Réglage des limites du robot
Dans limites du robot, diverses limites associées au robot peuvent être définies. Ces limites sont utilisées pour garantir que le robot fonctionne en toute sécurité dans les limites définies.
Les limites du robot peuvent être définies dans Paramètres du robot > Paramètres de sécurité > limites du robot.
-
Pour une description détaillée de chaque limite, reportez-vous à limites du robot.
Les limites du robot sont en grande partie divisées en 3 catégories. Chaque catégorie comprend les écrans et fonctions suivants.
Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
TCP/robot |
Grande classification des limites du robot. |
|
3 |
Réinitialiser |
Permet de réinitialiser les paramètres. |
|
4 |
Force |
Permet de définir la force. |
|
5 |
Alimentation |
Permet de régler l'alimentation. |
|
6 |
Vitesse |
Permet de régler la vitesse. |
|
7 |
Momentum |
Utilisé pour définir l'élan. |
|
8 |
Collision |
Permet de définir la collision. |
|
9 |
Enregistrer |
Permet d'enregistrer le paramètre applicable. |
Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
Vitesse du joint |
Grande classification des limites du robot. |
|
3 |
Réinitialiser |
Permet de réinitialiser les paramètres. |
|
4 |
J1 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
5 |
J2 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
6 |
J3 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
7 |
J4 (inactif pour les modèles de la série P) |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
8 |
J5 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
9 |
J6 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
10 |
Enregistrer |
Permet d'enregistrer le paramètre applicable. |
Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
Angle du joint |
Grande classification des limites du robot. |
|
3 |
Réinitialiser |
Permet de réinitialiser les paramètres. |
|
4 |
J1 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
5 |
J2 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
6 |
J3 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
7 |
J4 (inactif pour les modèles de la série P) |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
8 |
J5 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
9 |
J6 |
Permet de définir les paramètres des modes normal et réduit respectivement. |
|
10 |
Enregistrer |
Permet d'enregistrer le paramètre applicable. |
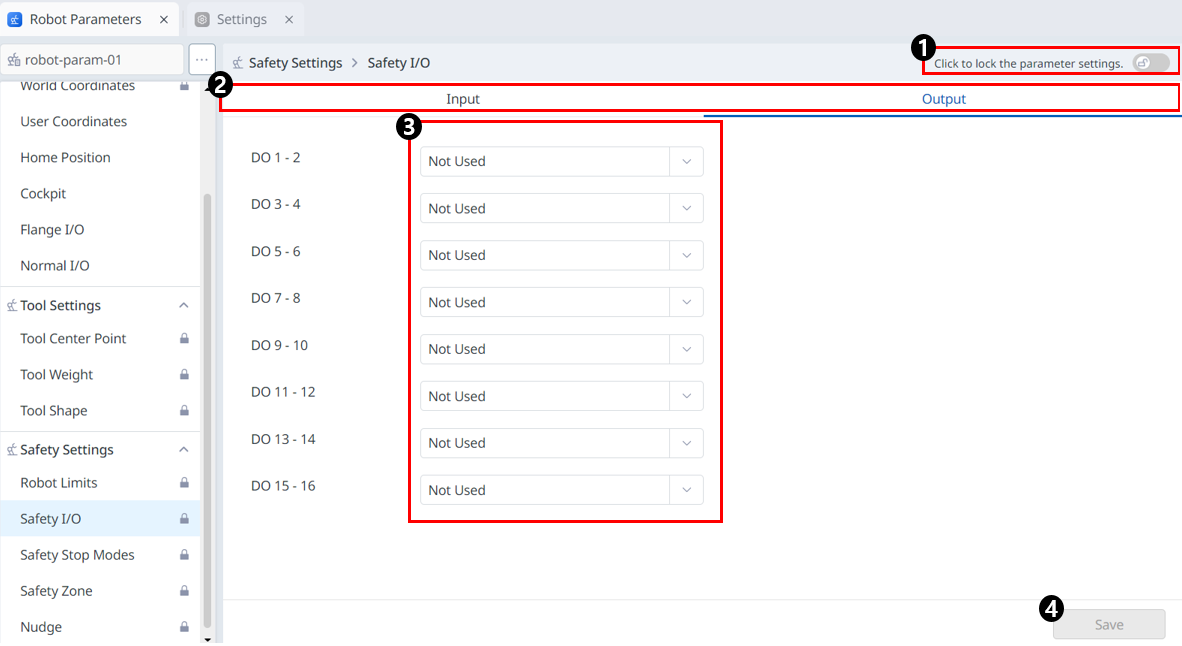
E/S de sécurité
Cette fonction est utilisée pour entrer/sortir des signaux liés à la sécurité vers les bornes redondantes. Si l'un des signaux d'entrée/sortie de sécurité est détecté comme ayant un signal redondant différent, il détermine un circuit ouvert ou une défaillance matérielle et arrête le robot en mode STO STO STO STOP.
-
Pour définir les E/S de sécurité, sélectionnez Paramètres du robot > Paramètres de sécurité > E/S de sécurité.
Pour plus d'informations, reportez-vous à la section E/S du signal de sécurité .
Entrée
Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
Entrée/sortie |
Il est possible de sélectionner l'entrée/sortie pour la régler. |
|
3 |
Réglage du signal |
Options définies pour chaque port.
Non utilisé Butée de protection (STO) (l) Arrêt d'urgence (l) Butée de protection (l) Vitesse réduite (l) Interrupteur d'activation 3 pos. (L à H & H) Interrupteur d'activation du guidage manuel (l à H & H) Fin et reprise des tâches HGC (G à H) Arrêt de protection (réinitialisation et reprise automatiques) (l) Activation dynamique de la zone de sécurité (H) Mode télécommande (H) Arrêt d'urgence (pas de bouclage) (l) Réinitialisation et reprise de l'erreur (de l à H) Réinitialisation du verrouillage (l à H) Butée de protection (SS1) (l) Butée de protection (SS2) (l) Activation dynamique de la zone de sécurité (l) |
|
4 |
Choisir d'ignorer ou non le signal en fonction de l'état du robot |
Si vous sélectionnez le signal « arrêt de protection », vous pouvez définir s'il faut ignorer le signal sélectionné dans les états « MANUEL, RÉCUPÉRATION, HGC » du robot. |
|
5 |
Régler le taux de décélération |
Vous pouvez définir le taux de décélération. Il peut être compris entre 0 et 100. |
|
6 |
Enregistrer |
Ce bouton vous permet d'enregistrer le réglage que vous avez saisi. |
Sortie
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
Entrée/sortie |
Il est possible de sélectionner l'entrée/sortie pour la régler. |
|
3 |
Réglage du signal |
Options définies pour chaque port.
Non utilisé Arrêt du couple de sécurité (STO) (l) Arrêt de sécurité (SOS) (l) État de vitesse normale (l) État de vitesse réduite (l) Mode Auto (l) Mode manuel (l) Zone autonome (l) Zone de collaboration (l) Zone de priorité élevée (l) Zone limitée d'orientation de l'outil (l) Arrêt d'urgence (l) Arrêt d'urgence (sans entrée de bouclage) (l) Zone désignée (l) Mode distant (l) Réinitialisation du verrouillage nécessaire (l) État guidage manuel (l) |
|
4 |
Enregistrer |
Ce bouton vous permet d'enregistrer le réglage que vous avez saisi. |
Paramètres des modes d'arrêt de sécurité
Apprendre les types de butées de sécurité et comment engager/désengager la butée de sécurité.
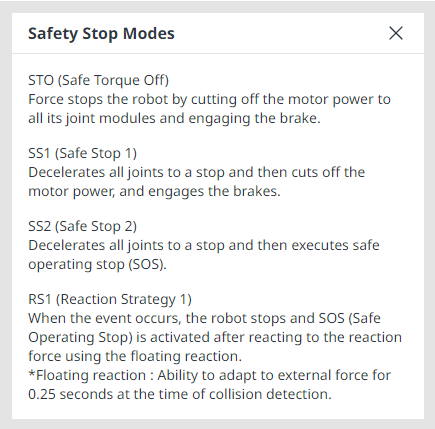
Types de butées de sécurité
Les modes d'arrêt fournis pour assurer la sécurité de l'utilisateur sont les suivants :
-
STO (arrêt du couple de sécurité) : Arrête l'arrêt de l'asservissement (l'alimentation du moteur est immédiatement coupée)
-
SS1 (arrêt de sécurité 1) : Servo désactivé après arrêt de décélération maximum
-
SS2 (arrêt de sécurité 2) : Veille après arrêt en décélération maximale (pause)
-
RS1 : En cas de collision, se conforme à la direction opposée à la collision, puis passe en mode veille (ne peut être défini que dans détection de collision/violation de limite de force TCP)
Les robots Doosan Robotics ont deux types de fonctions d'arrêt de sécurité. L'arrêt d'urgence est utilisé pour les situations d'urgence générales, et le robot peut reprendre le fonctionnement avec Servo activé après avoir relâché l'arrêt d'urgence. En cas d'arrêt de protection, le robot peut reprendre le fonctionnement en résolvant la cause de l'arrêt de protection et en relâchant l'arrêt.
-
Arrêt d'urgence : Il définit le mode d'arrêt lorsque le bouton d'arrêt d'urgence de la télécommande d'apprentissage ou d'un dispositif externe supplémentaire installé est activé
-
Il s'active lorsque l'interrupteur d'arrêt d'urgence de la télécommande d'apprentissage ou celui connecté à la borne EM TBSFT est enfoncé.
-
Seuls STO ou SS1 peuvent être sélectionnés.
-
-
Butée de protection : Il définit le mode arrêt lorsque l'équipement de protection connecté en externe est activé
-
Il s'active lorsque l'équipement de protection connecté au terminal TBSFT PR est activé.
-
Pour plus d'informations sur les fonctions d'arrêt de sécurité, reportez-vous à fonctions de sécurité.
Comment engager/désengager la butée de sécurité
Appuyez sur le bouton d'arrêt d'urgence de la télécommande d'apprentissage ou activez le dispositif de sécurité connecté à l'E/S de sécurité pour activer l'arrêt d'urgence. Les dispositifs de sécurité peuvent être connectés à l'arrêt d'urgence ou à l'arrêt de protection via Paramètres du robot > Paramètres de sécurité > fonctions E/S de sécurité de l'écran de la télécommande d'apprentissage.
-
Pour plus d'informations sur la connexion d'un dispositif de sécurité aux E/S de sécurité, reportez-vous à la section connexion des E/S du contrôleur.
-
Pour plus d'informations sur la configuration de la fonction d'arrêt de sécurité pour cette connexion dans le programme, reportez-vous à la section E/S du signal de sécurité.
Unknown Attachment
Menu
|
Éléments |
Description |
|
|---|---|---|
|
1 |
Bouton bascule verrouillage |
Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
|
2 |
Message d'information |
Message fournissant les informations nécessaires au réglage. |
|
3 |
Réinitialiser |
Un bouton pour réinitialiser les paramètres. |
|
4 |
Arrêt d'urgence |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO SS1 |
|
5 |
Butée de protection |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : SS1 SS2 |
|
6 |
Violation de la limite d'angle de joint |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO SS1 SS2 |
|
7 |
Violation de la limite de vitesse conjointe |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 |
|
8 |
Violation de la limite de couple du joint |
Seul le BTS est disponible. |
|
9 |
Détection de collision |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 RS1 |
|
10 |
Violation de la limite de position du robot TCP |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO SS1 SS2 |
|
11 |
Violation de la limite d'orientation TCP |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 |
|
12 |
Violation de la limite de vitesse TCP |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO (sauf pour la série H/P) SS1 SS2 |
|
13 |
Violation de limite de force TCP |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 |
|
14 |
Violation de la limite d'impulsion |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 |
|
15 |
Violation de limite mécanique |
Une butée de sécurité peut être sélectionnée pour être utilisée pour l'élément correspondant. Les menus déroulants comprennent : STO (sauf pour la série H/P) SS1 SS2 |
|
16 |
Enregistrer |
Ce bouton vous permet d'enregistrer les valeurs de réglage. |
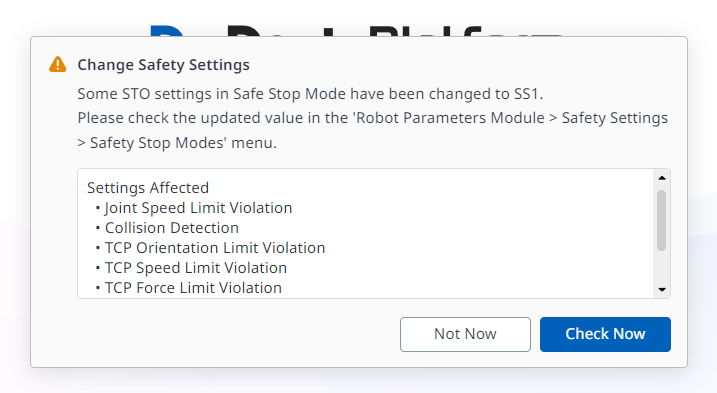
Remarque
La fenêtre contextuelle suivante apparaît sur le message d'information :
Remarque
À partir de la version 3,2.2, certains paramètres STO dans les modes d'arrêt de sécurité du modèle H ont été modifiés en SS1.
Si les valeurs utilisées ont été mises à jour, la fenêtre contextuelle suivante s'affiche.