Pozycja wyjściowa
Unknown Attachment
Menu
|
Elementy |
Opis |
|
|---|---|---|
|
1 |
Opcja pozycji domyślnej |
W tej sekcji można wybrać opcję Pozycja domyślna. |
|
2 |
Domyślna wartość pozycji |
Są to wartości odpowiadające pozycji domyślnej, z których wszystkie to zero. |
|
3 |
Opcja Niestandardowa pozycja |
Umożliwia to wybranie opcji Niestandardowa pozycja. |
|
4 |
Wartość pozycji niestandardowej |
Można sprawdzić aktualnie ustawioną wartość pozycji niestandardowej i aktualną pozycję robota. |
|
5 |
Pozycja wyjściowa |
Ten przycisk umożliwia ustawienie pozycji domyślnej lub pozycji niestandardowej ustawionej jako pozycja wyjściowa. |
|
6 |
Komunikat ostrzegawczy |
Uwaga dotycząca ostrożności podczas konfigurowania tej funkcji. |
|
7 |
Zapisz |
Ten przycisk umożliwia zapisanie wartości ustawień. |
Ostrzeżenie
W przypadku zamiany robota lub połączenia robota należy zresetować własne położenie wyjściowe.
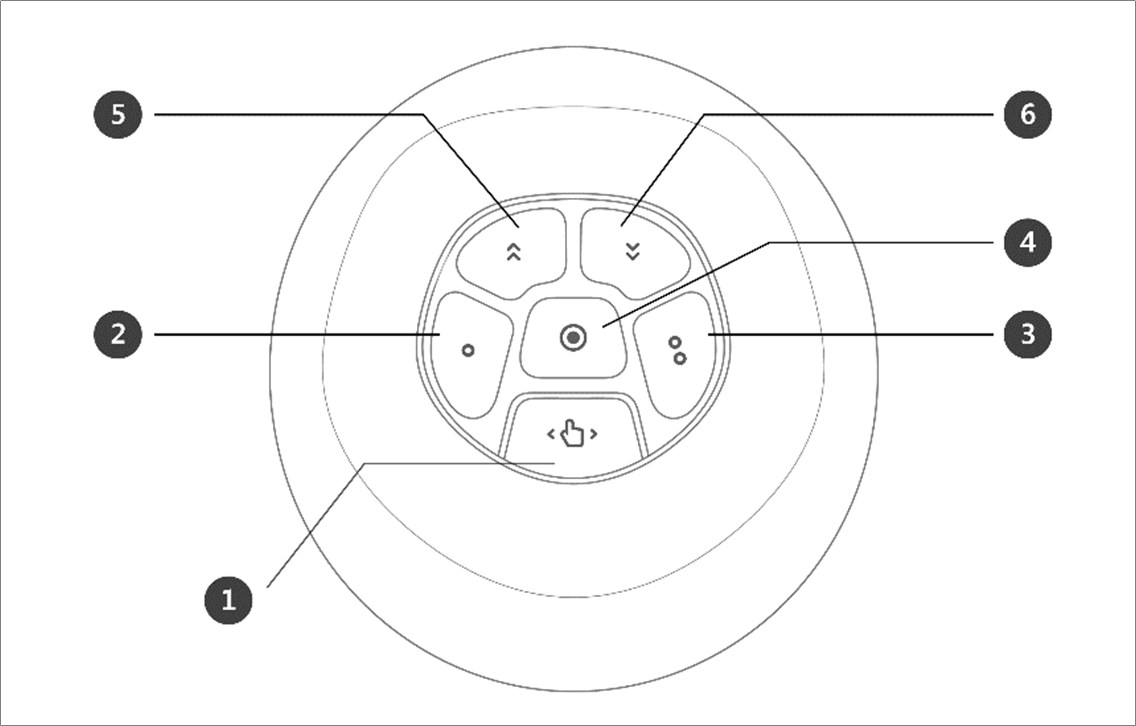
Kokpit
Bezpośrednie nauczanie służy do trzymania końca robota własnymi rękami, aby pchnąć i pociągnąć robota do pożądanej pozycji i zastosować pozycję do aktualnie wybranego ruchu. Istnieją dwie metody nauczania bezpośredniego.
-
Napęd Freedrive: Każde połączenie porusza się w kierunku, w którym użytkownik przyłożył siłę
-
Ruch powiązany: Koniec robota porusza się lub obraca tylko w kierunku ustawionym w ruchu ograniczonym, nawet jeśli siła jest przyłożona z losowego kierunku
Napęd Freedrive
Po naciśnięciu przycisku zostanie aktywowany tryb Freedrive, dzięki czemu robot może być swobodnie poruszany. Każde połączenie porusza się w kierunku, w którym użytkownik przyłożył siłę. Po zwolnieniu przycisku robot nie może być poruszany ręcznie.
-
Podczas bezpośredniego nauczania dioda LED robota miga na niebiesko.
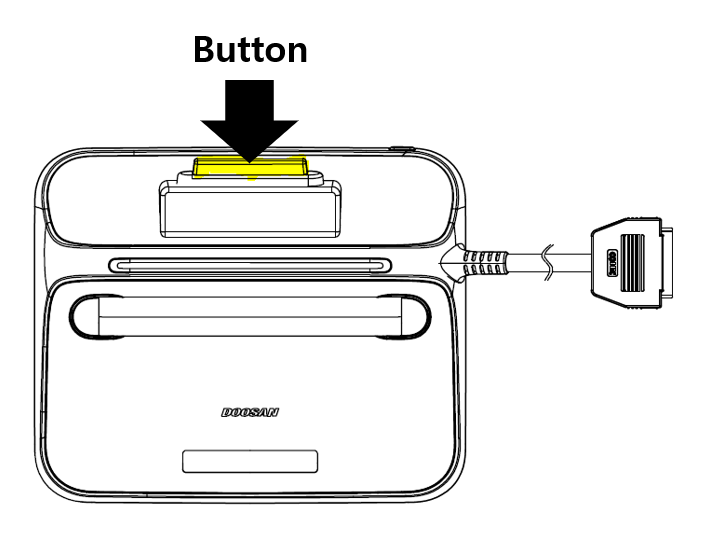
Naciśnięcie przycisku przewodnika ręcznego z tyłu manipulatora spowoduje uaktywnienie trybu Freedrive, podobnie jak naciśnięcie przycisku i swobodne poruszanie robotem.
Ruch powiązany
Po naciśnięciu przycisków 2 i 3 koniec robota porusza się tylko w kierunku odpowiadającym warunkowi powiązania, nawet jeśli siła jest przyłożona z losowego kierunku. Warunek powiązania można ustawić z 2 z 4 warunków na poniższym rysunku: Powiązana z osią z, powiązana z nieruchomą płaszczyzną, powiązana z powierzchnią i powiązana z kierunkiem.
Unknown Attachment
Menu
|
Elementy |
Opis |
|
|---|---|---|
|
1 |
Obraz kokpitu |
Jest to obraz ustawień kokpitu. |
|
2 |
Resetuj |
Ten przycisk umożliwia zainicjowanie ustawionych wartości. |
|
3 |
Ustawienie jednego przycisku |
Jest to sekcja, w której można wybrać funkcję, która ma być ustawiona dla przycisku. |
|
4 |
2 Ustawienie przycisku |
Jest to sekcja, w której można wybrać funkcję, która ma być ustawiona dla przycisku 2. |
|
5 |
2+1 Przyciski |
W tej sekcji można wybrać, czy dla przycisków 2+1 ma zostać włączone mocowanie. |
|
6 |
Obraz prowadzący |
Obraz prowadzący dla elementów ustawień kokpitu. |
Uzyskiwanie statusu przycisku kokpitu
Użytkownik może uzyskać informacje o tym, czy przycisk Cockpit jest wciśnięty, czy zwolniony.
Robot zapewnia funkcję sterowania przyciskiem Cockpit, umożliwiając jego wykorzystanie w różnych zastosowaniach.
-
„Dane monitorowania” w interfejsie API komunikacji zawiera informacje na temat przycisku Cockpit.
-
Jeśli naciśniesz przycisk kokpitu robota lub odwrotnie, możesz go wykryć za pomocą interfejsu DRL API.
-
DRL API: Get_cockpit_input (patrz instrukcja programowania).
-
Parametry: (int) indeks
-
Powroty: (int) : Wciśnięty (przycisk wciśnięty), Zwolniony (przycisk nie jest wciśnięty)
-