Współrzędne świata
Współrzędne świata robota można ustawić na podstawie współrzędnych Świata. Jeśli współrzędna robota jest współrzędnymi bazowymi, ten krok można pominąć.
Współrzędne świata można ustawić w menu Parametry robota > Ustawienia robota > Współrzędne świata.
-
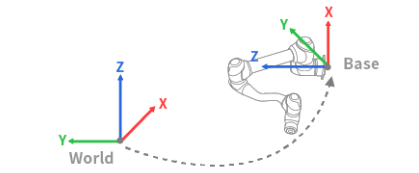
Współrzędne świata są używane, gdy lokalizacja instalacji podstawy robota jest fizycznie przesunięta/obrócona.
-
Zmiana współrzędnych świata spowoduje zastosowanie tego samego ruchu/obrotu na ekranie symulatora robota.
Uwaga
Współrzędne świata mogą być również używane nawet po zmianie położenia podstawy i kąta po nauczaniu robotów. Jeśli współrzędne zadań utworzonych w przeszłości poprzez nauczanie robotów zostaną zmienione z BAZY na ŚWIAT, przesunięcie odpowiadające ruchowi/obrotowi współrzędnych świata zostanie zastosowane do wszystkich współrzędnych ruchu.
Unknown Attachment
Unknown Attachment
Menu
|
Elementy |
Opis |
|
|---|---|---|
|
1 |
Przycisk przełączania blokady |
Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
|
2 |
Obraz informacyjny |
Jest to obraz informacyjny wymagany do ustawienia. |
|
3 |
Komunikat informacyjny |
Jest to komunikat informacyjny wymagany do ustawienia. |
|
4 |
Pozycja mocowania |
Ta sekcja zawiera wartości pozycji montażowej dla A, B i C. |
|
5 |
Ustawienia punktu, linii i płaszczyzny |
W tym miejscu można wybrać i ustawić żądane elementy pomiędzy punktem, linią i płaszczyzną. |
|
6 |
Przewodnik dydaktyczny |
Jest to przewodnik do ustawiania punktu, linii i płaszczyzny. |
|
7 |
Współrzędne |
W tym miejscu można wybrać żądaną współrzędną pomiędzy bazą a światem. |
|
8 |
Ustawienie punktu pierwszego |
W tym miejscu można ustawić ustawienia dla każdej z 6 osi, a także uzyskać pozycję i przenieść do. |
|
9 |
Przycisk Zastosuj punkty nauczania |
Ten przycisk umożliwia wprowadzenie żądanych ustawień i ich zastosowanie. |
|
10 |
Reset współrzędnych świata do bazy |
Ten przycisk umożliwia zresetowanie wprowadzonych już współrzędnych Świata do bazy. |
|
11 |
Ustawienie współrzędnych od świata do bazy |
W tym miejscu można wprowadzić ustawienia dla 6 osi. |
|
12 |
Przycisk Zastosuj |
Można zastosować wartość ustawienia. |
Współrzędne użytkownika
Unknown Attachment
Menu
|
Elementy |
Opis |
|
|---|---|---|
|
1 |
Dodaj nowy |
Ten przycisk umożliwia usunięcie wybranej współrzędnej użytkownika. Można dodać do 100 współrzędnych użytkownika. |
|
2 |
Usuń |
Ten przycisk umożliwia usunięcie wybranej współrzędnej użytkownika. |
|
3 |
Wybrane współrzędne użytkownika |
Jest to lista dodanych współrzędnych użytkownika. |
|
4 |
Nazwa współrzędnych użytkownika |
W tym miejscu można ustawić nazwy współrzędnych użytkownika. Można wprowadzić liczbę od 101 do 200, o maksymalnej długości 40 znaków. |
|
5 |
Ustawienia punktu, linii i płaszczyzny |
W tym miejscu można ustawić każdy punkt, linię i płaszczyznę. |
|
6 |
Ikona informacji |
Dostępny jest przewodnik po współrzędnych użytkownika. |
|
7 |
Współrzędne |
W tym miejscu można wybrać bazę lub Świat jako podstawę żądanej wartości. |
|
8 |
Ustawienie punktu pierwszego |
W tym miejscu można wprowadzić wartości dla każdej z dwóch osi punktu 6 i uruchomić polecenie Pobierz pozycję lub Przenieś do. |
|
9 |
Zastosuj punkty nauczania |
Ten przycisk umożliwia zastosowanie żądanych wartości po ich wprowadzeniu. |
|
10 |
Współrzędne użytkownika |
W sekcji Współrzędne użytkownika można wprowadzić każdą z żądanych wartości. |
|
11 |
Zapisz |
Ten przycisk umożliwia zapisanie wartości ustawień. |