Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Sélectionnez le type de panneau |
Vous pouvez choisir l'emplacement du bouton déplacer. |
|
2 |
Simulation 3D. |
Il s'agit du visualiseur 3D, où vous pouvez voir à quoi ressemble le robot. |
|
3 |
Alignement du simulateur |
Vous pouvez utiliser cette section pour diriger le simulateur. |
|
4 |
Utiliser incrément |
Ce bouton permet d'activer les incréments d'angle ou de position. |
|
5 |
Incrément d'angle |
Cette section est l'endroit où l'incrément d'angle sur l'axe sélectionné est défini. |
|
6 |
Incrément de position |
Cette section est l'endroit où l'incrément de position sur l'axe sélectionné est défini. |
|
7 |
Collision |
Ce champ permet de définir la collision du robot. |
|
8 |
Forcer la surveillance |
Cette section vous permet de définir les forces sur les axes X, y et Z en fonction de base, outil, monde, référence, entre autres. |
|
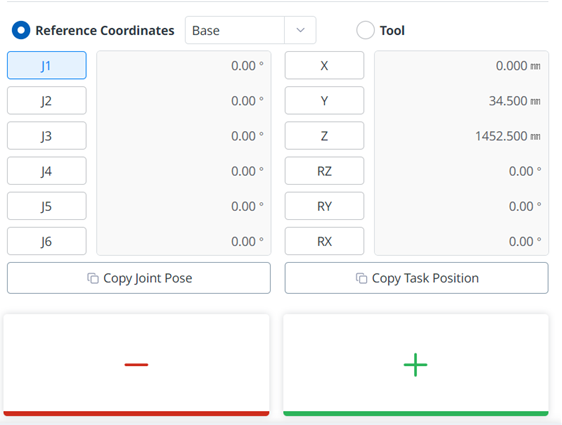
9 |
Sélectionnez le système de coordonnées de référence |
Sélectionnez le système de coordonnées de référence à utiliser pour les coordonnées de tâche de la figure 11. Vous pouvez choisir base, monde ou coordonnées utilisateur. |
|
10 |
Panneau de joint |
Vous pouvez sélectionner l'axe de liaison à décaler. |
|
11 |
Panneau des tâches |
Vous pouvez sélectionner l'axe de tâche à décaler. |
|
12 |
Copier pose J bouton |
Ce bouton vous permet de copier pose J. |
|
13 |
Copier pose X bouton |
Ce bouton vous permet de copier pose X. |
|
14 |
Déplacer - bouton |
Le robot peut se déplacer dans la direction - en fonction de chaque axe. A ce stade, vous pouvez déterminer la direction des - et + sur la simulation 3D sur le côté gauche. |
|
15 |
Déplacer le bouton + |
Vous pouvez faire bouger le robot dans la direction + en fonction de chaque axe. A ce stade, vous pouvez déterminer la direction des - et + sur la simulation 3D sur le côté gauche. |
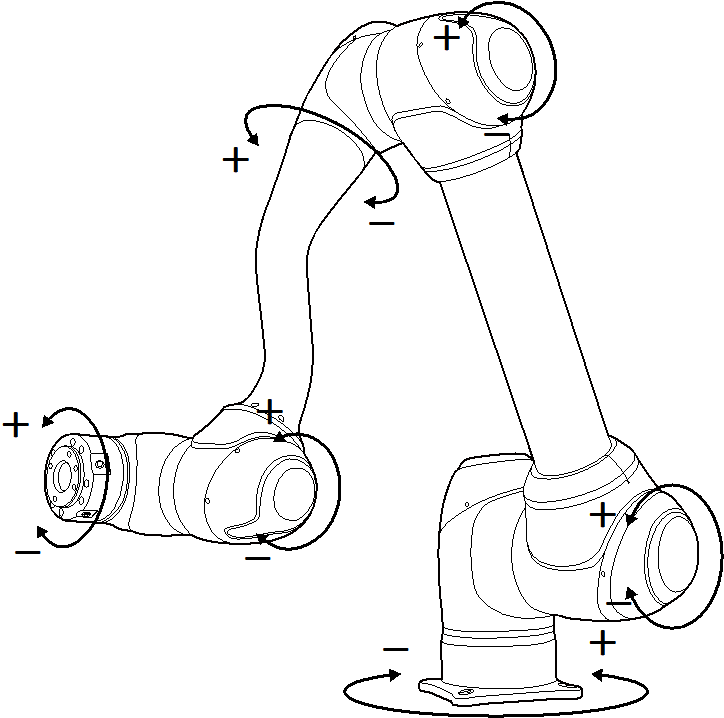
Exécuter en fonction de la liaison robot
Pour régler l'angle en fonction de la liaison du robot, procédez comme suit :
-
Sélectionnez l'axe (J1-J6) pour ajuster l'angle sur le panneau de joint.
-
Appuyez sur les boutons de direction (


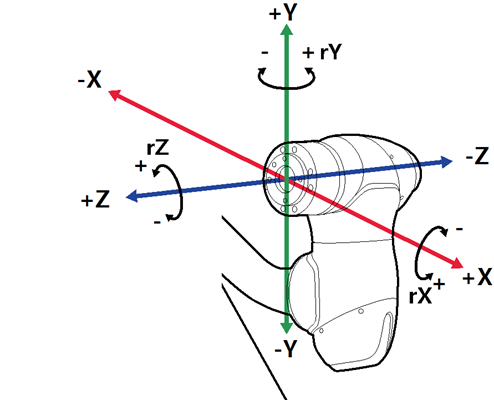
Exécution basée sur la base du robot
Pour déplacer le robot en fonction de ses coordonnées de base, procéder comme suit :
-
Sélectionnez la base comme système de coordonnées de référence.
-
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
-
Appuyez sur le bouton de direction (+,-) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Exécution basée sur les coordonnées du monde
Pour déplacer le robot en fonction des coordonnées du monde, procédez comme suit :
-
Sélectionnez le monde comme système de coordonnées de référence.
-
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
-
Appuyez sur le bouton de direction (+,-) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Exécution basée sur robot Tool
Pour déplacer le robot en fonction de l'outil robot, procéder comme suit :
-
Sélectionnez l' outil comme système de coordonnées de référence.
-
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
-
Appuyez sur le bouton de direction (+,-) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Remarque
-
La zone de sécurité ne s'applique pas en mode virtuel.
-
RX, Ry et Rz sont exécutés selon TCP (position centrale de l'outil).