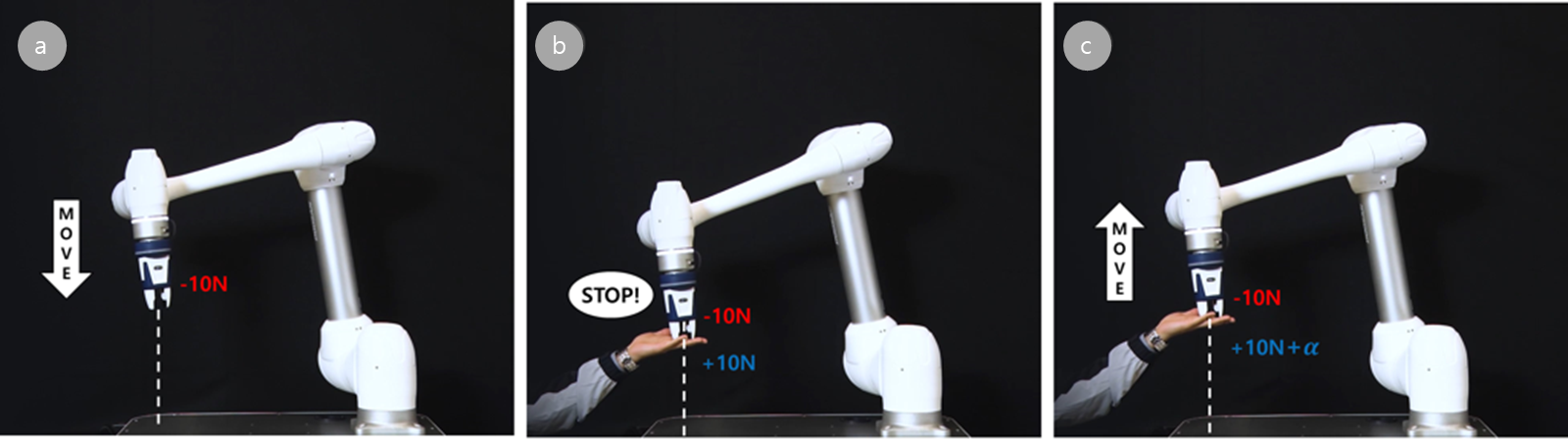
실행 버튼을 누르십시오. 그러면 Wait 상태일 때 로봇은 다음과 같이 동작합니다.
-
로봇 끝단에서 -10N의 힘이 발생하여 로봇이 -Z 축 방향으로 천천히 이동합니다.
-
로봇 끝단이 이동하는 방향과 반대 방향인 +Z축 방향으로 로봇의 이동을 방해합니다. 이때 로봇이 이동하려는 힘과 방해하려는 힘이 균형을 이루면 로봇이 정지한 것처럼 위치를 유지합니다.
-
만약 +10N 보다 더 큰 힘을 로봇에게 가하면 로봇이 힘을 가한 방향으로 이동합니다.
-
-
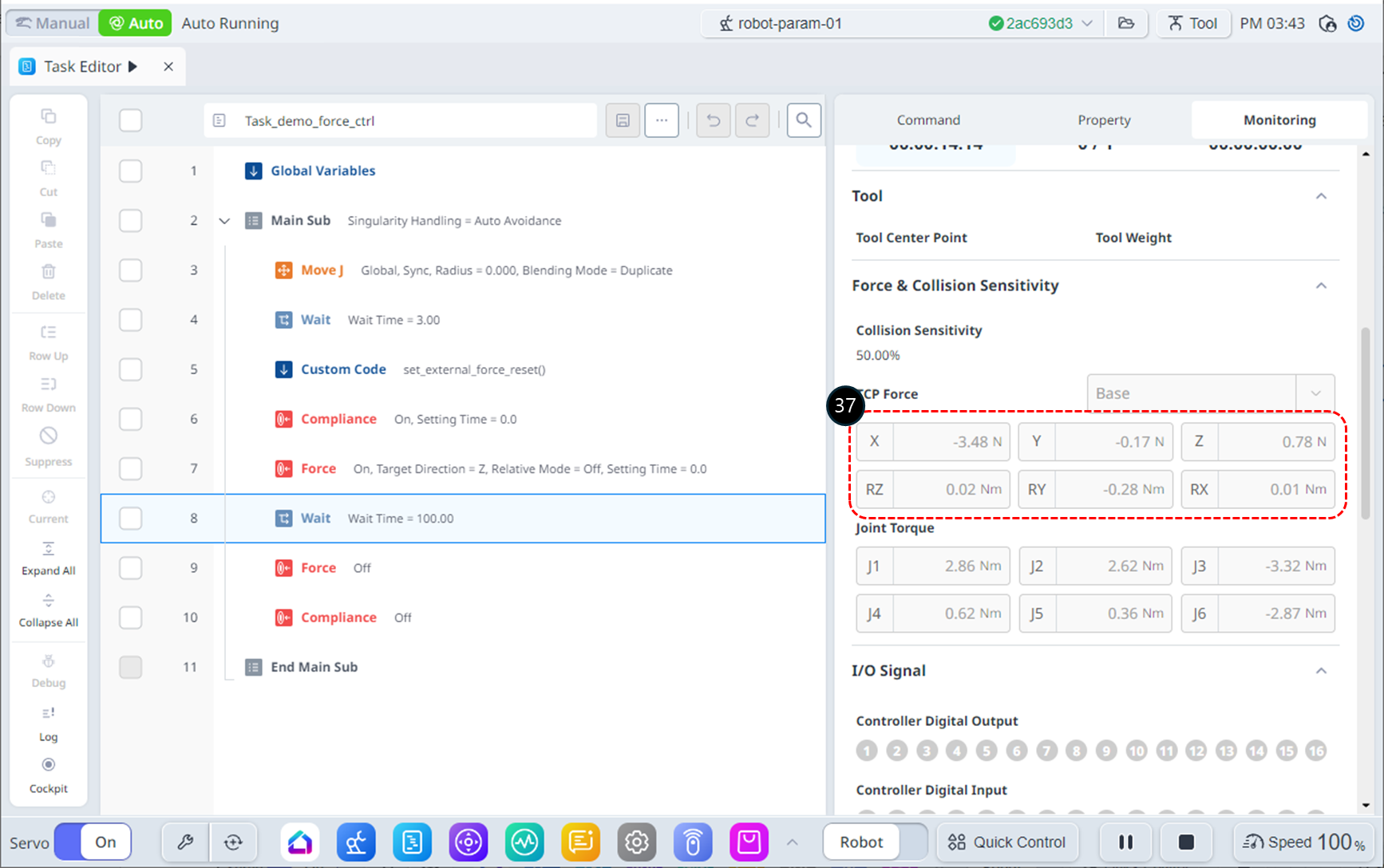
동작 중에 Monitoring 탭의 TCP Force 항목에서 실시간 TCP Force를 확인할 수 있습니다. 로봇 끝단에 힘을 가하지 않으면 TCP Force는 모두 0이여야 하는데 오차 성분이 표기되는 문제를 확인할 수 있습니다. 이를 개선하기 위한 방법을 추가로 설명 드립니다.
-
종료 버튼을 눌러 Task를 종료합니다.
-
Task 수정을 위해 로봇의 동작 Mode를 Manual로 변경하십시오.
-
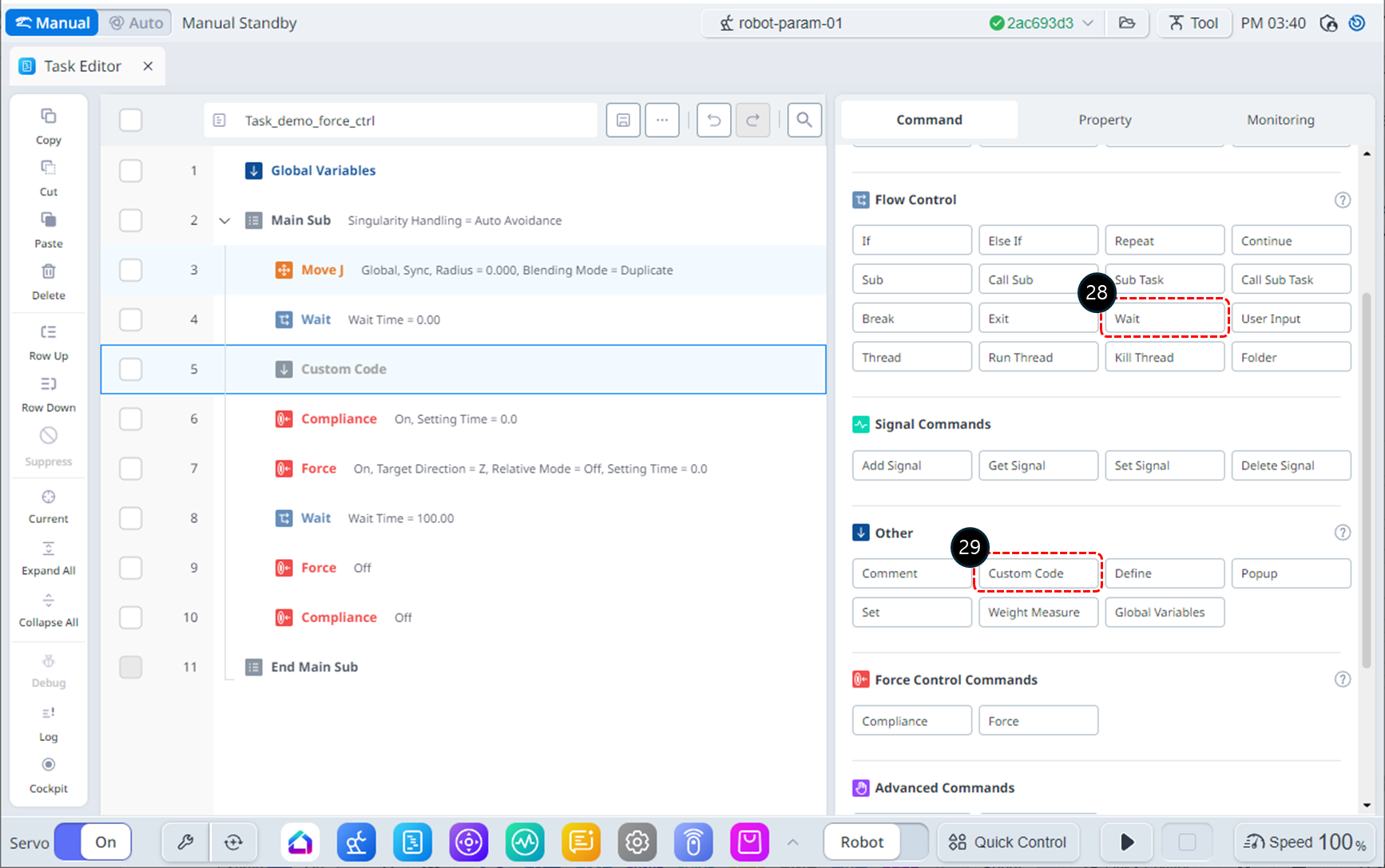
명령어(Command) 탭을 선택하십시오.
-
태스크 리스트의 4번 줄에 Wait 명령어를 추가하십시오.
-
태스크 리스트의 5번 줄에 Custom Code 명령어를 추가하십시오.
-
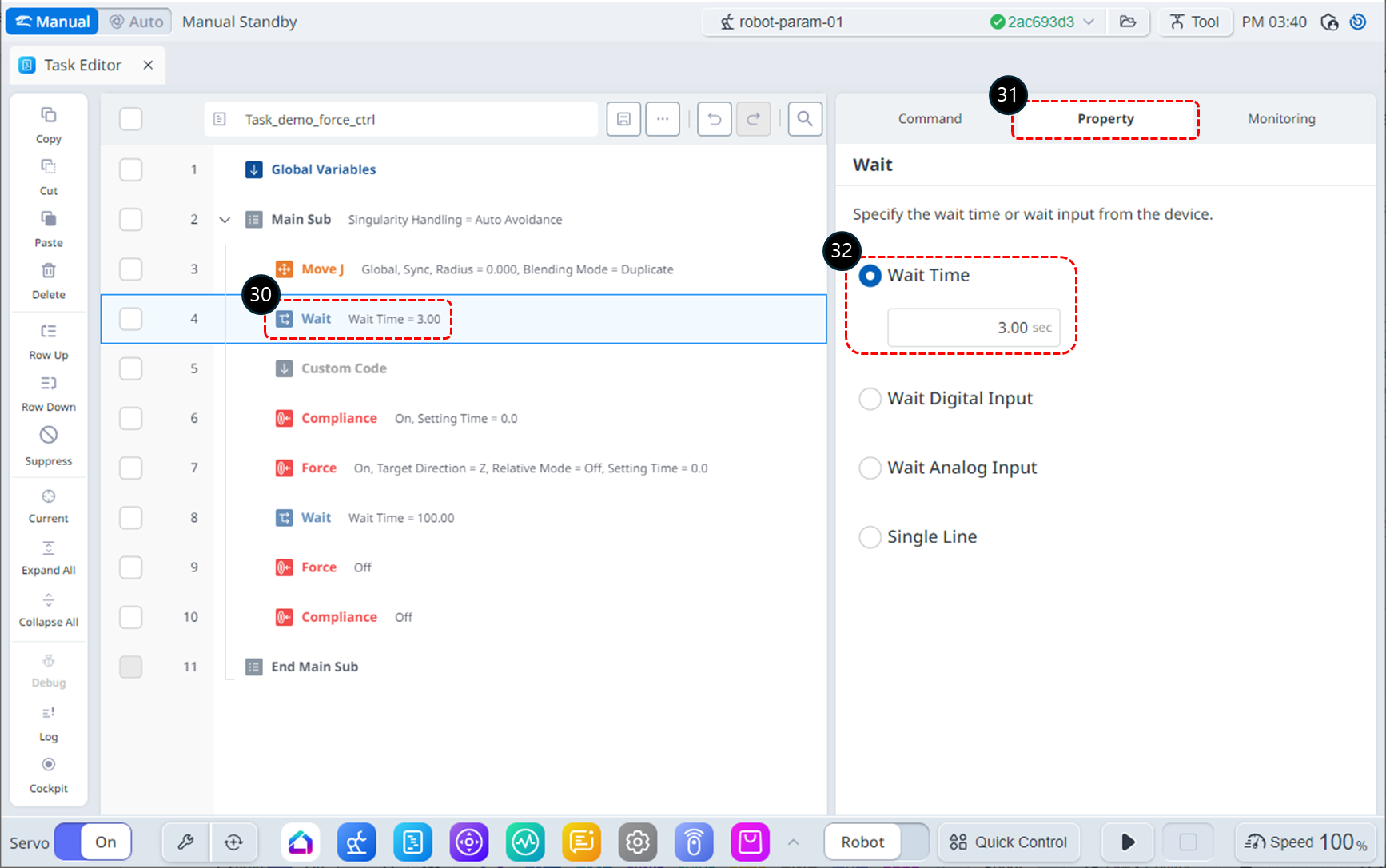
4번 줄의 Wait 명령어를 선택하십시오.
-
속성(Property) 탭을 선택하십시오.
-
Wait Time을 다음과 같이 설정합니다.
-
Wait Time : 3 sec
-
-
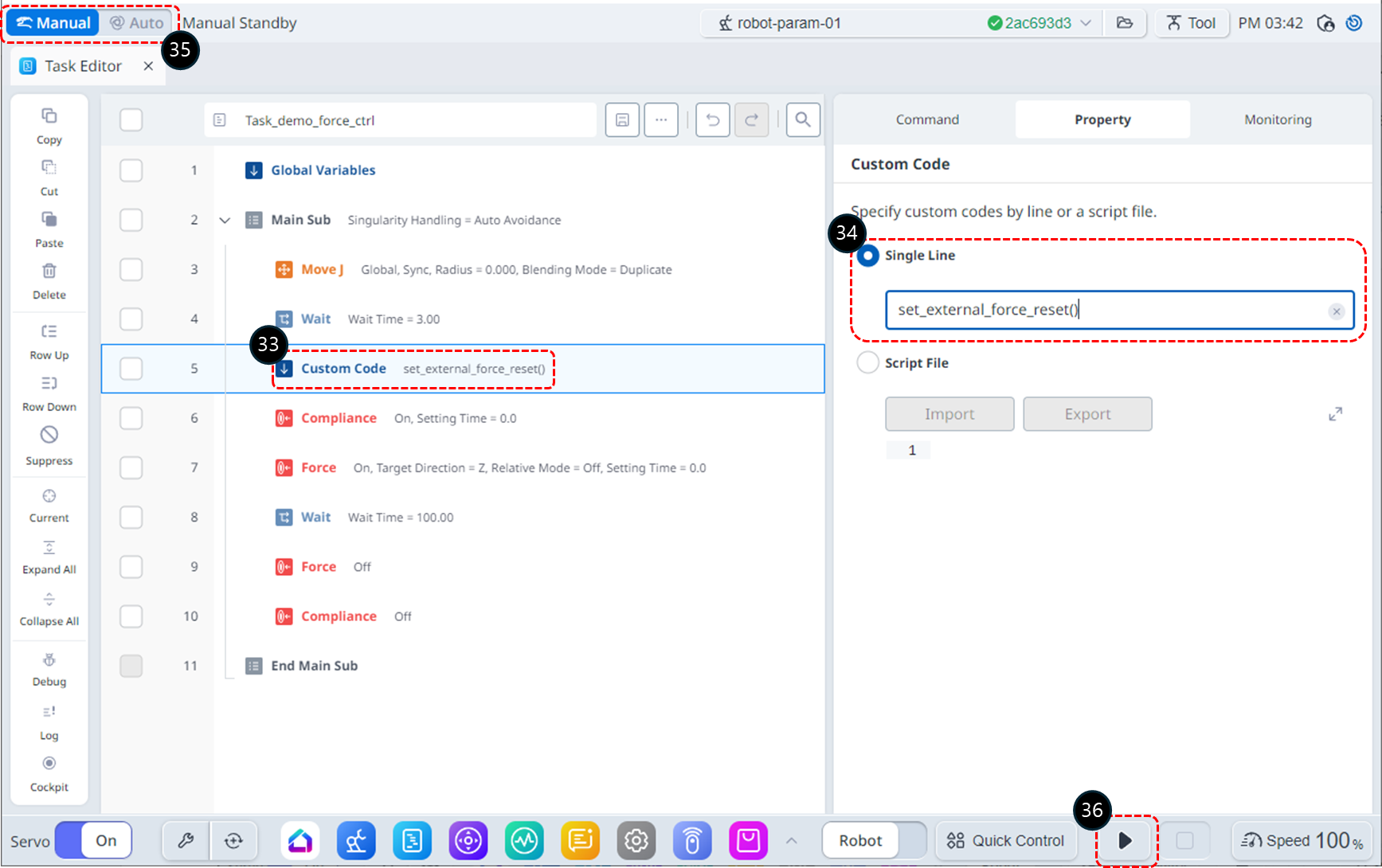
5번 줄의 Custom Code 명령어를 선택하십시오.
-
Single Line을 선택하고 다음의 drl 명령어를 추가합니다. 해당 명령어는 외력 센서값을 초기화하여 오차를 제거하는 기능을 수행합니다.
-
set_external_force_reset()
-
-
로봇의 동작 Mode를 Auto로 변경하십시오. 그러면 속성 탭은 자동으로 Monitoring 탭으로 전환됩니다.
-
실행 버튼을 누르십시오.
-
Monitoring 탭의 TCP Force를 확인하면, set_external_force_reset() 명령어를 사용하기 전보다 오차가 줄어들었음을 확인할 수 있습니다.