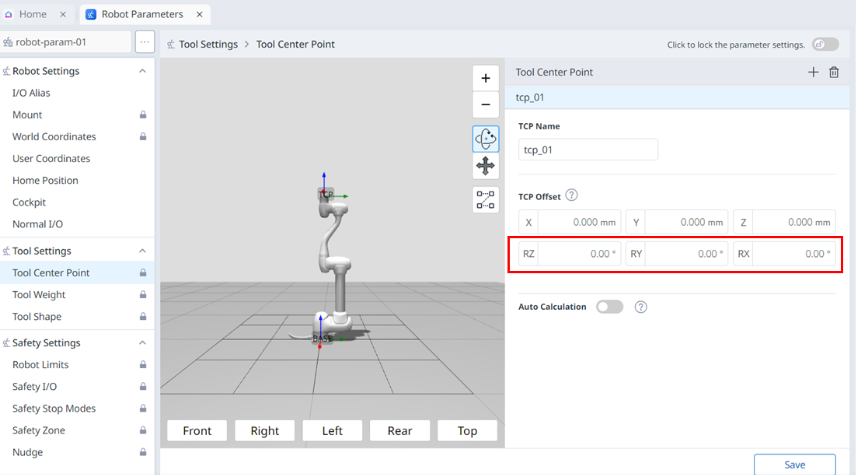
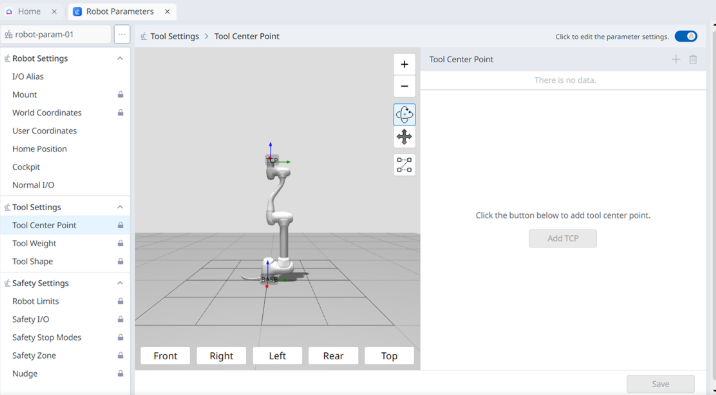
Tool Center Point
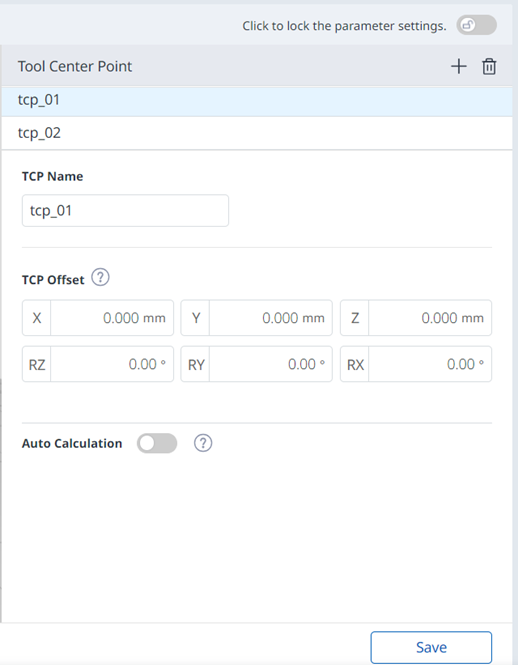
공구중심점(TCP)를 설정할 때에 플랜지 좌표계를 기준으로 위치와 함께 회전각을 함께 정의해야 합니다. 이때, 플랜지좌표계 기준 원점에서 공구중심점(TCP)까지 X, Y, Z 각 방향 별 거리가 10000mm 이상이 되도록 공구중심점(TCP)를 설정할 수 없습니다. 그리고, X, Y, Z의 환산 길이( ![]()
자동 계산을 통해서 공구중심점(TCP)을 설정하는 경우 X, Y, Z 위치만 자동 계산되므로 회전각은 사용자가 입력해야 합니다. 회전각은 RZ, RY, RX의 세 가지 항목으로 지정할 수 있으며 이는 ‘오일러 Z-Y-Z (Euler Z-Y-Z angles)’ 회전 방법을 따릅니다.
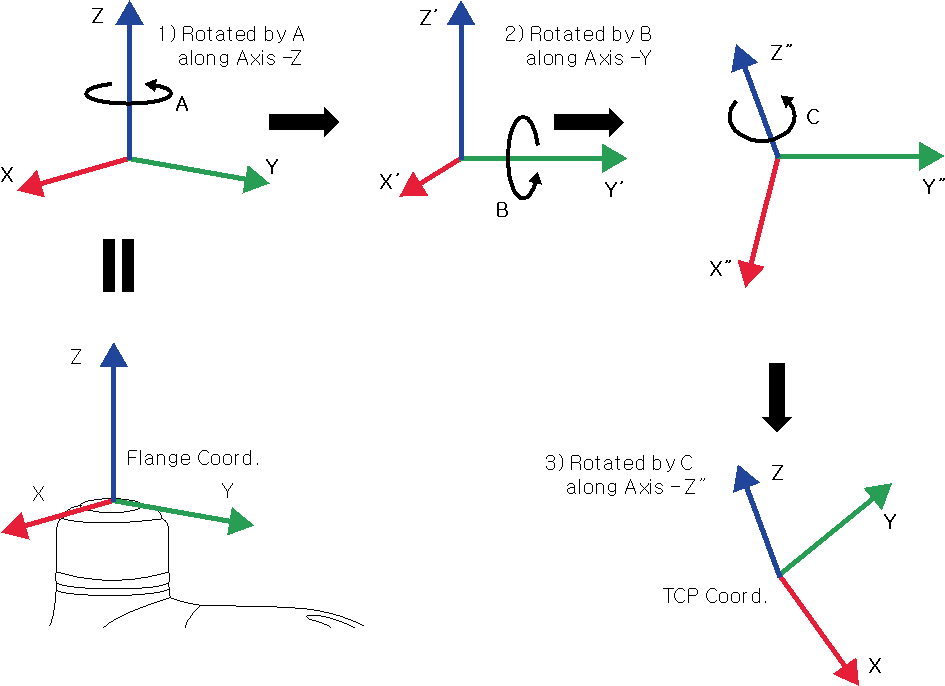
아래 그림에서 소문자 x, y, z로 표현되는 좌표축과 대문자 X, Y, Z로 표현되는 좌표축의 정의는 다음과 같습니다.
-
‘플랜지 좌표계’의 좌표축(x, y, z): 플랜지 끝단에 정의되는 ‘플랜지 좌표계’의 좌표축의 방향은 로봇의 조인트 각도가 (0,0,0,0,0,0)일 때 로봇 좌표계와 동일합니다.
-
‘TCP 좌표계’의 좌표축 (X, Y, Z): 플랜지 끝단에 장착하는 툴의 끝단 또는 작용점(Working Point)에 설정합니다. 이 때 ‘플랜지 좌표계’를 기준으로 ‘TCP 좌표계’의 회전각은 아래 1)~3)의 순서를 따라 정의됩니다.
-
플랜지 좌표계의 z축을 따라 A각도 회전
-
1)을 통해 회전된 좌표계의 y’축을 따라 B각도 회전
-
2)를 통해 회전된 좌표계의 z’’축을 따라 C각도 회전
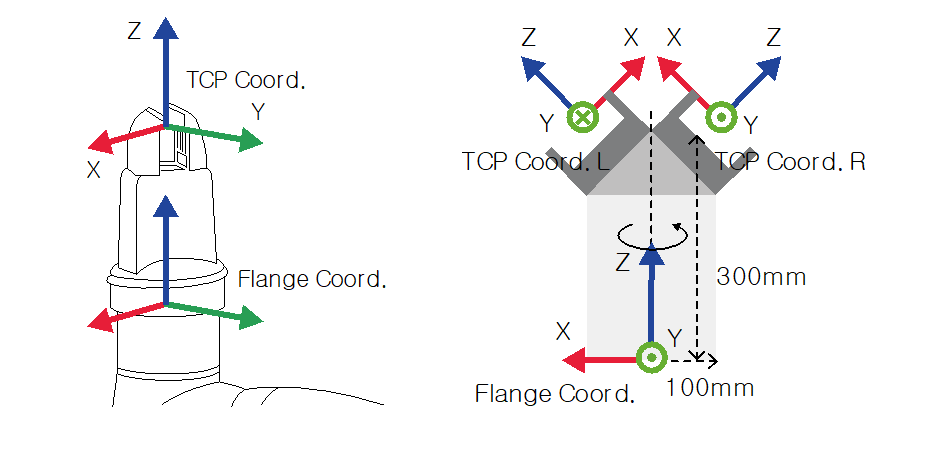
위의 방법을 따라 TCP 값을 설정하는 몇 가지 예를 들어보겠습니다.
-
[X, Y, Z, Rz, Ry, Rx] = [0, 0, 100, 0, 0, 0]: Z방향 오프셋만 있는 일반적인 그리퍼 (TCP Coord)
-
[X, Y, Z, Rz, Ry, Rx] = [100, 0, 300, 180, -45, 0]: 45도 각도를 가진 좌측 그리퍼 (TCP Coord. L)
-
[X, Y, Z, Rz, Ry, Rx] = [-100, 0, 300, 0, -45, 0]: 45도 각도를 가진 우측 그리퍼 (TCP Coord. R)
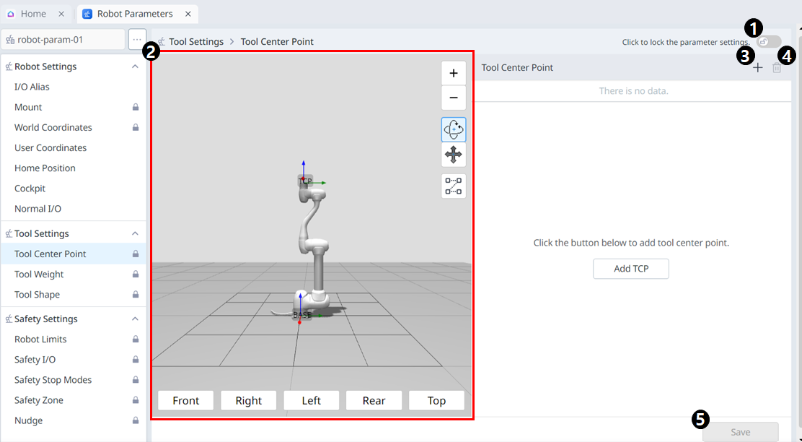
메뉴 구성
|
항목 |
설명 |
|
|---|---|---|
|
1 |
Lock 토글 버튼 |
설정된 값이 잠금됩니다. 값을 수정하기 위해서는 Safety Password의 입력이 필요합니다. |
|
2 |
3D Simulation |
설정한 Tool Center Point를 시뮬레이션 할 수 있습니다. |
|
3 |
추가하기 |
TCP를 추가할 수 있습니다. |
|
4 |
삭제하기 |
선택한 TCP를 삭제할 수 있습니다. |
|
5 |
Save |
설정 값을 저장할 수 있는 버튼입니다. |
설정이 잠금되었을 때 화면은 다음과 같습니다.
이때 선택한 TCP는 아래와 같이 파란색으로 표시됩니다.
Tool Weight
툴 무게(Tool Weight)를 추가하여 플랜지에 장착된 Tool의 무게를 설정할 수 있습니다. 툴 무게는 Robot Parameters > Tool Settings > Tool Weight 를 선택하여 설정할 수 있습니다.
-
자동 계산(Auto Measure) 기능을 사용하여 툴 무게를 측정할 수 있습니다.
-
작업물을 들고 있는 상태에서 툴 무게를 각 무게에 대해 추가할 것을 권장 합니다. 작업물의 무게가 무거울 경우 로봇이 작업물을 들고 있는 무게를 외력으로 인식할 수 있습니다. 로봇은 이 외력을 충돌로 판단하여 로봇이 멈출 수 있기 때문입니다.
-
태스크를 구성할 때 작업 과정에 따라 툴의 무게를 변경할 수 있습니다. 예를 들어 작업물을 들기 전에는 기본 툴 무게를 선택하고 작업물을 든 이 후에는 작업물을 든 무게를 선택하도록 태스크를 구성할 수 있습니다.
활성화된 툴 무게(Tool Weight) 아이템은 티치펜던트 상단의 툴 설정 아이콘( ![]()
-
툴 설정의 적용(Set)은 명령어 중 기타 명령어(Other Command) set과 동일합니다. set 명령어는 태스크 실행 중 Tool Weight을 변경할 때 활용이 가능합니다. 자세한 내용은 Task Editor 모듈를 참고하십시오.
알아두기
-
툴 무게(Tool Weight)는 최대 50개까지 등록 할 수 있습니다.
-
M series의 경우 모델별 허용 가능한 최대 툴 무게 초과 설정 시 가속도 자동 조정 기능이 활성화 됩니다.
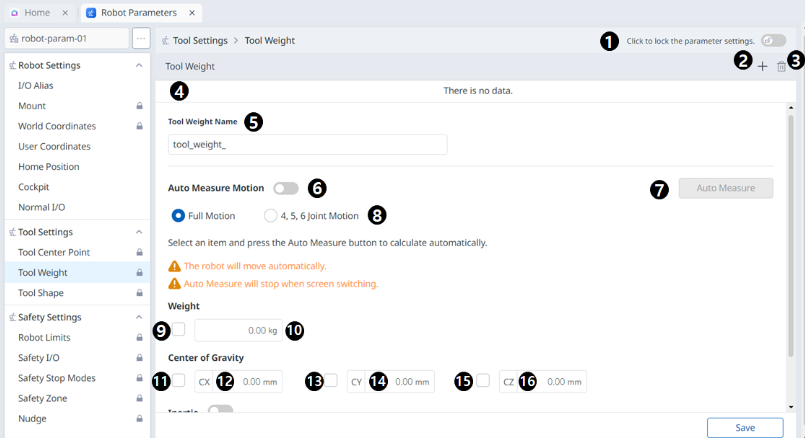

메뉴 구성
|
항목 |
설명 |
|
|---|---|---|
|
1 |
Lock 토글 버튼 |
설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
추가하기 |
새로운 Tool Weight를 추가할 수 있습니다. |
|
3 |
삭제하기 |
Tool Weight를 삭제할 수 있습니다. |
|
4 |
Tool Weight 리스트 |
설정한 Tool Weight의 리스트입니다. |
|
5 |
Tool Weight 이름 |
Tool Weight의 이름을 입력할 수 있습니다. |
|
6 |
Auto Measure Motion |
자동 측정 기능을 실행할 수 있습니다. |
|
7 |
자동 측정 |
옵션을 선택하고 이에 대한 자동 측정을 실행 할 수 있습니다. |
|
8 |
Motion 선택 |
옵션 중 원하는 Motion을 택할 수 있습니다. |
|
9 |
Weight 사용 선택 |
무게 사용을 선택할 수 있습니다. E 시리즈 혹은 FPT 센서가 없는 A 시리즈에서는 이 선택 박스가 비활성화됩니다. |
|
10 |
Weight 입력 |
원하는 무게를 입력할 수 있습니다. |
|
11 |
무게 중심 CX 사용 선택 |
무게 중심 CX 사용 여부를 선택할 수 있습니다. |
|
12 |
CX 입력 |
CX를 입력할 수 있습니다. |
|
13 |
무게 중심 CY 사용 선택 |
무게 중심 CY 사용 여부를 선택할 수 있습니다. |
|
14 |
CY 입력 |
CY를 입력할 수 있습니다. |
|
15 |
무게 중심 CZ 사용 선택 |
무게 중심 CZ 사용 여부를 선택할 수 있습니다. |
|
16 |
CZ 입력 |
CZ를 입력할 수 있습니다. |
|
17 |
관성 사용 여부 |
관성 사용 여부를 선택할 수 있는 체크박스입니다. |
|
18 |
lxx 입력 |
관성의 lxx 항목을 입력할 수 있습니다. |
|
19 |
lyy 입력 |
관성의 lyy 항목을 입력할 수 있습니다. |
|
20 |
lzz 입력 |
관성의 lzz 항목을 입력할 수 있습니다. |
|
21 |
lxy 입력 |
관성의 lxy 항목을 입력할 수 있습니다. |
|
22 |
lyz 입력 |
관성의 lyz 항목을 입력할 수 있습니다. |
|
23 |
lzx 입력 |
관성의 lzx 항목을 입력할 수 있습니다. |
|
24 |
Save |
설정 값을 저장할 수 있습니다. |
Tool Shape
툴 형상(Tool Shape)을 추가하여 플랜지에 장착된 툴의 형상을 설정할 수 있습니다.
툴 형상은 Robot Parameters 모듈 > Tool Settings>Tool Shape 을 선택하여 설정할 수 있습니다. 자세한 내용은 Tool Shape을 참조하십시오.
-
로봇은 로봇 끝단의 TCP(Tool Center Point)와 로봇 본체를 기준으로 공간 제한 위반 여부를 판단합니다. 실제 로봇에 설정된 TCP보다 툴 형상이 더 큰 경우에는 툴 형상을 추가해야만 작업물과 툴을 보호할 수 있습니다.
-
툴 형상을 너무 크게 설정하면 실제로 로봇을 움직일 수 있는 영역이 좁아지므로 주의하십시오.
툴 형상 아이템은 등록(Confirm)한 이후에 토글 스위치를 활성화 상태로 전환하여야만 사용할 수 있습니다. 활성화된 툴 무게(Tool Shape) 아이템은 티치펜던트 상단의 툴 설정 아이콘( ![]()
-
툴 설정의 적용(Set)은 명령어 중 기타 명령어(Other Command) set과 동일합니다. set 명령어는 태스크 실행 중 Tool Shape을 변경할 때 활용이 가능합니다. 자세한 내용은 Task Editor 모듈을 참고하십시오.
알아두기
툴 형상(Tool Shape)은 최대 50개까지 등록 할 수 있습니다.
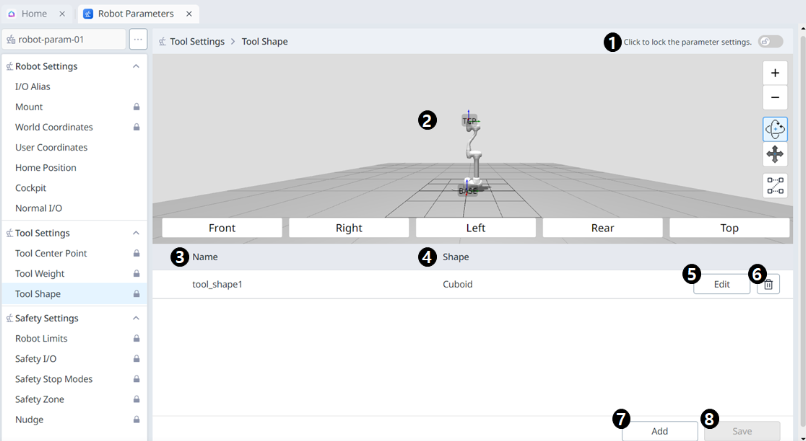
메뉴 구성
|
항목 |
설명 |
|
|---|---|---|
|
1 |
Lock 토글 버튼 |
설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
3D Simulation |
설정한 Tool Shape의 결과를 3D Simulation해볼 수 있습니다. |
|
3 |
Tool Shape 이름 |
설정된 Tool의 이름입니다. |
|
4 |
Tool Shape 모양 |
설정된 Tool의 Shape 형식입니다. |
|
5 |
Tool Shape 편집하기 |
설정된 Tool Shape를 편집할 수 있습니다. |
|
6 |
Tool Shape 삭제하기 |
선택한 Tool Shape를 삭제할 수 있습니다. |
|
7 |
Tool Shape 추가하기 |
Tool Shape를 추가할 수 있습니다. |
|
8 |
적용하기 |
Tool Shape를 설정 후 적용할 수 있습니다. |
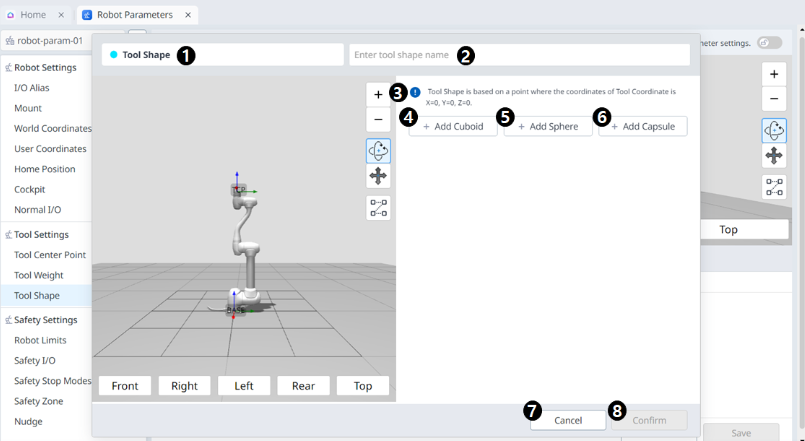
메뉴 구성
|
항목 |
설명 |
|
|---|---|---|
|
1 |
Tool Shape |
Tool Shape 팝업임을 표시합니다. |
|
2 |
이름 입력하기 |
Tool Shape의 이름을 입력할 수 있습니다. |
|
3 |
주의 사항 메시지 |
설정 시 주의 사항 메시지입니다. |
|
4 |
Add New Cuboid |
입방체를 추가할 수 있습니다. |
|
5 |
Add New Sphere |
구체를 추가할 수 있습니다. |
|
6 |
Add New Capsule |
캡슐을 추가할 수 있습니다. |
|
7 |
Cancel |
설정을 취소할 수 있습니다. |
|
8 |
Confirm |
설정을 확정할 수 있습니다. |
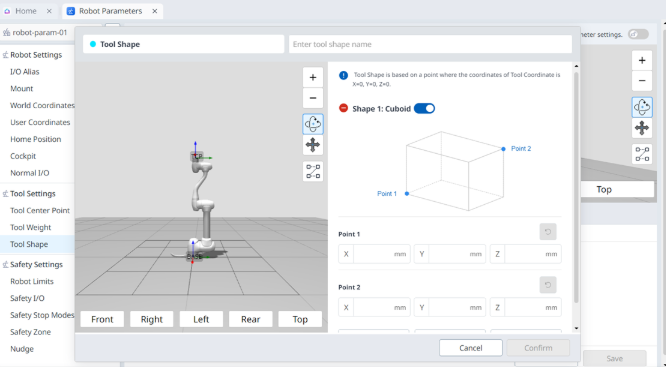
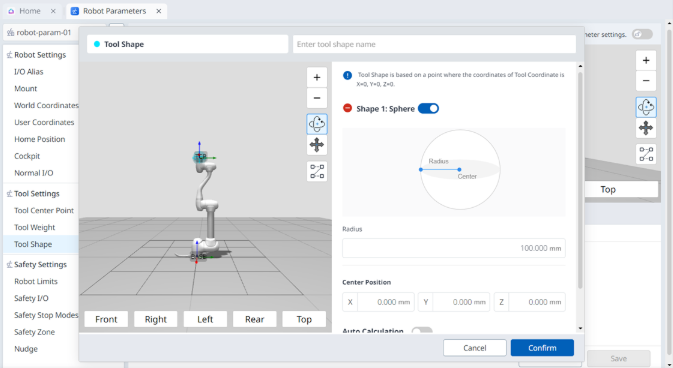
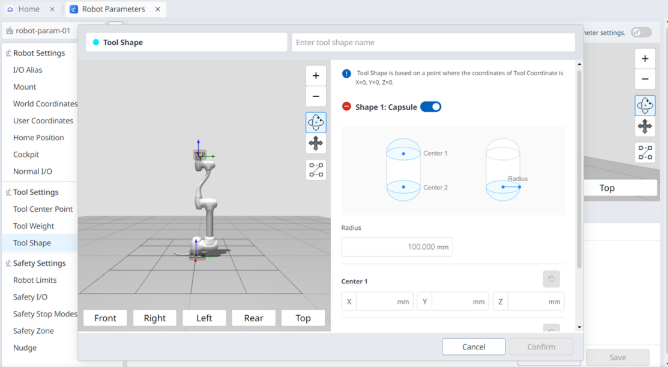
입방체 / 구체 / 캡슐을 추가했을 때의 디스플레이는 다음과 같습니다.
|
|
|
|