Wspólne
-
Efektywny obszar można wybrać jako wewnętrzny/zewnętrzny.
-
Typ kształtu można wybrać jako kula, Cylinder, Proboid, przechylona prostopadła prostopadła lub Pole wielopłaszczyznowe. Aby uzyskać więcej informacji, zobacz Przegląd ustawień limitu miejsca i strefy.
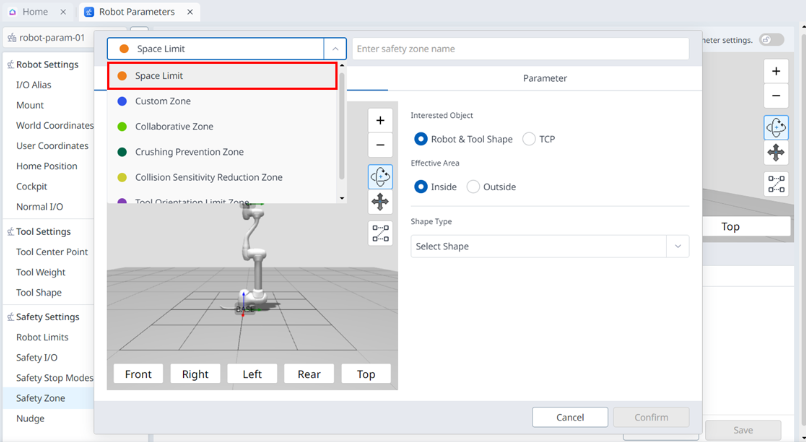
Ustawienie limitu przestrzeni
Limit przestrzeni to funkcja, która ustawia wirtualne ogrodzenie w najbardziej oddalonym obszarze robota. Możesz obsługiwać robota bez ustawiania limitu miejsca, ale zaleca się ustawienie limitu miejsca dla bezpiecznego użytkowania.
Można go ustawić, wybierając opcję „Ograniczenie miejsca” w menu Parametry robota > Strefa bezpieczeństwa > Dodaj > w lewym górnym rogu okna podręcznego.
-
Możesz wybrać jeden z kształtów robota i narzędzia/TCP dla interesującego obiektu.
-
Robot musi znajdować się w obszarze limitu miejsca ustawionym normalnie.
Uwaga
W zależności od tego, jak ją ustawisz, istnieje domyślna wartość rozszerzenia przestrzeni.
-
Ustawienie kształtu narzędzia, przy wyborze 'TCP' do kontroli, wartość marginesu TCP 0mm
-
Ustawienie kształtu narzędzia, po wybraniu opcji „Kształt robota i narzędzia” do kontroli, wartość marginesu TCP 0 mm
-
Nie ustawiono kształtu narzędzia, po wybraniu 'TCP' do kontroli, wartość marginesu TCP 0mm
-
Nie ustawiono kształtu narzędzia, gdy do kontroli wybieramy „Kształt robota i narzędzia”, wartość marginesu TCP 60 mm
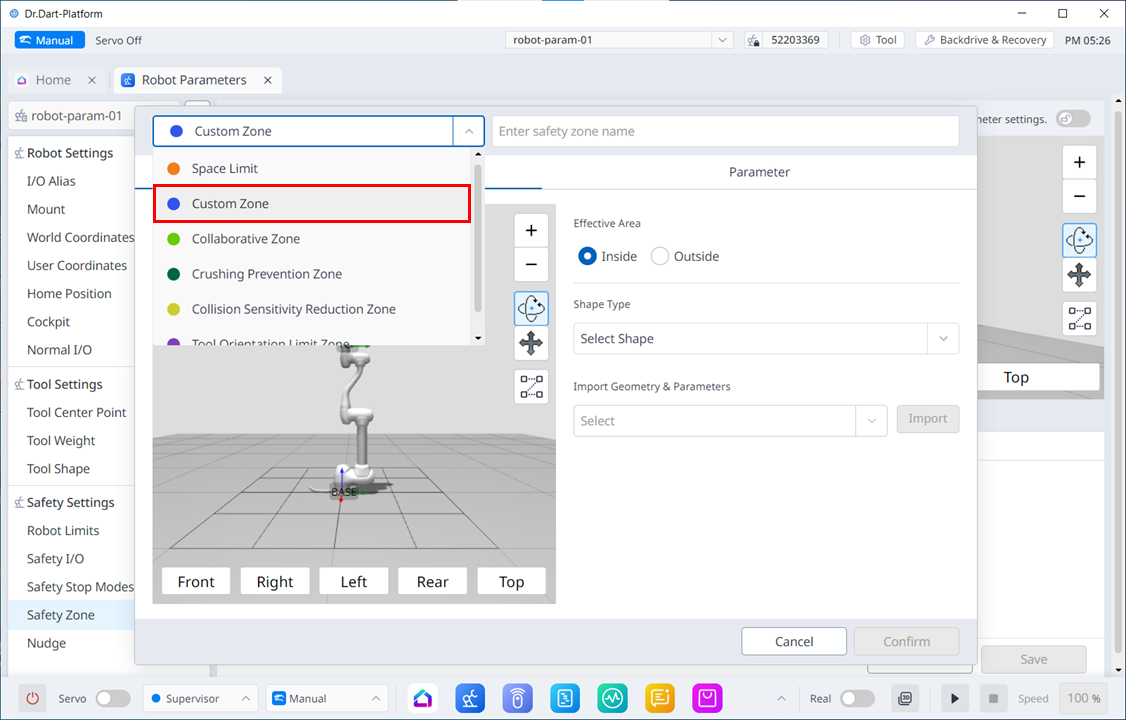
Ustawianie strefy niestandardowej
Strefa niestandardowa to najbardziej elastyczna strefa bezpieczeństwa, w której można dowolnie ustawiać parametry bezpieczeństwa. Możesz skonfigurować wszystkie ustawienia, takie jak limity robota, tryb bezpiecznego zatrzymania, prędkość połączenia i ograniczenia kąta, aby odpowiadały Twoim potrzebom.
Można go ustawić, wybierając opcję ‘Strefa niestandardowa’ w menu Parametry robota > Strefa bezpieczeństwa > Dodaj > wyskakujące okienko po lewej stronie.
Uwaga
Jeśli protokół TCP znajduje się w pozycji, w której wiele obszarów nakłada się na siebie, dla każdej funkcji bezpieczeństwa obowiązują następujące zasady.
-
Tryb normalny
-
Jeśli żadne strefy nie są ustawione na strefy o wysokim priorytecie, najbardziej ograniczona wartość graniczna bezpieczeństwa dla nakładających się stref będzie wartością odniesienia inspekcji.
-
Jeśli jedna strefa jest ustawiona jako strefa o wysokim priorytecie, wartość graniczna dla tej strefy jest wartością odniesienia inspekcji.
-
Jeśli dla stref o wysokim priorytecie określono więcej niż dwie strefy, najbardziej rozluźnioną wartością graniczną bezpieczeństwa dla stref będą kryteria kontroli.
-
-
Tryb redukcji
-
Jeśli żadne strefy nie są ustawione na strefy o wysokim priorytecie, najbardziej ograniczona wartość graniczna bezpieczeństwa dla nakładających się stref będzie wartością odniesienia inspekcji.
-
Jeśli jedna strefa jest ustawiona na strefę o wysokim priorytecie, opcja pominięcia dla tej strefy określa wartość odniesienia inspekcji.
-
Jeśli opcja pominięcia nie jest zaznaczona, najbardziej ograniczona wartość graniczna bezpieczeństwa między strefą wysokiego priorytetu a globalnym limitem zredukowanym będzie wartością odniesienia kontroli.
-
Jeśli opcja pominięcia jest zaznaczona, strefa wysokiego priorytetu jest wartością odniesienia kontroli.
-
-
Jeśli dla strefy o wysokim priorytecie ustawiono więcej niż jedną strefę, opcja pominięcia dla tej strefy określa wartość odniesienia inspekcji.
-
Jeśli opcja pominięcia nie jest zaznaczona dla którejkolwiek z stref o wysokim priorytecie, najwyższa strefa priorytetowa , dla której opcja pominięcia nie jest zaznaczona, a najbardziej ograniczona wartość graniczna bezpieczeństwa globalnego ograniczenia będzie wartością odniesienia inspekcji.
-
Jeśli opcja pominięcia dla wszystkich stref o wysokim priorytecie jest zaznaczona, najbardziej rozluźnioną wartością graniczną bezpieczeństwa wśród stref o wysokim priorytecie będą kryteria kontroli.
-
-
Ustawianie strefy współpracy
Strefa współpracy to strefa zaprojektowana do bezpiecznej pracy z robotami. Zapewnia on limity robotom, takie jak szybkość zwalniania wymagana do pracy na bliskim zasięgu oraz ustawienia trybu bezpiecznego zatrzymania.
Można go ustawić, wybierając opcję ‘Strefa współpracy’ w menu Parametry robota > Strefa bezpieczeństwa > Dodaj > Wyskakujące okienko po lewej stronie.
Unknown Attachment
Ustawianie strefy zapobiegania zgniataniu
Strefa zapobiegania zmiażdżeniu to strefa zapobiegająca zagrożeniom zmiażdżeniem, które mogą wystąpić między robotem a innymi przedmiotami. W tej strefie, po przekroczeniu granicy kolizji i siły zewnętrznej, tryb zatrzymania bezpieczeństwa jest ustawiony na RS1 (Reflex Stop), a czułość kolizji jest ustawiona na 100%, tak aby w przypadku wykrycia kolizji robot reagował tak wrażliwie, jak to możliwe na siłę zewnętrzną, a następnie bezpiecznie zatrzymuje się poprzez reakcję pływającą.
Można go ustawić, wybierając opcję „Strefa zapobiegania zgniataniu” w menu Parametry robota > Strefa bezpieczeństwa > Dodaj > Wyskakujące w lewym górnym rogu.
Unknown Attachment
Ustawianie strefy redukcji czułości kolizji
Strefa redukcji czułości kolizji to strefa, która dostosowuje czułość wykrywania kolizji robota podczas pracy z różnymi materiałami lub powierzchniami. Zapewnia ustawienia czułości siły i kolizji.
Można go ustawić, wybierając opcję ‘Strefa redukcji czułości kolizji’ w menu Parametry robota > Strefa bezpieczeństwa > Dodaj > w lewym górnym rogu okna wyskakującego.
Unknown Attachment
Ustawianie strefy limitu orientacji narzędzia
Strefa limitu orientacji narzędzia jest strefą, która ogranicza orientację TCP. Zapewnia, że TCP jest skierowany w określonym kierunku i zapobiega jego skierowaniu w stronę niebezpiecznego kierunku poprzez zdefiniowanie marginesu kierunku i kąta.
Można go ustawić, wybierając opcję ‘Strefa limitu orientacji narzędzia’ w menu Parametry robota > Strefa bezpieczna > Dodaj > w lewym górnym rogu wyskakującego okienka.
Unknown Attachment