Uwaga
Przed przystąpieniem do próbkowania próbki należy przeczytać i przestrzegać środkówostrożności . Więcej informacji można znaleźć W CZĘŚCI pierwszej. Instrukcja bezpieczeństwa.
Uwaga
-
Jeśli zewnętrzny moment obrotowy przekracza wartość progową podczas włączania lub wyłączania kontroli zgodności, robot zatrzymuje program z powodu błędu JTS (Joint Torque Sensor).
-
Zmiana sztywności może być przeprowadzona niezależnie od zewnętrznego momentu obrotowego.
-
Podczas kontroli zgodności nie można wykonać wspólnych ruchów, takich jak polecenie MoveJ.
|
Próg błędu JTS (Nm) |
||||||
|
Model |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
M1013 |
25 |
25 |
25 |
15 |
15 |
15 |
|
M0617 |
30 |
30 |
30 |
15 |
15 |
15 |
|
M0609 |
18 |
18 |
15 |
15 |
15 |
15 |
|
M1509 |
18 |
18 |
15 |
15 |
15 |
15 |
|
H2515 |
40 |
50 |
40 |
15 |
15 |
15 |
|
H2017 |
40 |
50 |
40 |
15 |
15 |
15 |
-
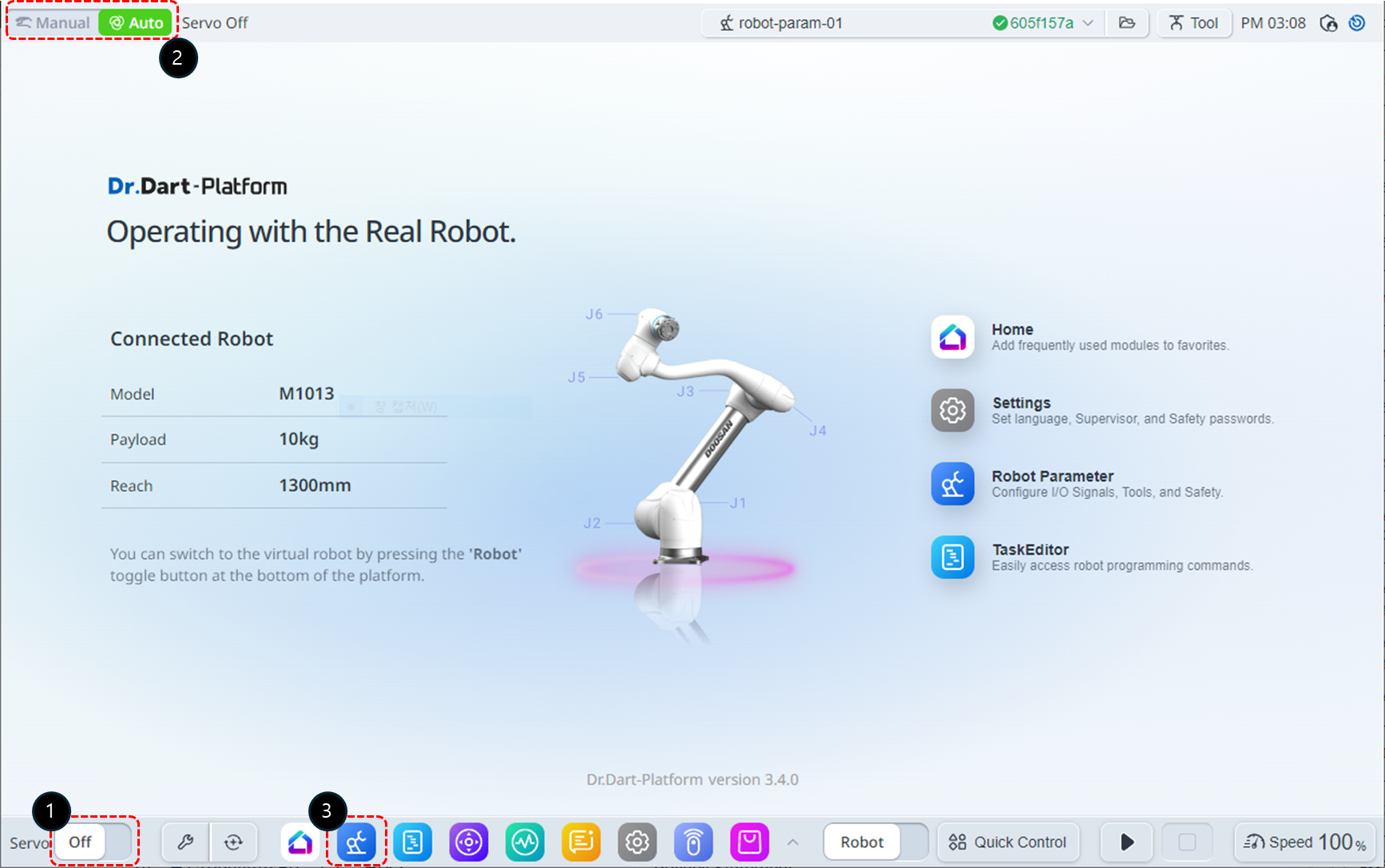
Zmienić stan serwomechanizmu na WŁĄCZONY.
-
Zmień tryb pracy na Ręczny.
-
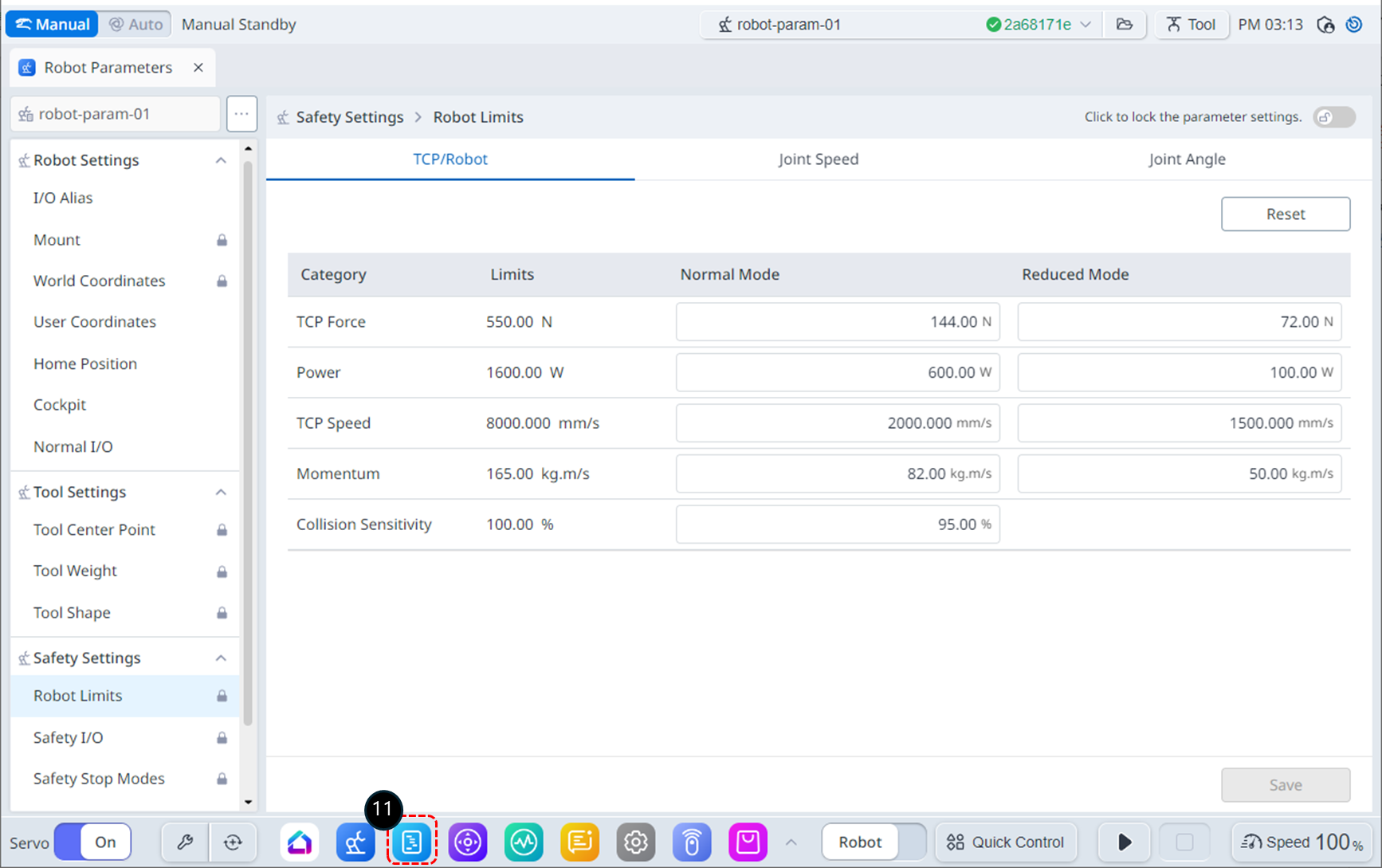
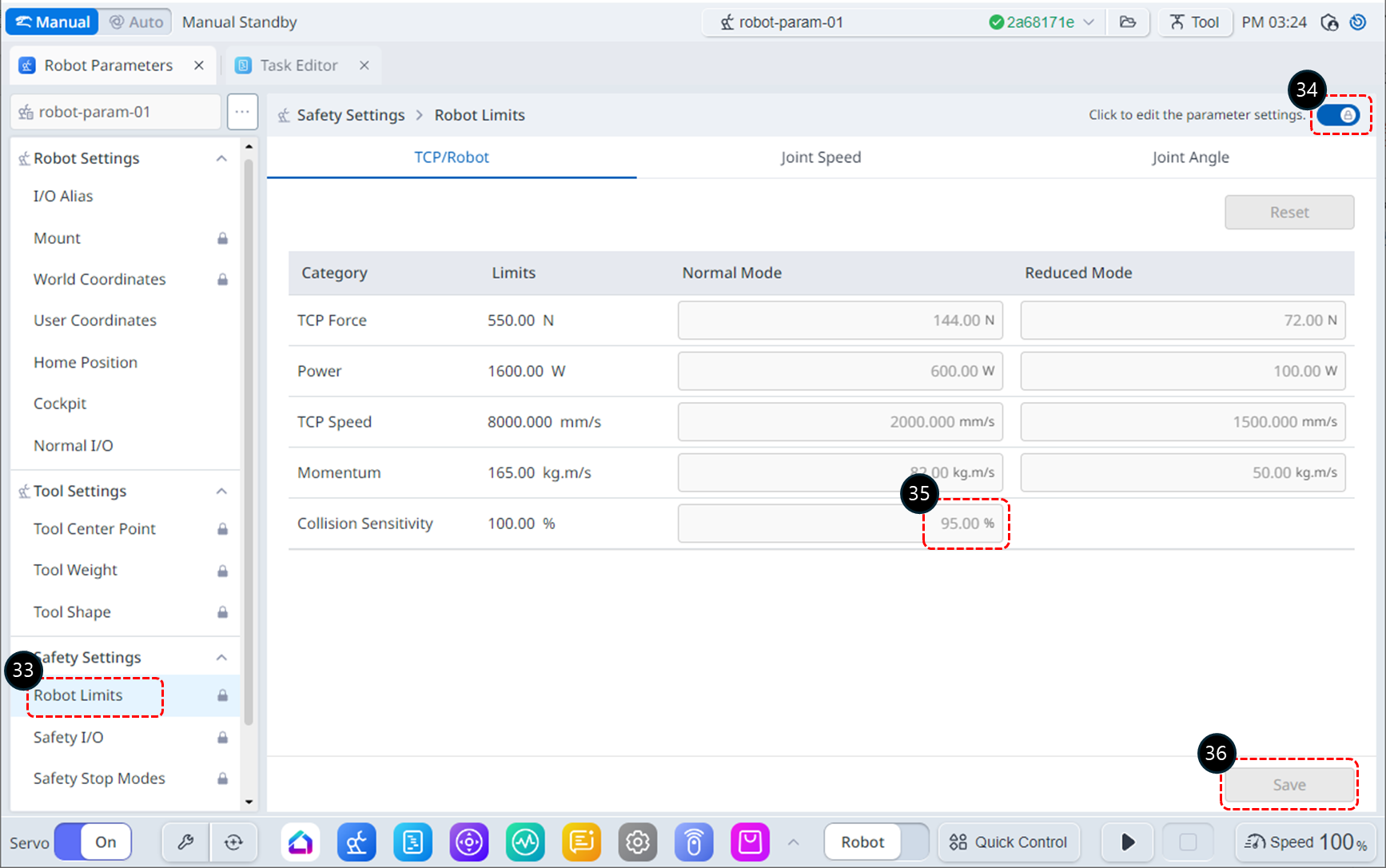
Z dolnego menu wybierz moduł Parametry robota. W tym przykładzie czułość kolizji jest ustawiona na 95%, aby wyjaśnić przyczynę obniżenia czułości kolizji podczas korzystania z kontroli zgodności.
-
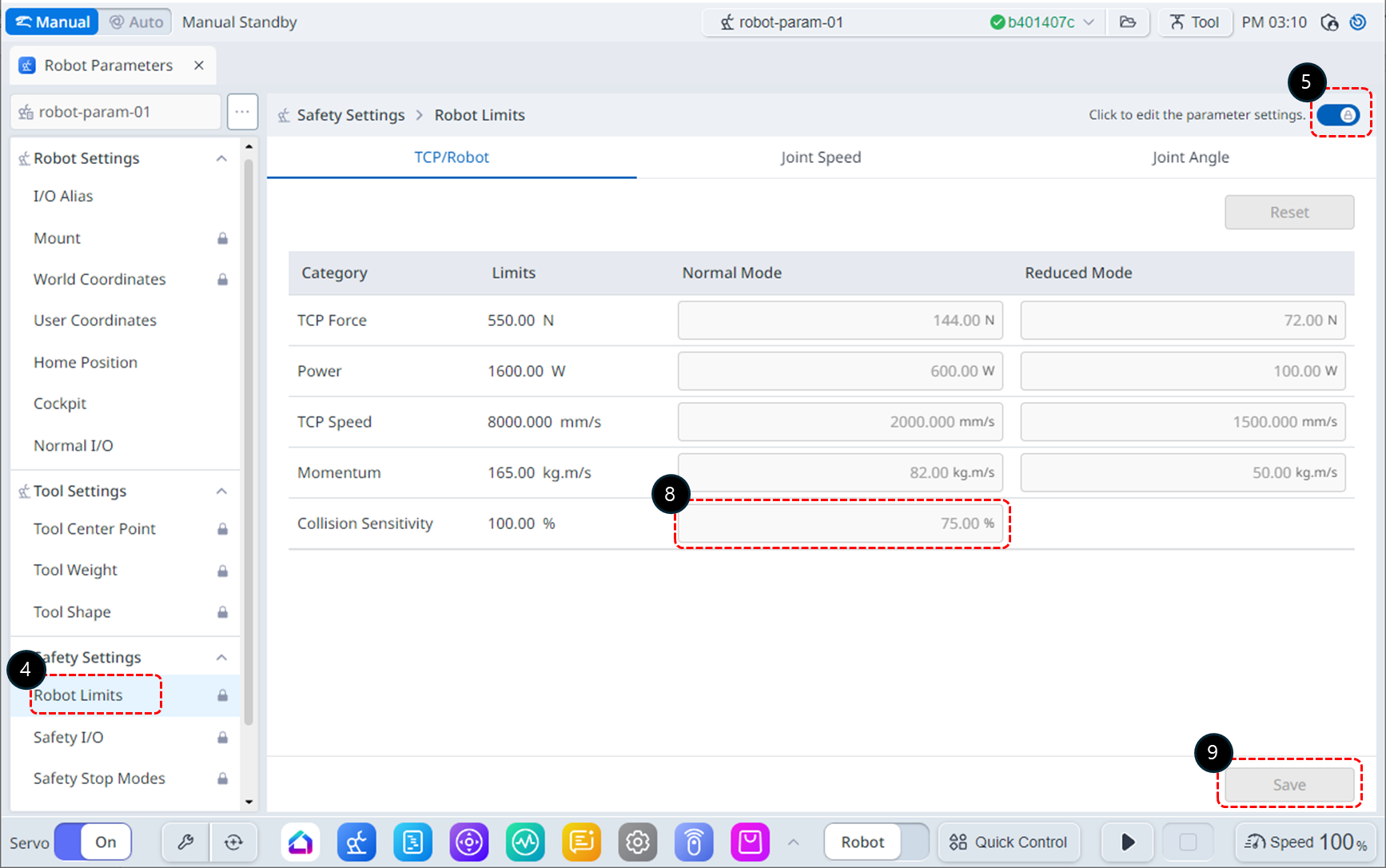
Wybierz opcję Limity robota w menu Ustawienia bezpieczeństwa.
-
Włącz stan edycji parametrów.
-
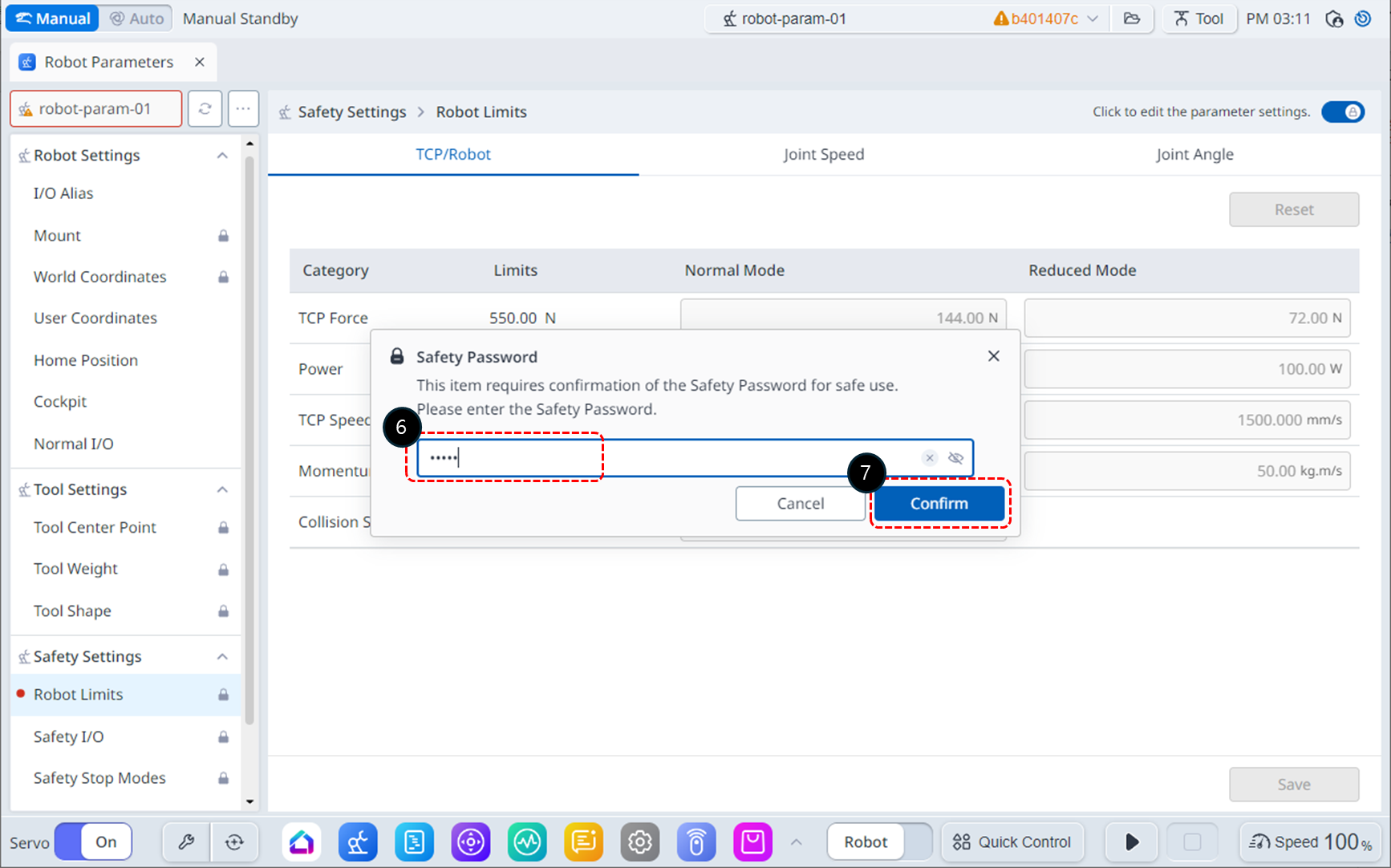
Jeśli pojawi się okno wprowadzania hasła, wprowadź hasło bezpieczeństwa (domyślne hasło bezpieczeństwa: Admin).
-
Kliknij przycisk Potwierdź.
-
Zmień czułość kolizji na 95%.
-
Kliknij przycisk Zapisz, aby zapisać ustawienia.
-
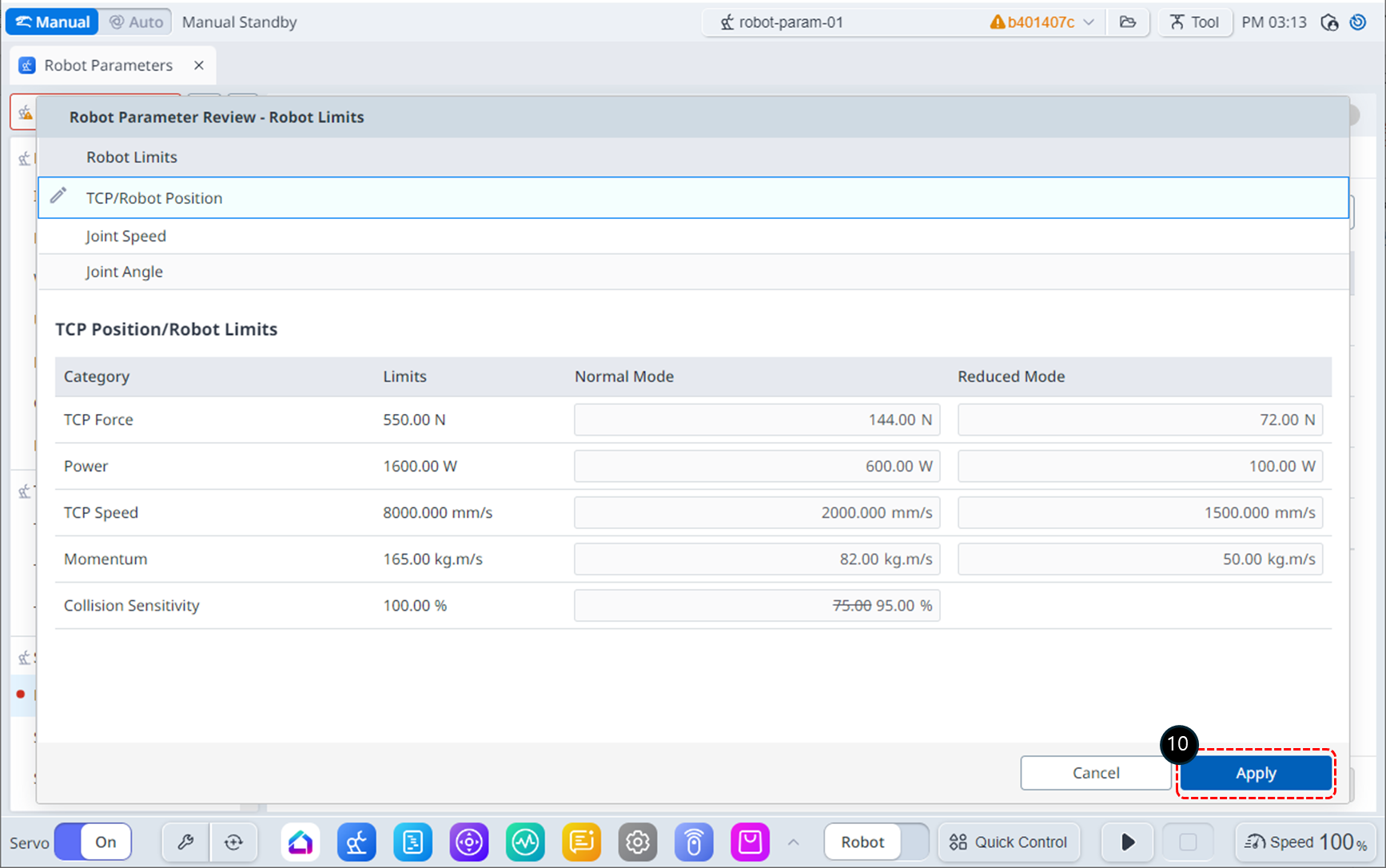
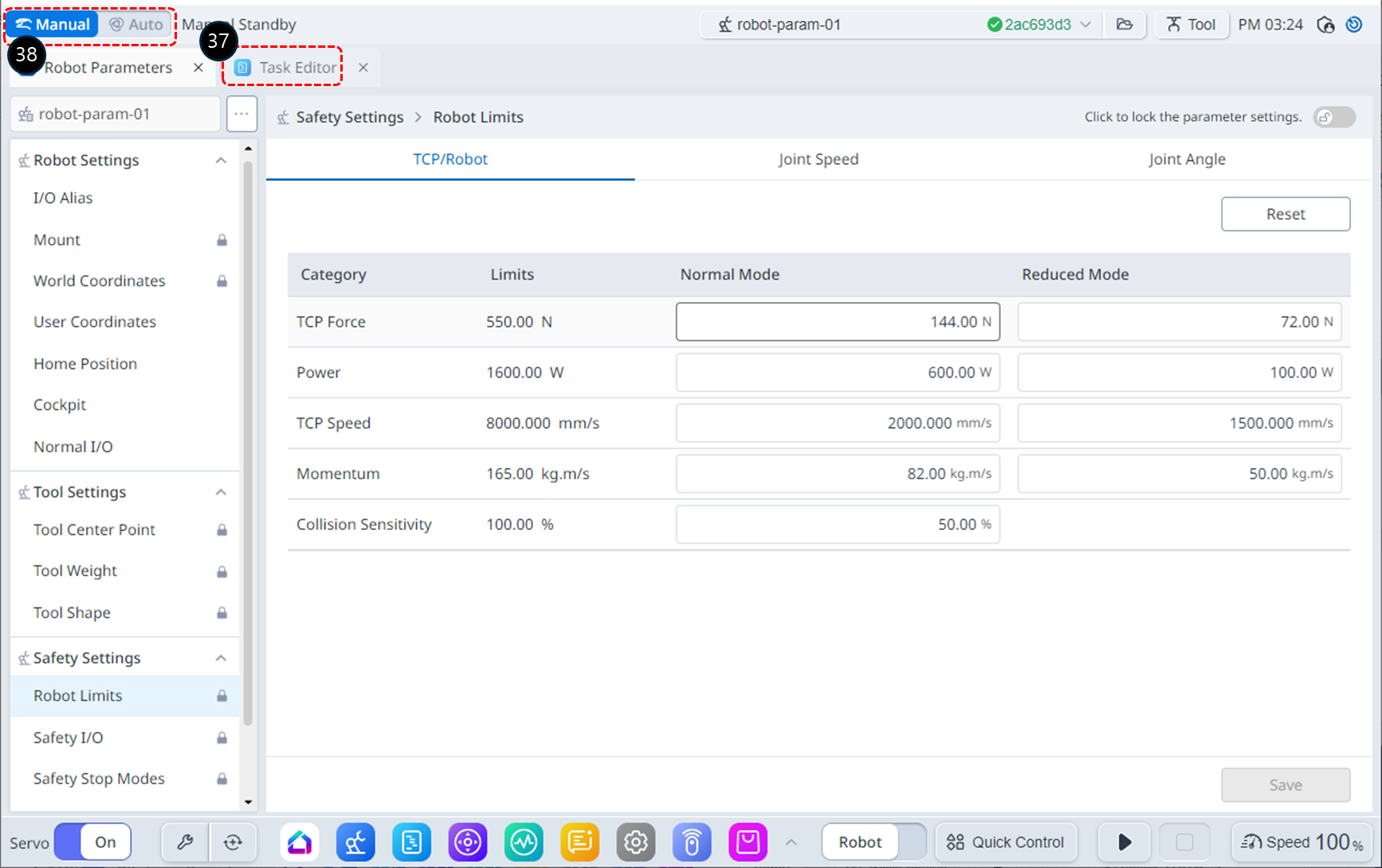
Po przejrzeniu zmian kliknij przycisk Zastosuj.
-
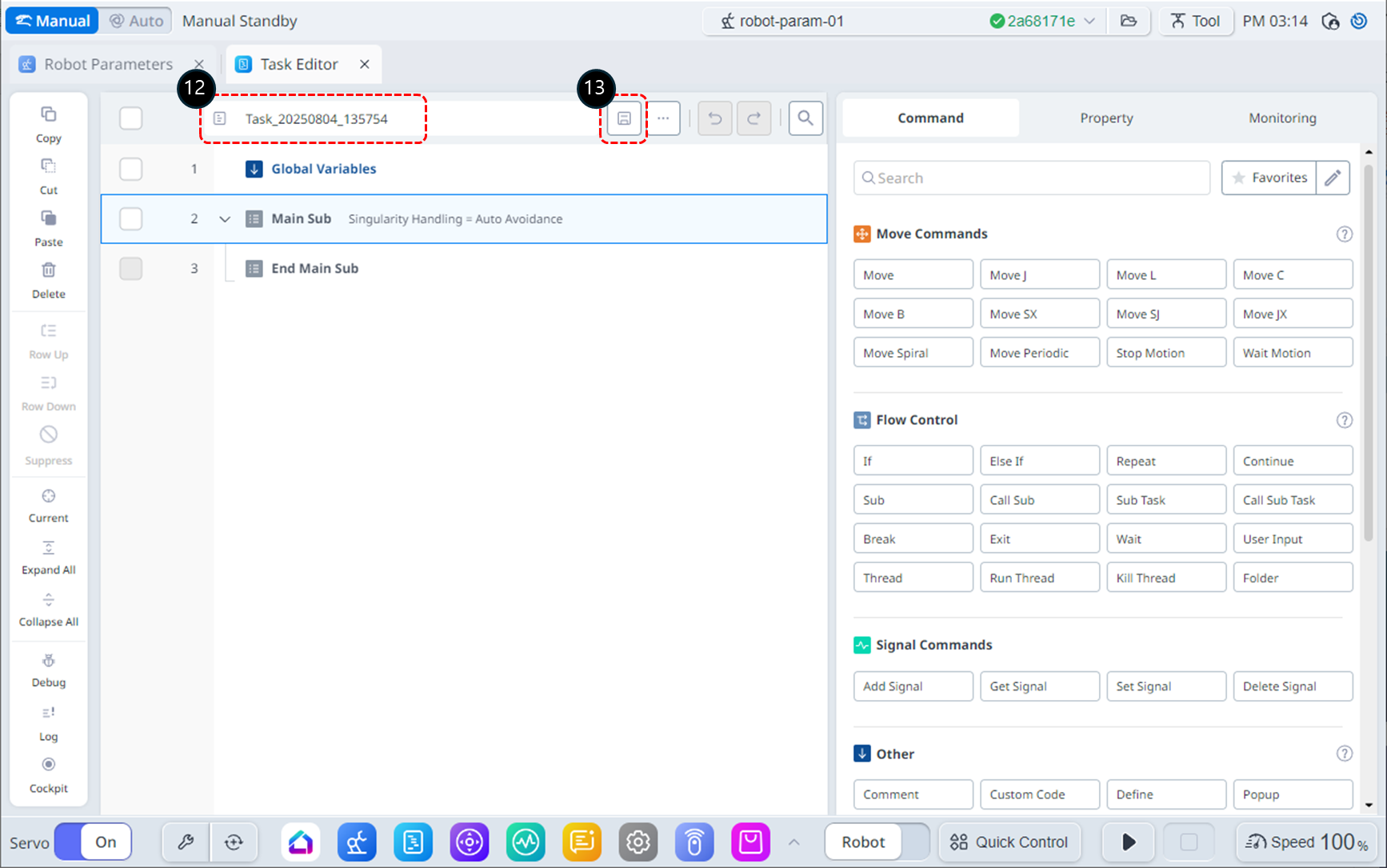
Z dolnego menu wybierz moduł Edytor zadań.
-
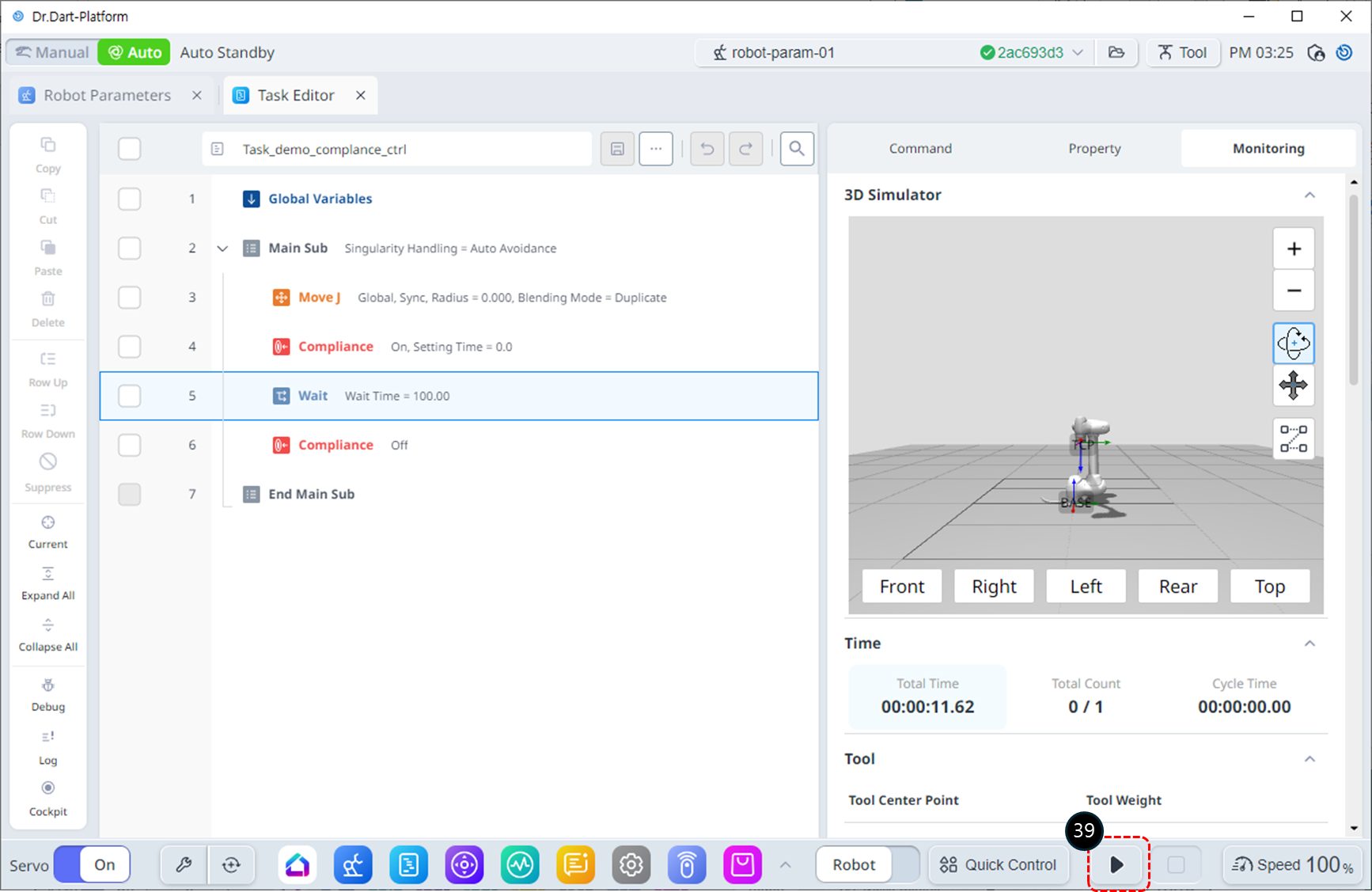
Zmień nazwę zadania na Task_demo_compliance_ctrl.
-
Zapisz zaktualizowaną nazwę zadania.
-
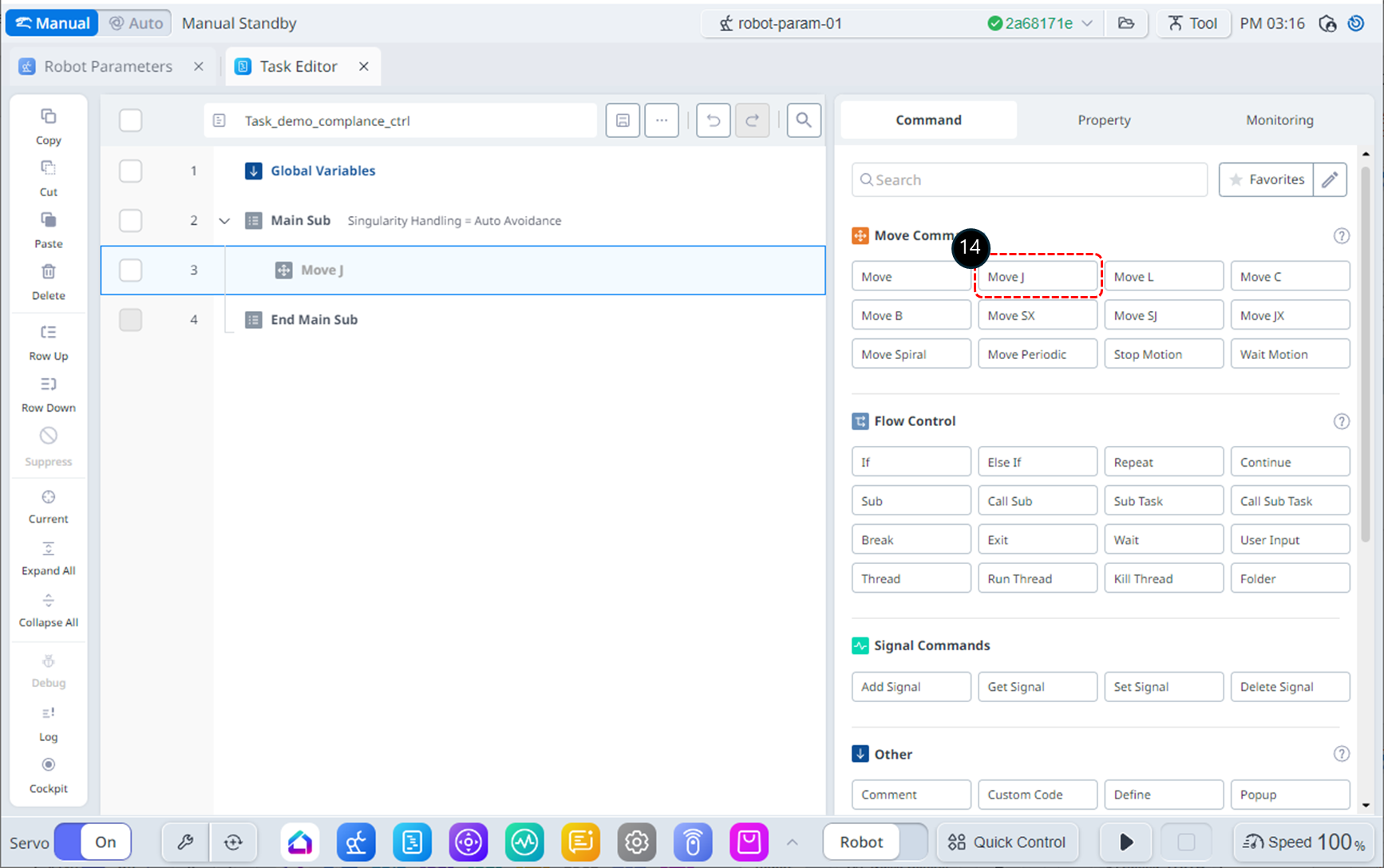
Dodaj polecenie MoveJ. To polecenie zostanie użyte do przesunięcia robota do pozycji wyjściowej w celu kontroli zgodności.
-
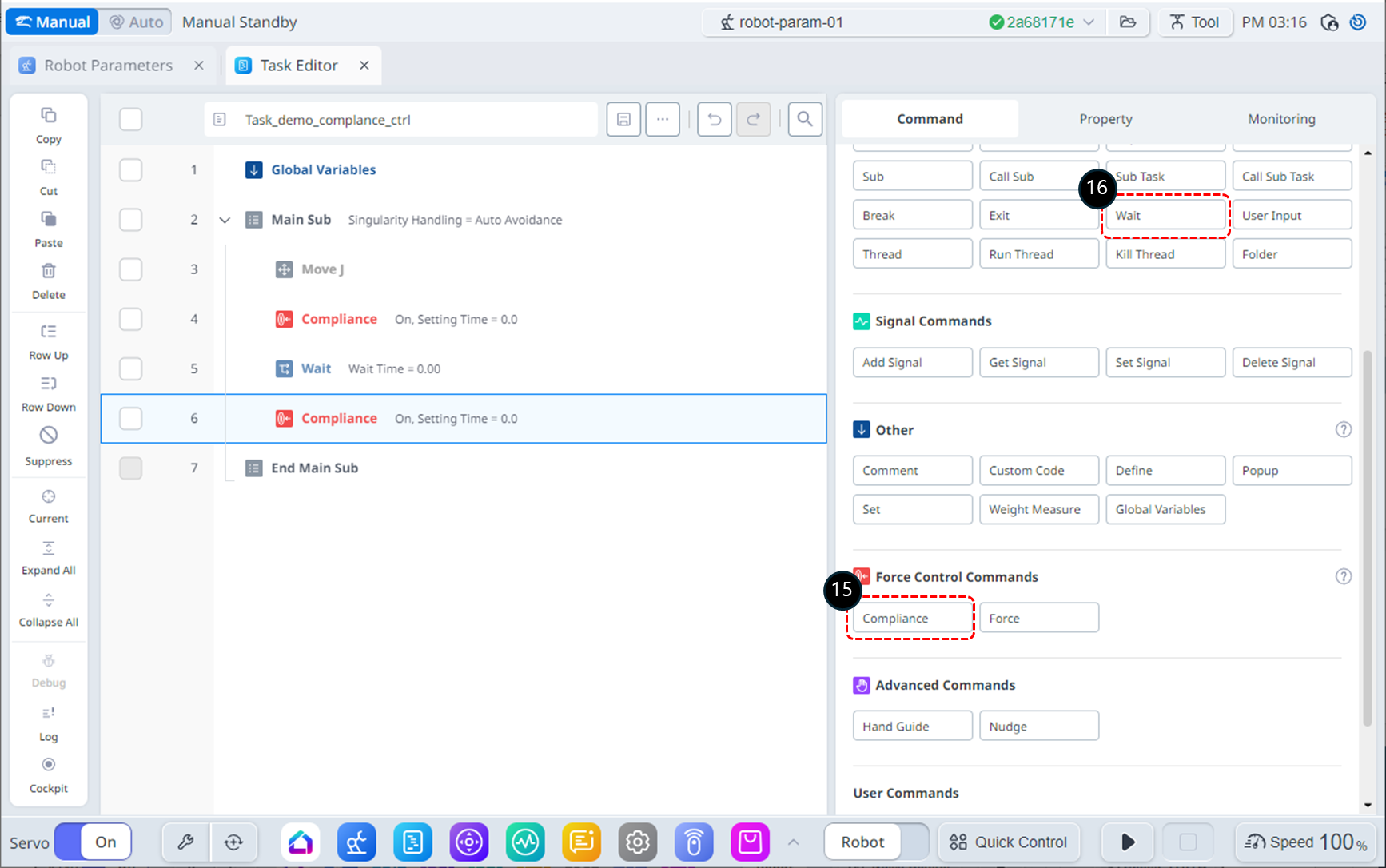
Dodaj dwa polecenia zgodności. Polecenia te będą używane do aktywacji i dezaktywacji kontroli zgodności.
-
Wstawić polecenie Wait między poleceniami Compliance. To polecenie wait zostanie użyte do utrzymania kontroli zgodności.
-
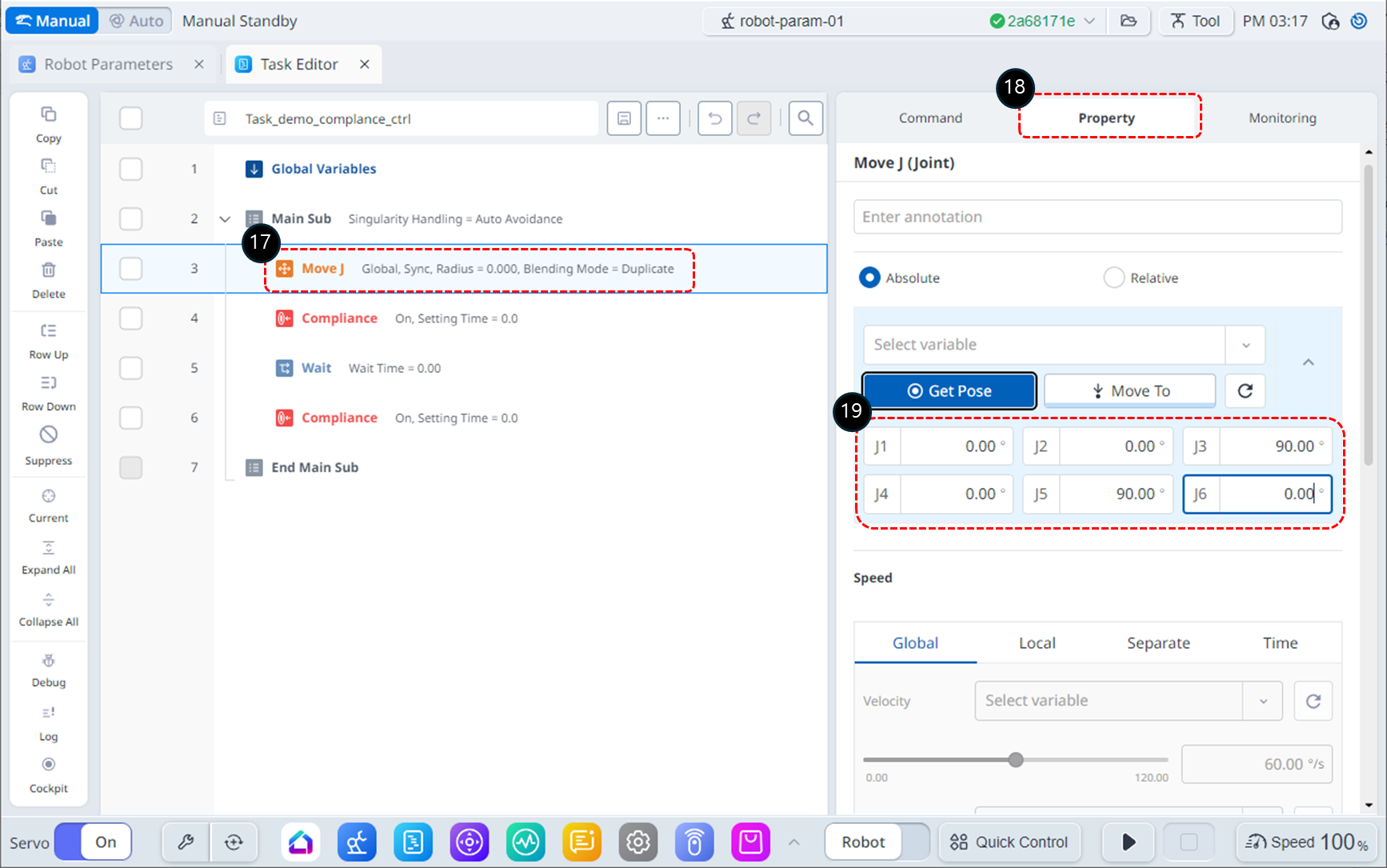
Wybrać polecenie MoveJ w linii 3.
-
Wybierz kartę Własność.
-
Zmienić położenie docelowe MoveJ na (, 90, 90, c) stopni. W zależności od miejsca instalacji robota, kąt J1 może być regulowany w razie potrzeby.
-
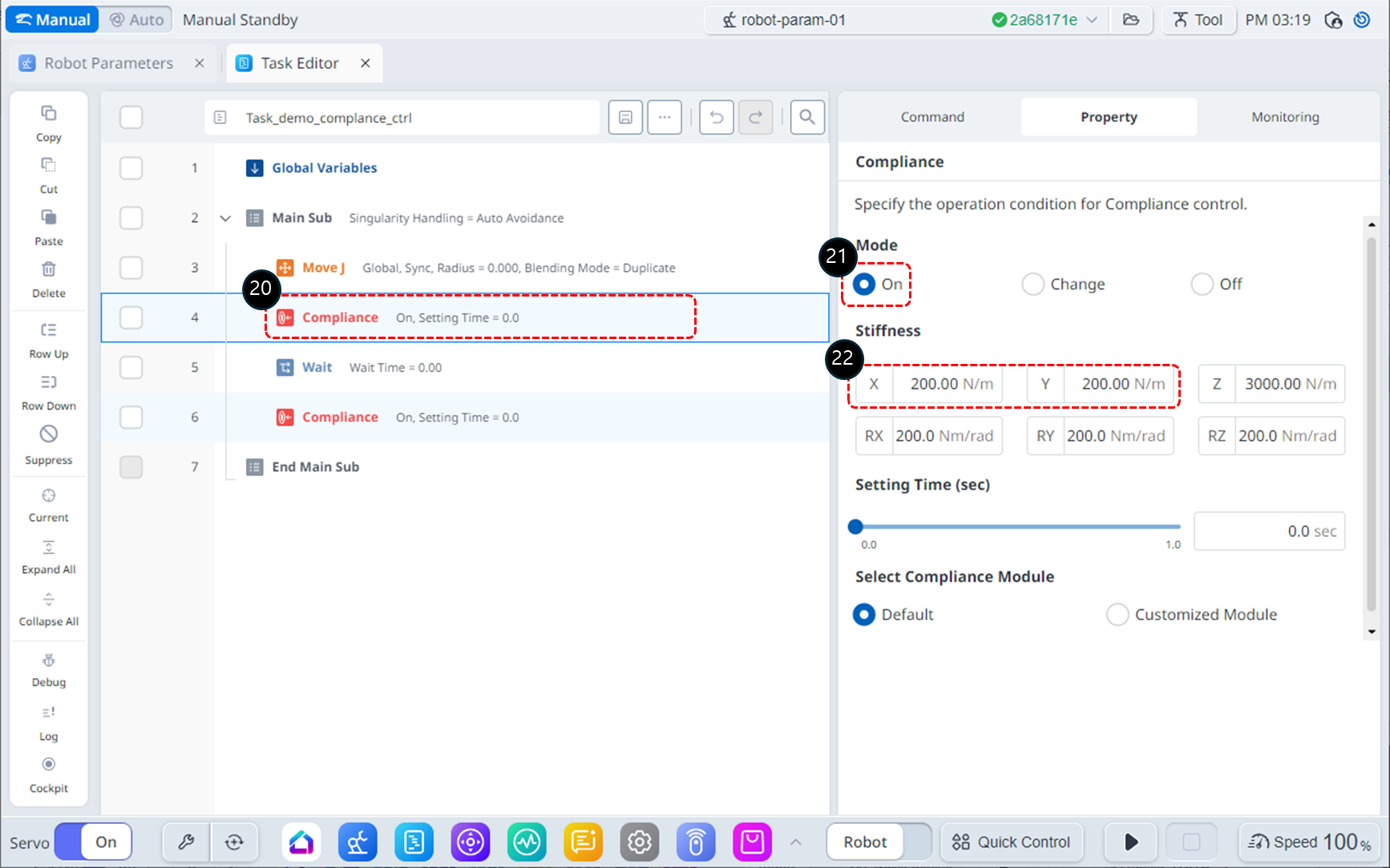
Wybierz polecenie Zgodność w wierszu 4.
-
Na karcie Właściwości ustawić Tryb w następujący sposób: Tryb on aktywuje kontrolę zgodności.
-
Tryb : Wł
-
-
Ustawić sztywność w następujący sposób: Zmniejsz sztywność w kierunkach X i Y, aby robot reagował łagodniej w tych kierunkach.
-
X : 200 N/m.
-
Y : 200 N/m.
-
Z : 3000 N/m (domyślnie)
-
RX, Ry, Rz: 200 Nm/rad (domyślnie)
-
-
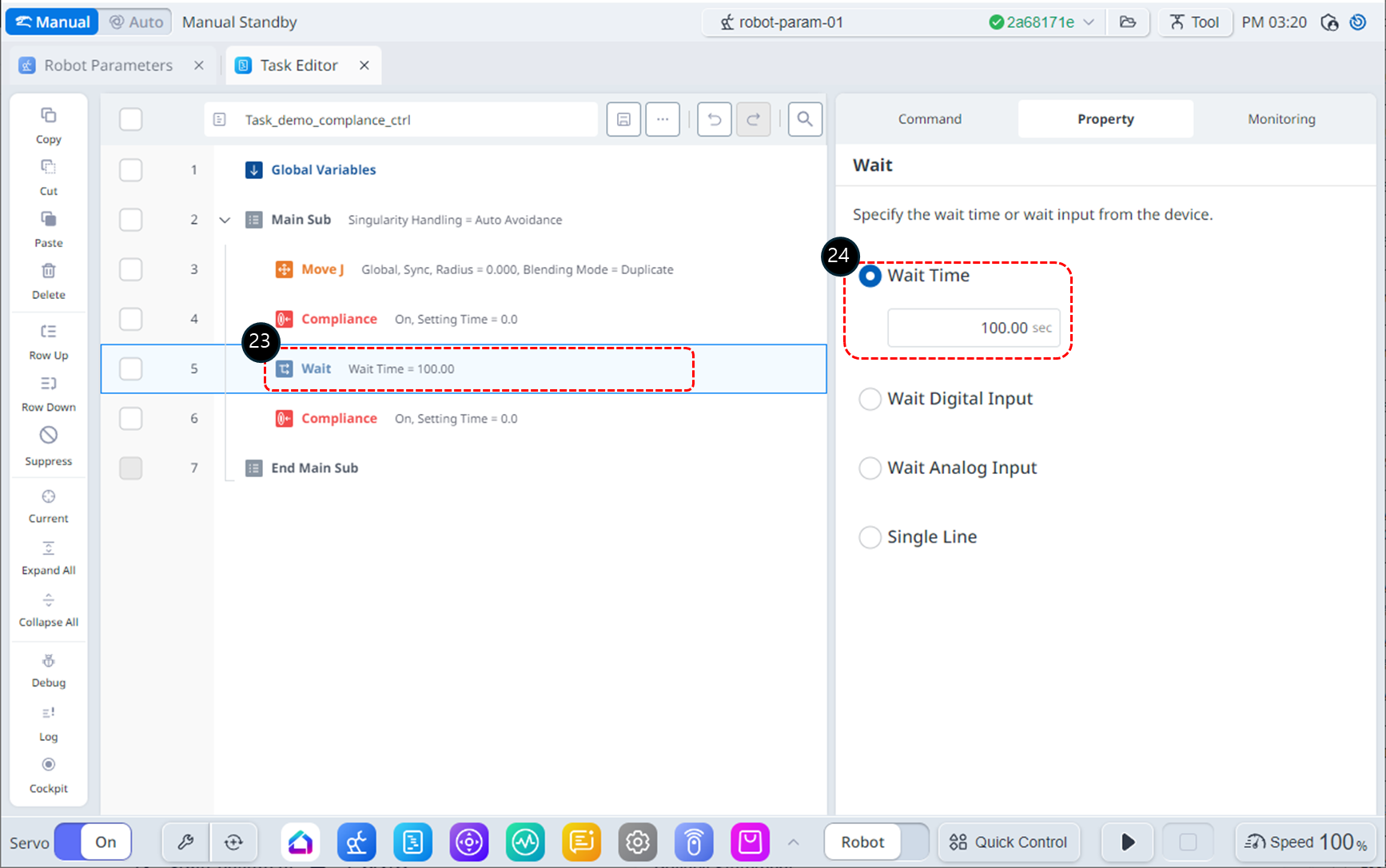
Wybierz polecenie Czekaj w linii 5.
-
Ustaw czas oczekiwania w następujący sposób.
-
Czas oczekiwania: 100 s.
-
-
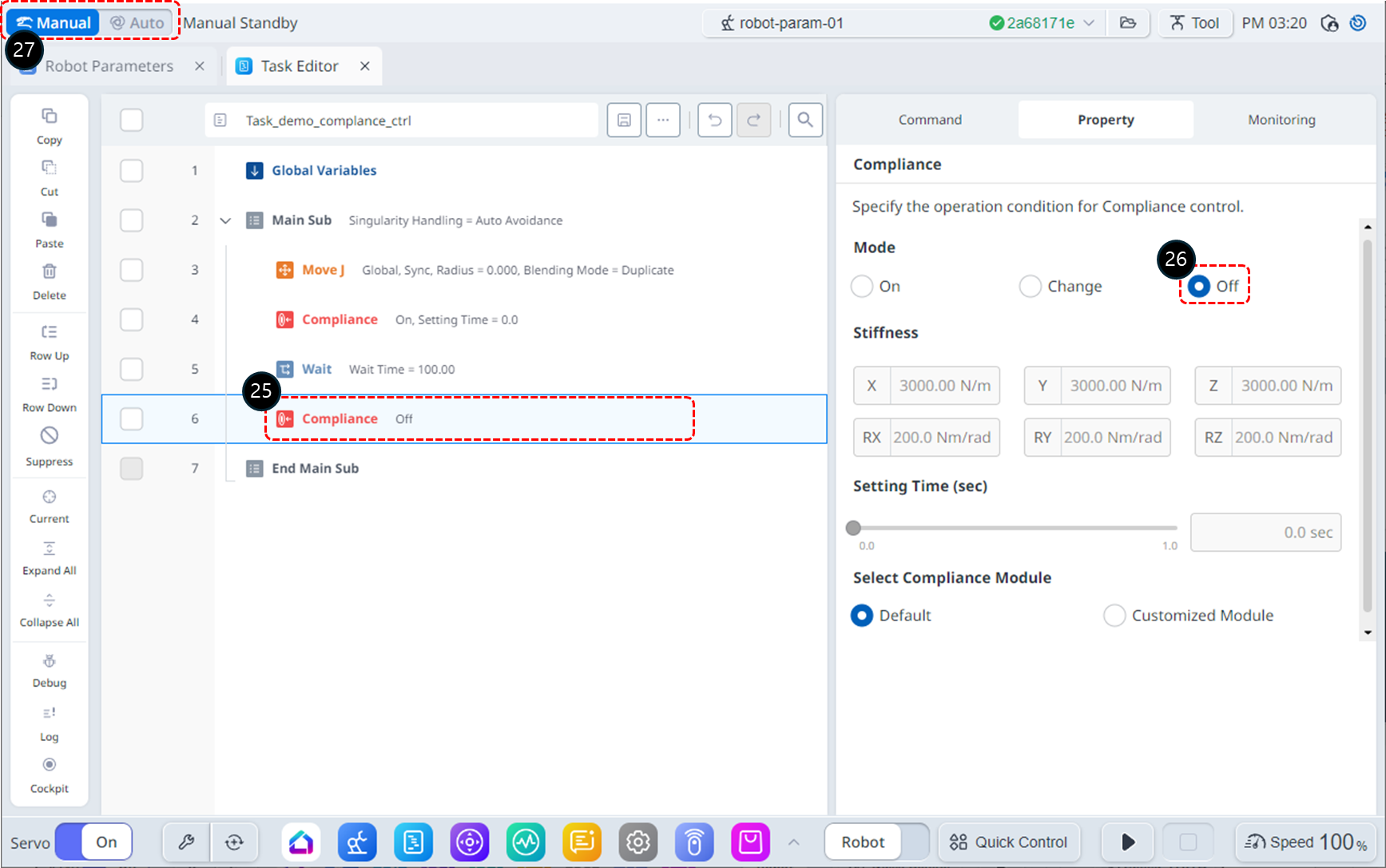
Wybierz polecenie Zgodność w wierszu 6.
-
Na karcie Właściwości ustawić Tryb w następujący sposób: Tryb Wył. Wyłącza kontrolę zgodności.
-
Tryb : Wył
-
-
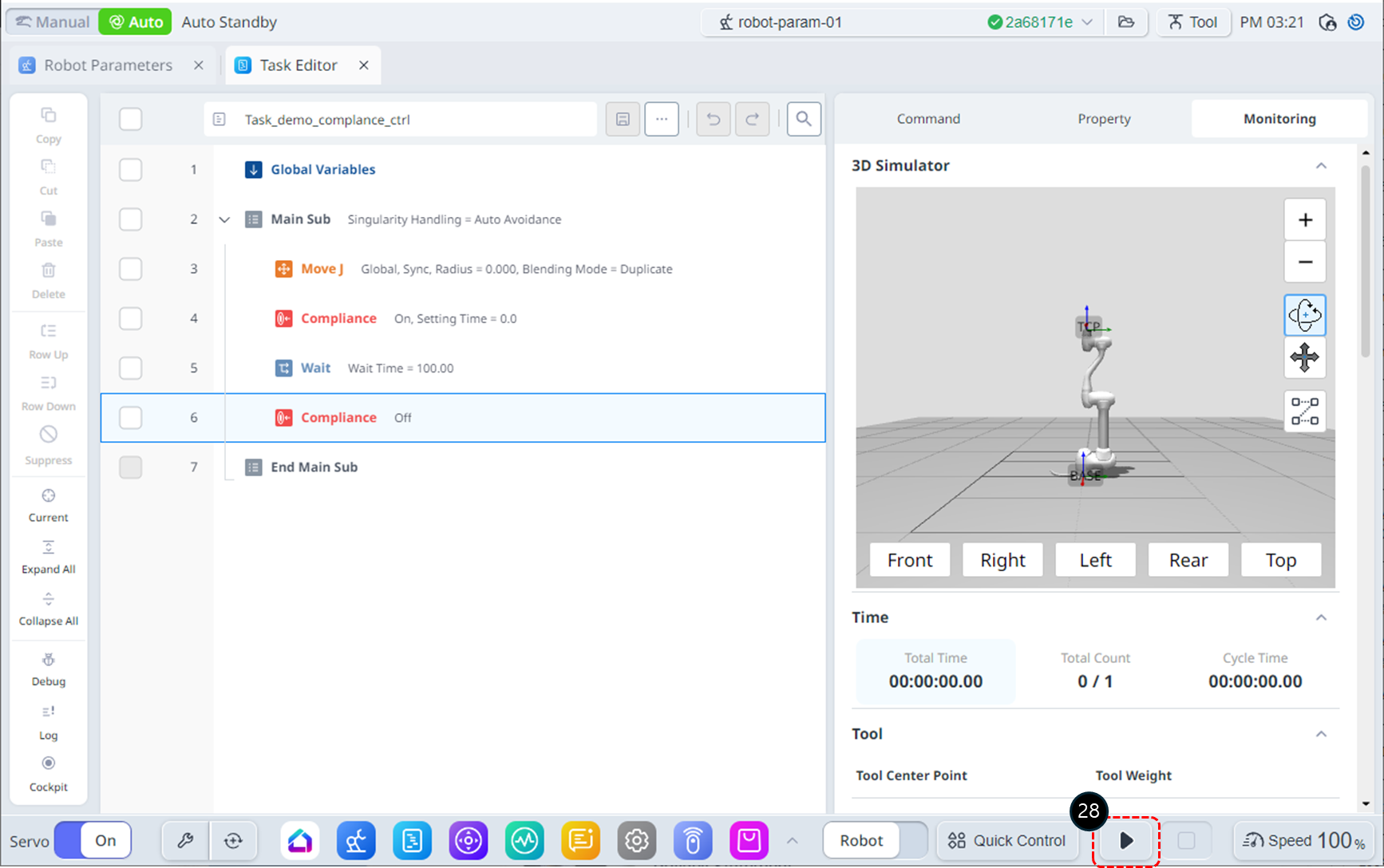
Zmień tryb pracy na Auto. Karta Właściwości automatycznie przełączy się na kartę Monitorowanie.
-
Kliknij przycisk Uruchom. Robot przesunie się do pozycji wyjściowej, zainicjuje kontrolę zgodności i pozostanie nieruchomy przez 100 sekund. W tym czasie delikatnie popchnij efektor końcowy robota w kierunku ciała robota. Robot zatrzyma się z błędem kolizyjnym (lub błędem TCP Force Limit). W stanie zatrzymania awaryjnego spowodowanym zderzeniem dioda LED robota wyświetli żółty kolor.
-
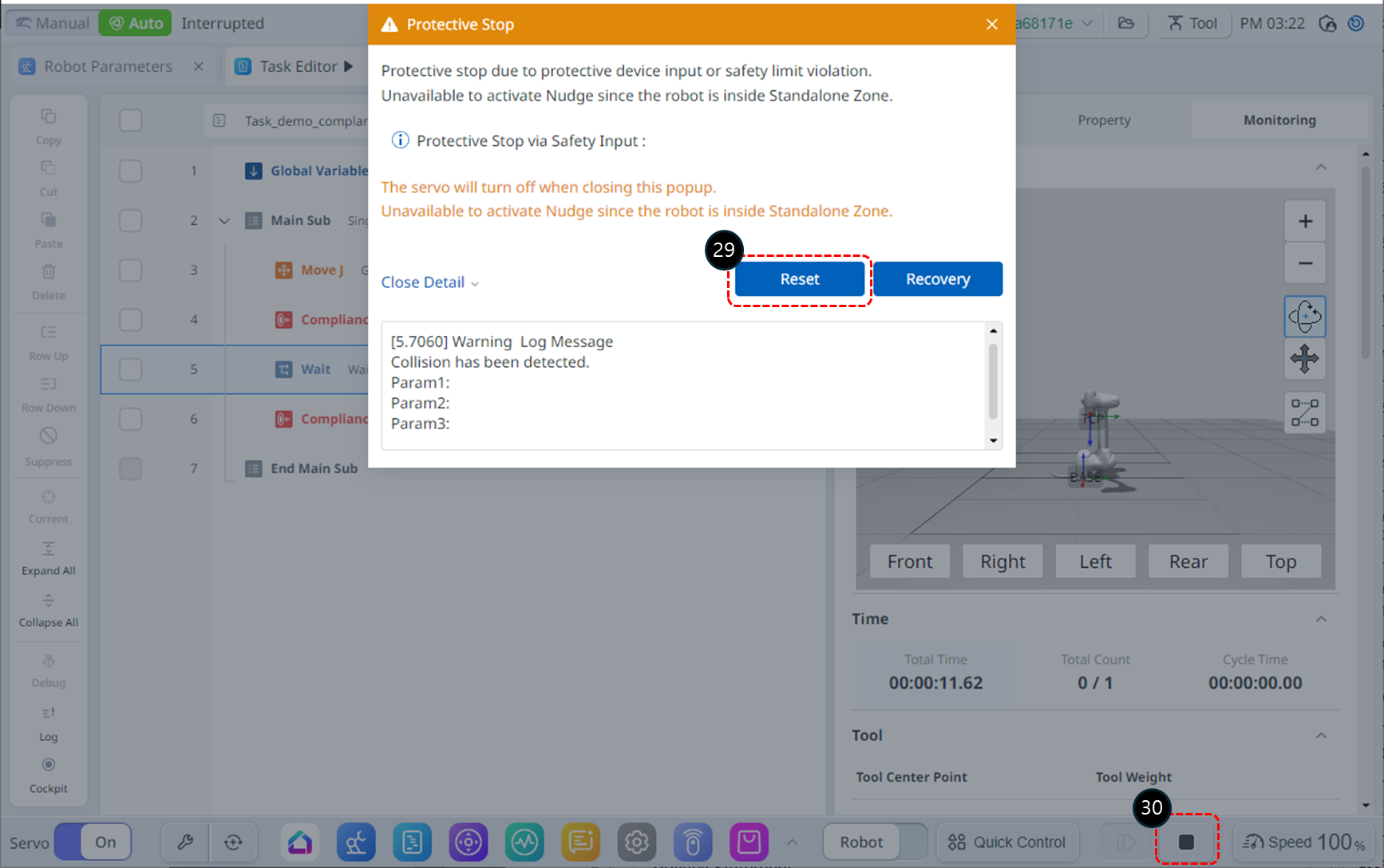
Kliknij przycisk Reset w oknie ostrzeżenia o zatrzymaniu bezpieczeństwa. Program zadania wznowi działanie.
-
Kliknij przycisk Stop, aby zakończyć program.
-
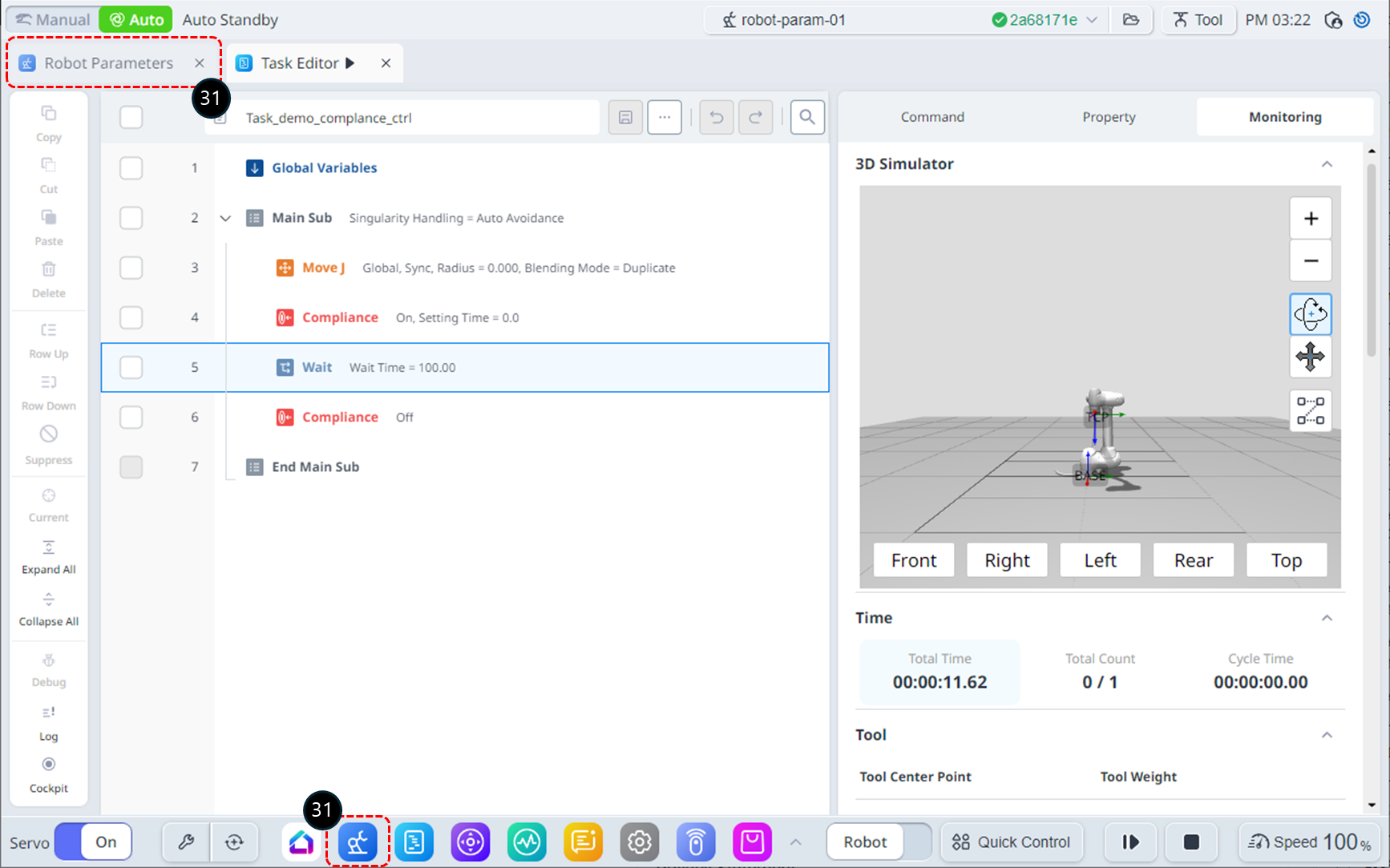
Aby rozwiązać problemy z kolizją, należy obniżyć czułość kolizji w ustawieniach bezpieczeństwa. (Jeśli występuje problem z limitem siły TCP, parametr siły TCP powinien zostać zwiększony.) Z dolnego menu wybierz moduł Parametry robota. Alternatywnie można wybrać kartę Moduł parametrów robota w lewym górnym rogu, która działa tak samo.
-
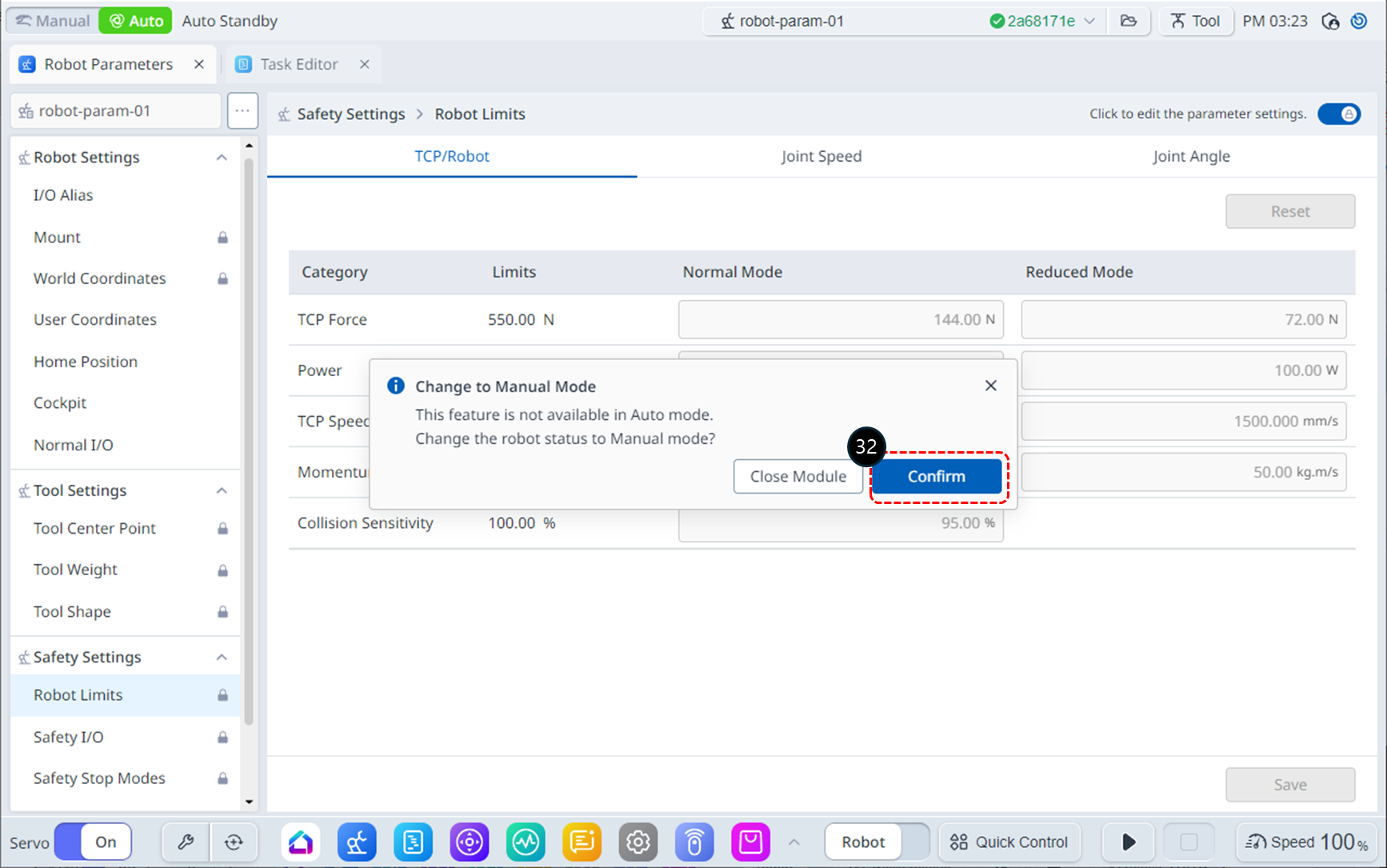
W trybie automatycznym dostęp do modułu parametrów robota spowoduje wyświetlenie okna powiadomień. Kliknij przycisk Potwierdź, aby przejść do trybu ręcznego.
-
Wybierz opcję Limity robota w menu Ustawienia bezpieczeństwa.
-
Włącz stan edycji parametrów. Jeśli pojawi się okno wprowadzania hasła, patrz kroki 6–7.
-
Zmień czułość kolizji na 50%.
-
Kliknij przycisk Zapisz, aby zapisać ustawienia. Jeśli pojawi się okno Przegląd parametrów robota, przejrzyj modyfikacje i kliknij przycisk Zastosuj.
-
Wybierz kartę Moduł Edytora zadań.
-
Aby uruchomić program zadań, należy przełączyć w tryb automatyczny.
Unknown Attachment
-
Kliknij przycisk Uruchom. W czasie oczekiwania delikatnie popchnij efektor końcowy robota w kierunku korpusu robota. Robot przesunie się z powodu siły pchającej, a po zwolnieniu ręki powróci do pierwotnej pozycji.