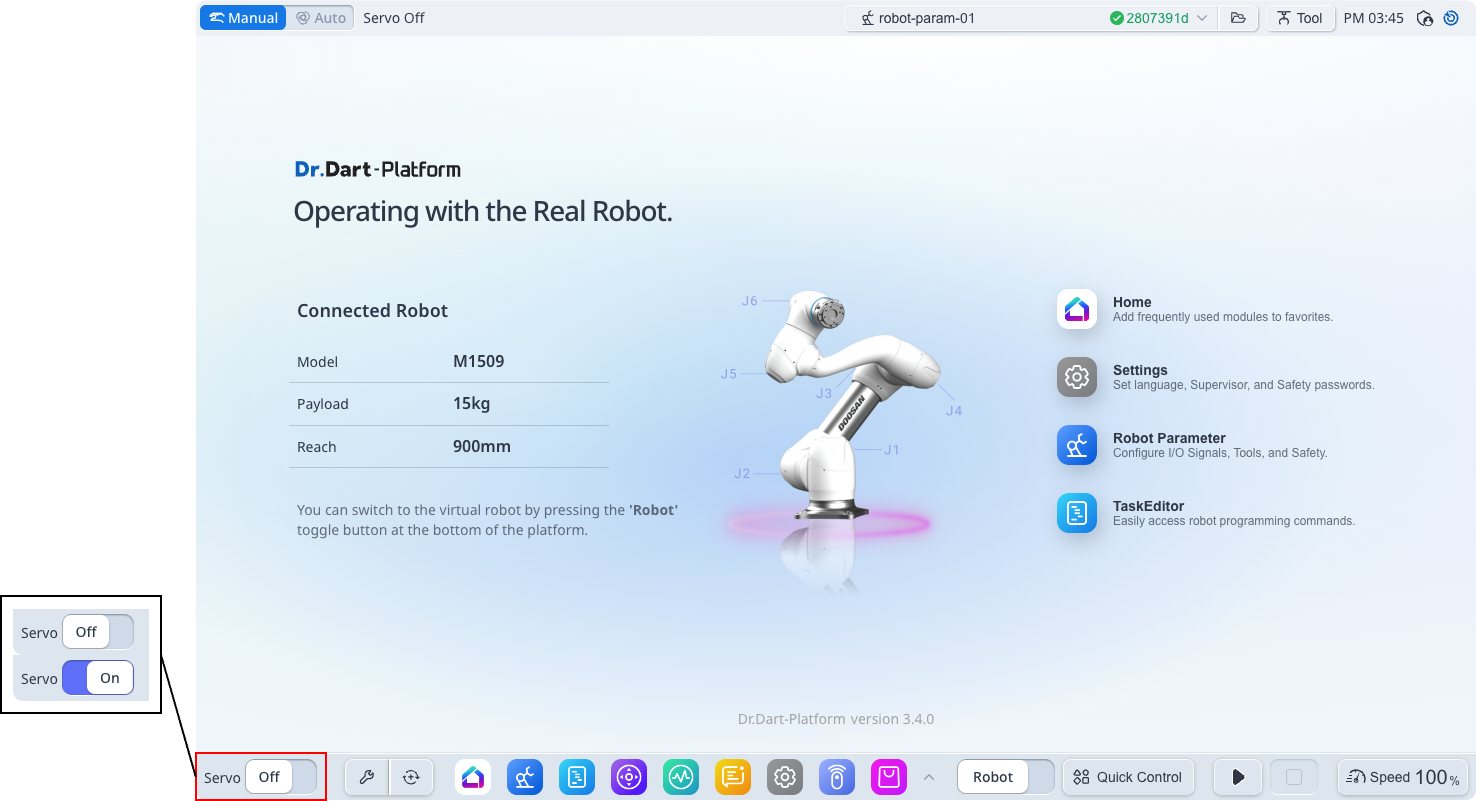
Servo on fait référence à un état de veille dans lequel le bras du robot peut être entraîné en alimentant le joint. Servo désactivé lorsqu'un bouton d'arrêt d'urgence est enfoncé ou qu'une restriction de sécurité n'est pas respectée. Dans l'état servo OFF, le joint est hors tension et le bras du robot ne peut pas être piloté et l' éditeur de tâches, JOG plus associé à l'entraînement du bras du robot est désactivé dans le menu principal.
Pour passer de servo OFF à servo on, appuyez sur le bouton Servo situé à gauche du menu principal en bas.