Uwaga
Przed przystąpieniem do próbkowania próbki należy przeczytać i przestrzegać środkówostrożności . Więcej informacji można znaleźć W CZĘŚCI pierwszej. Instrukcja bezpieczeństwa.
Uwaga
Ta próbka wymaga pliku programu Task Writer utworzonego w przykładach poleceń TRY Compliance
-
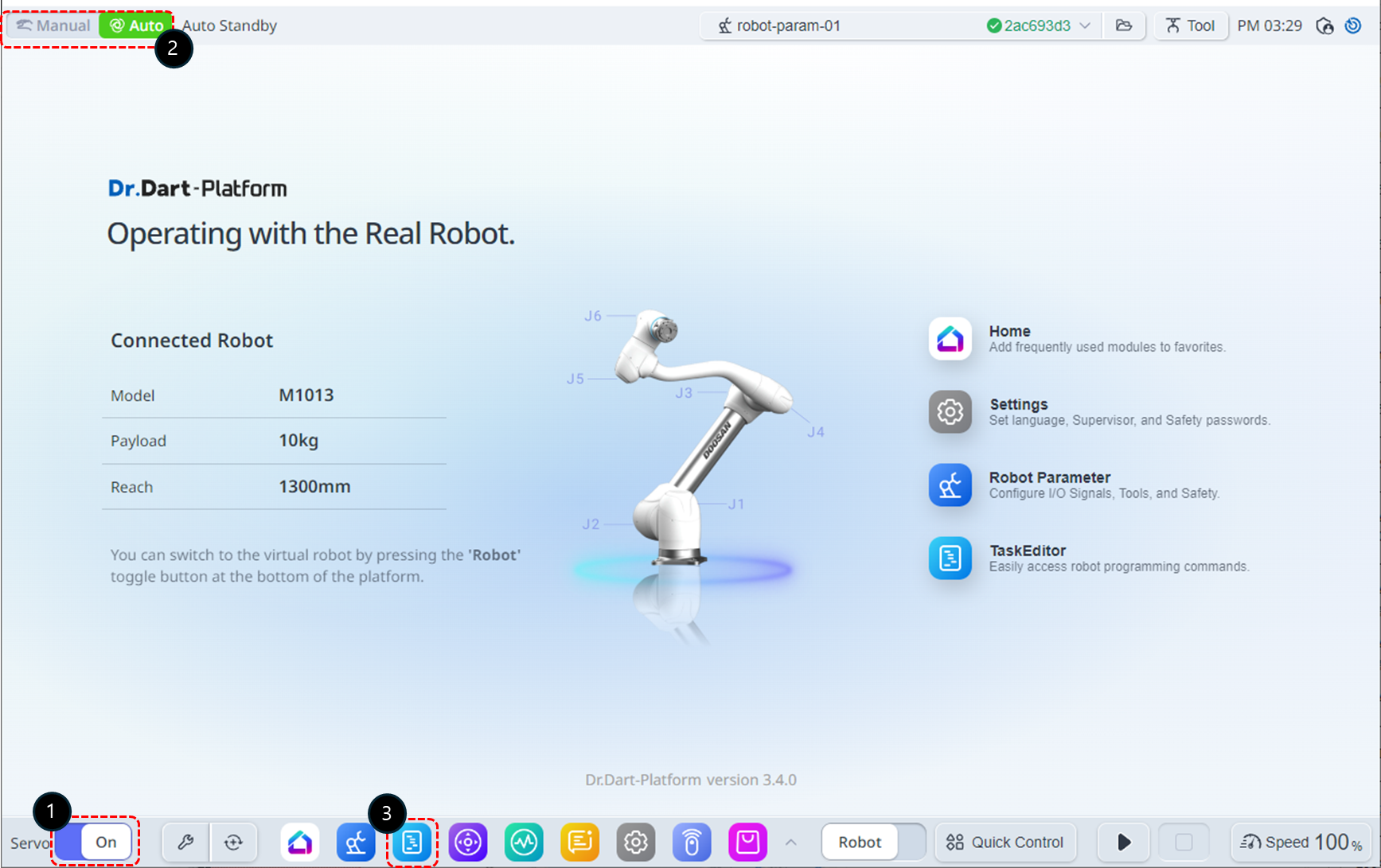
Zmień stan serwomechanizmu na Wł.
-
Przełączyć tryb pracy na tryb ręczny.
-
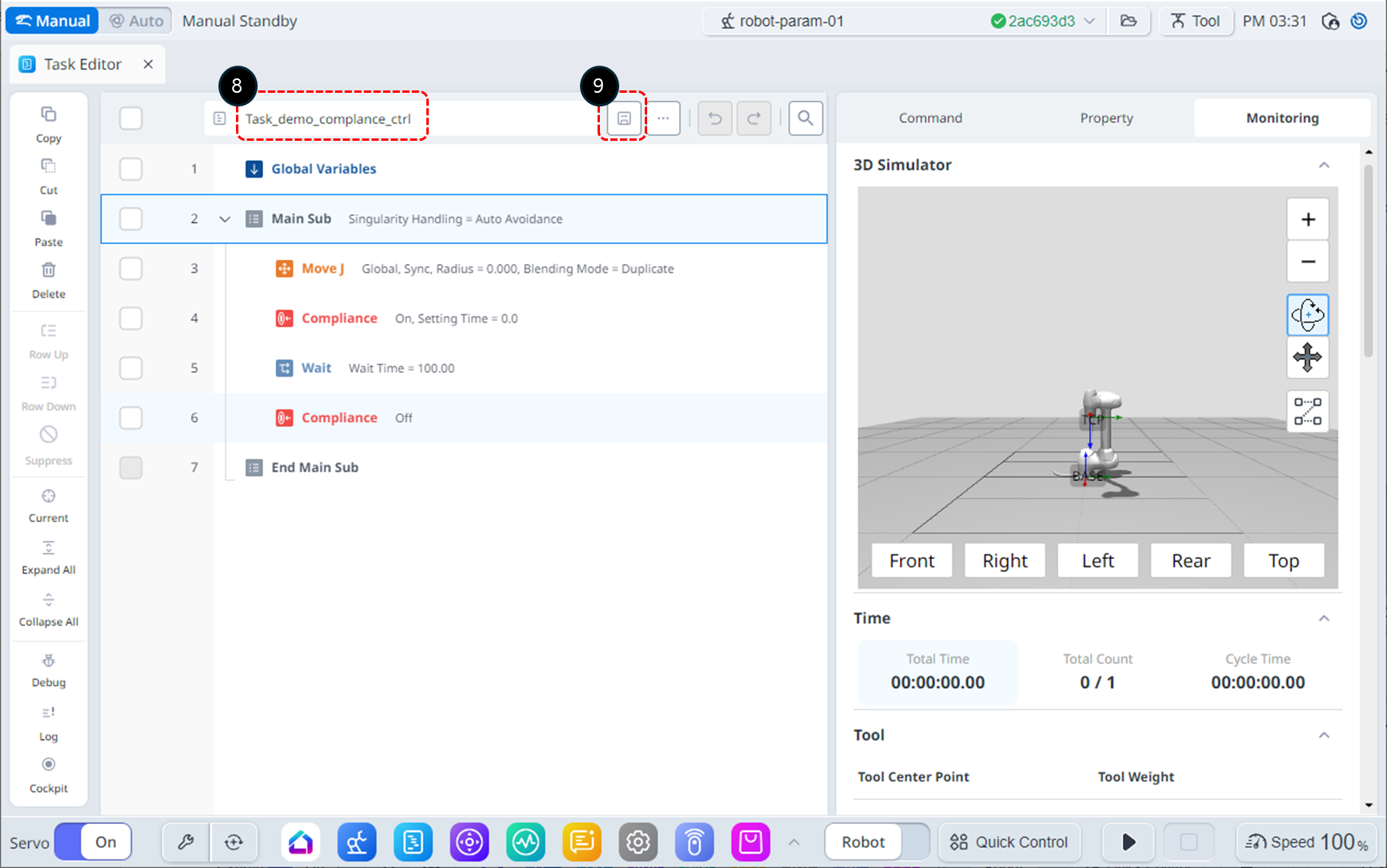
Z dolnego menu wybierz moduł Edytor zadań.
-
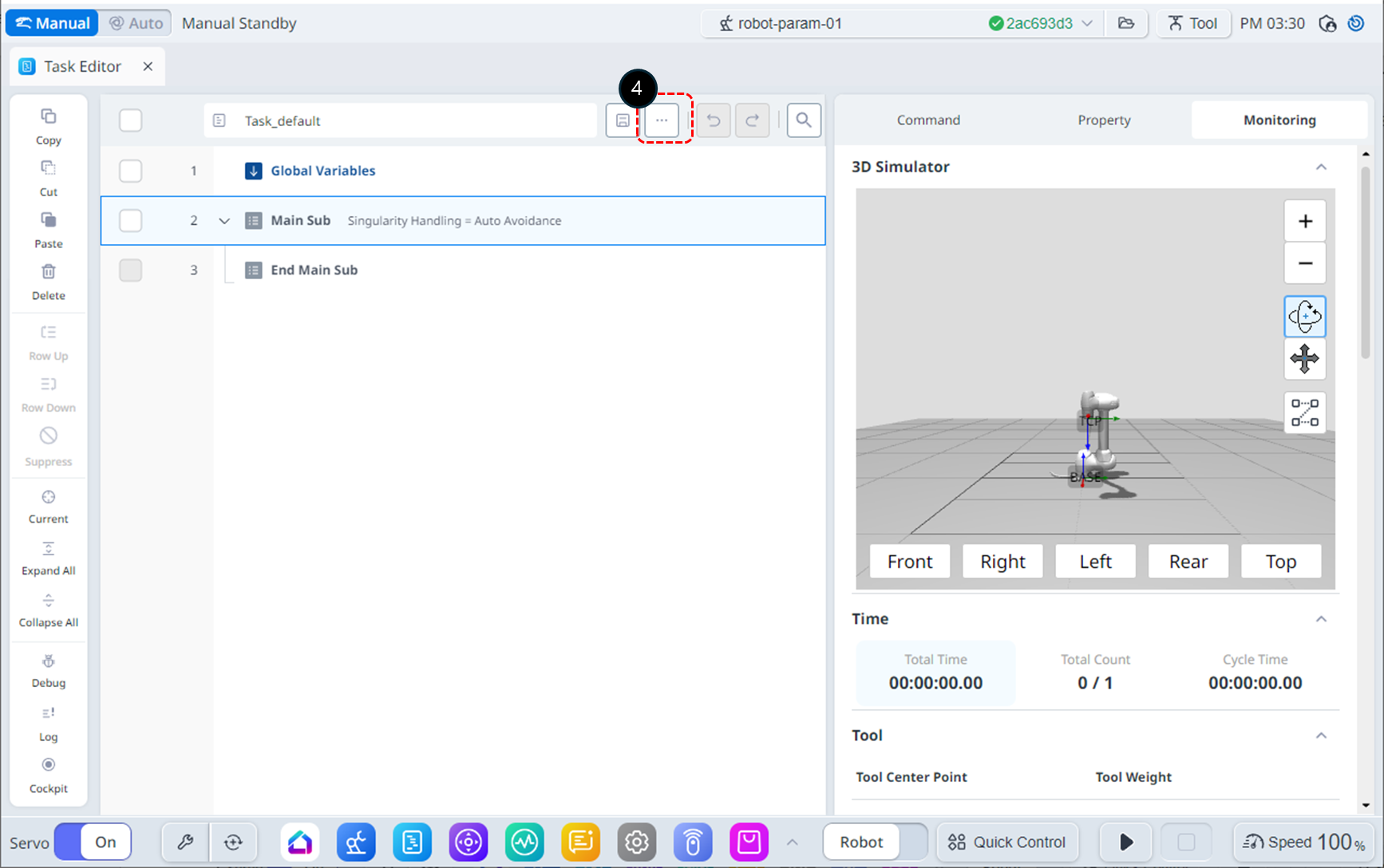
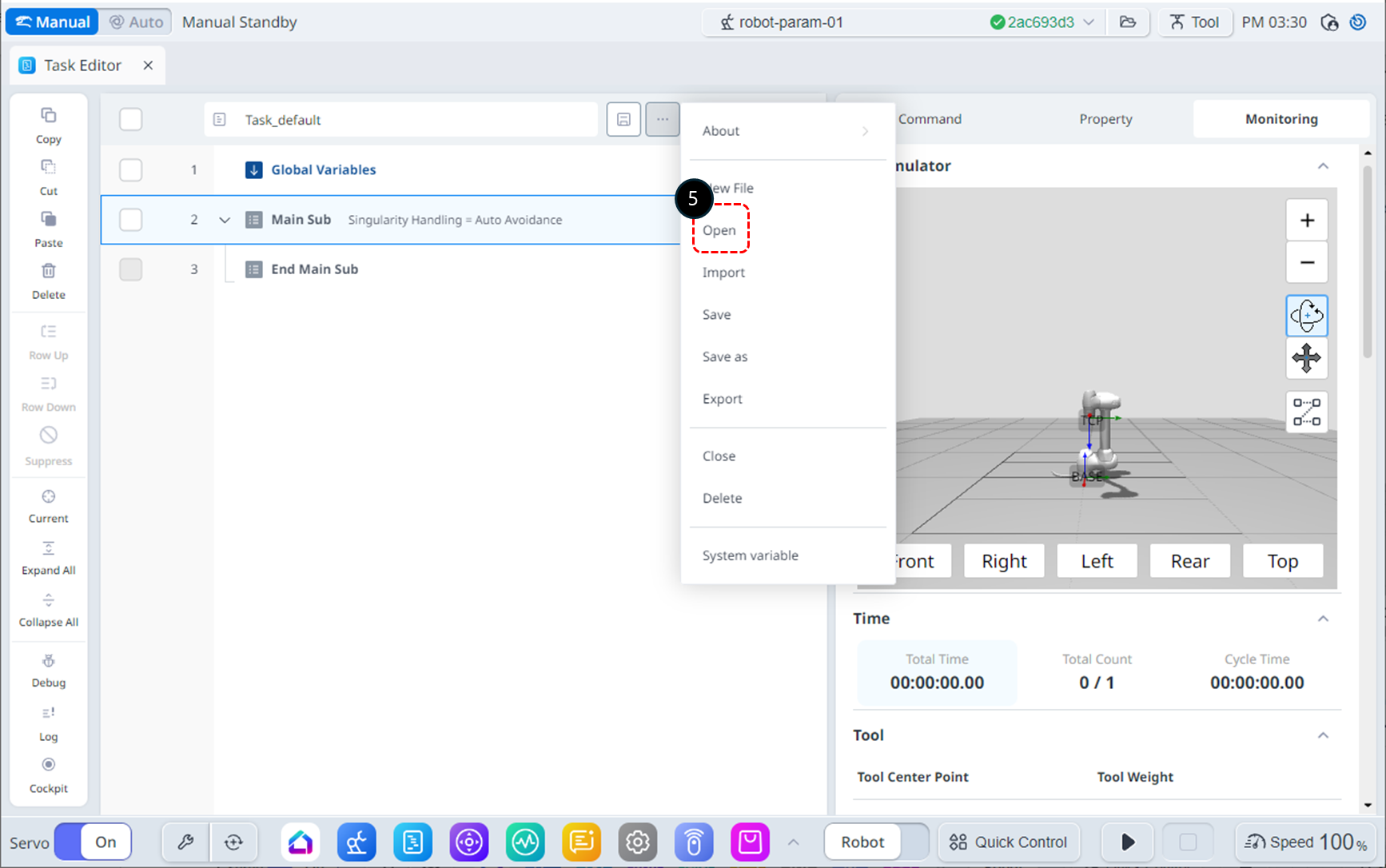
Kliknij przycisk Plik.
-
Kliknij przycisk Otwórz.
-
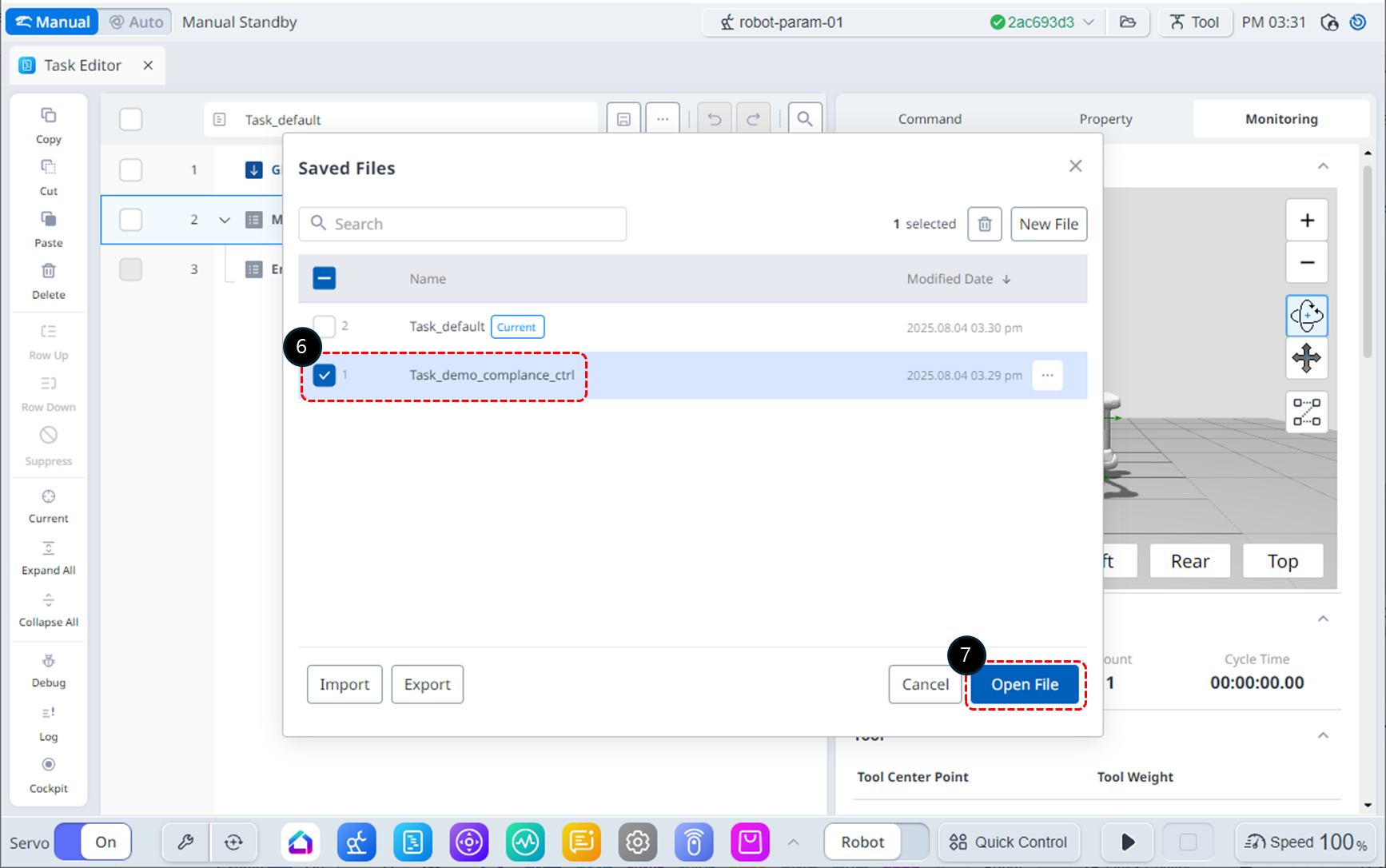
Wybierz plik Task_demo_compliance_ctrl utworzony w próbkach polecenia Try Compliance.
-
Kliknij przycisk Otwórz plik.
-
Zmień nazwę pliku na Task_demo_force_ctrl.
-
Kliknij przycisk Zapisz, aby zapisać nazwę pliku.
-
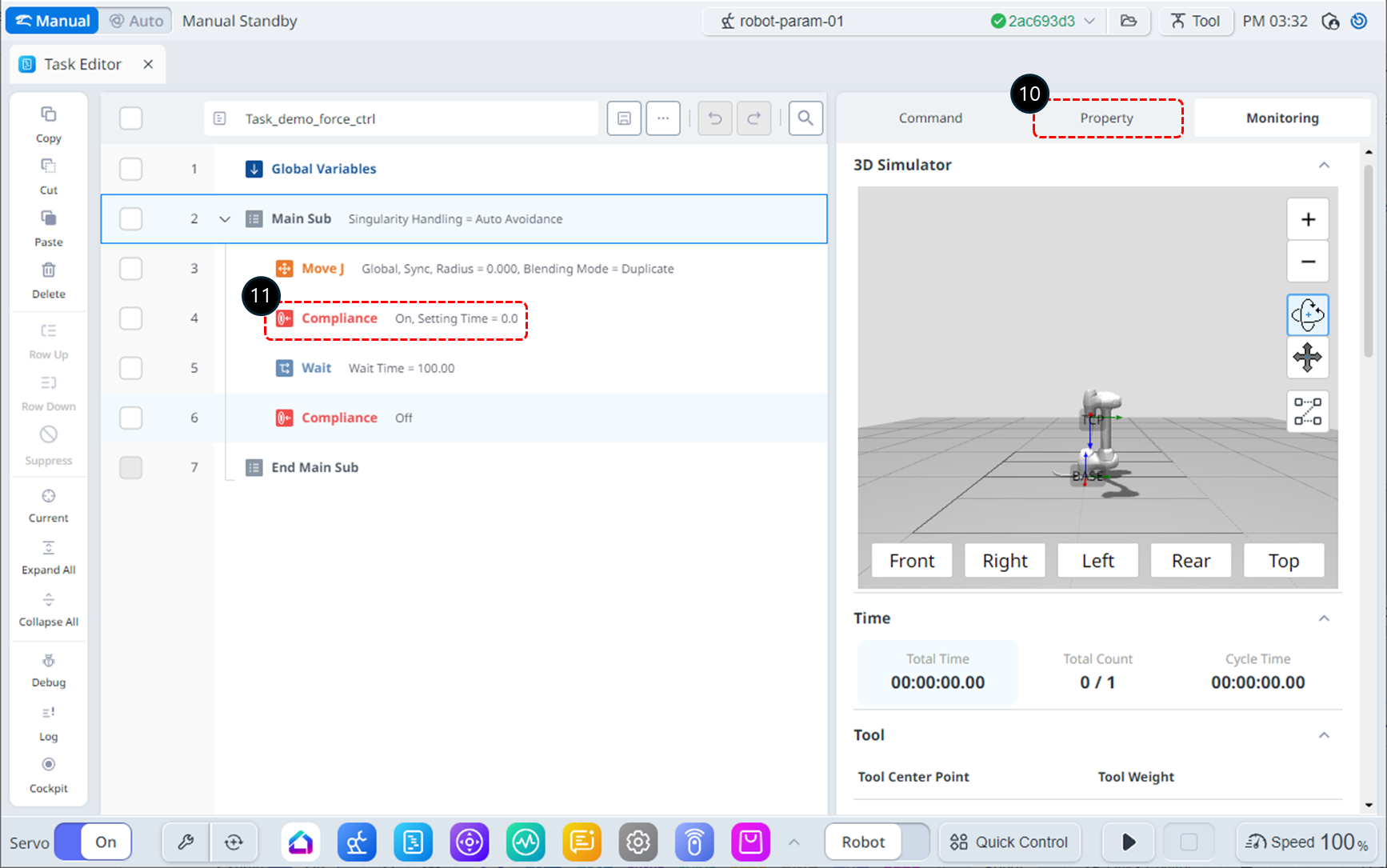
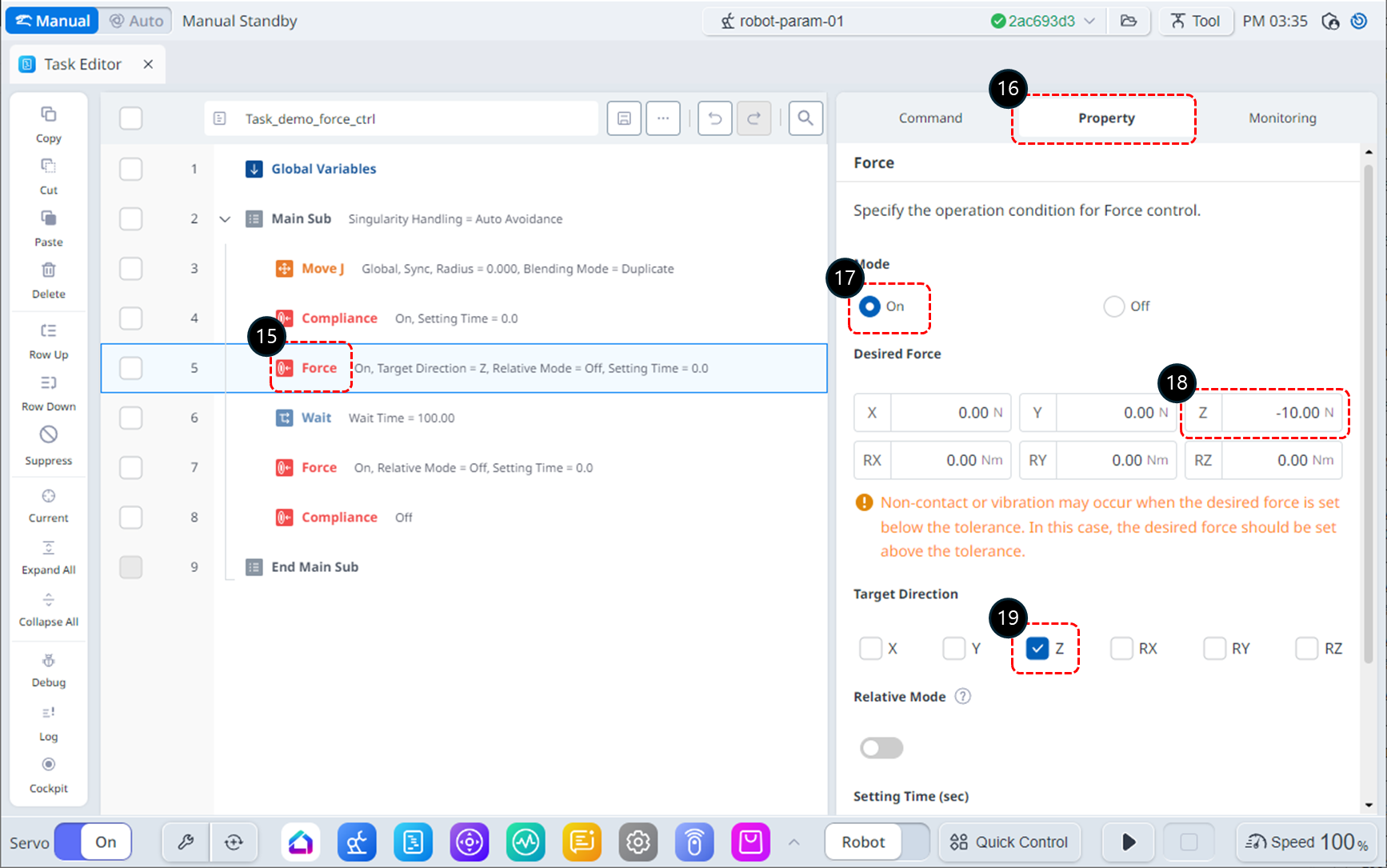
Wybrać kartę Własność.
-
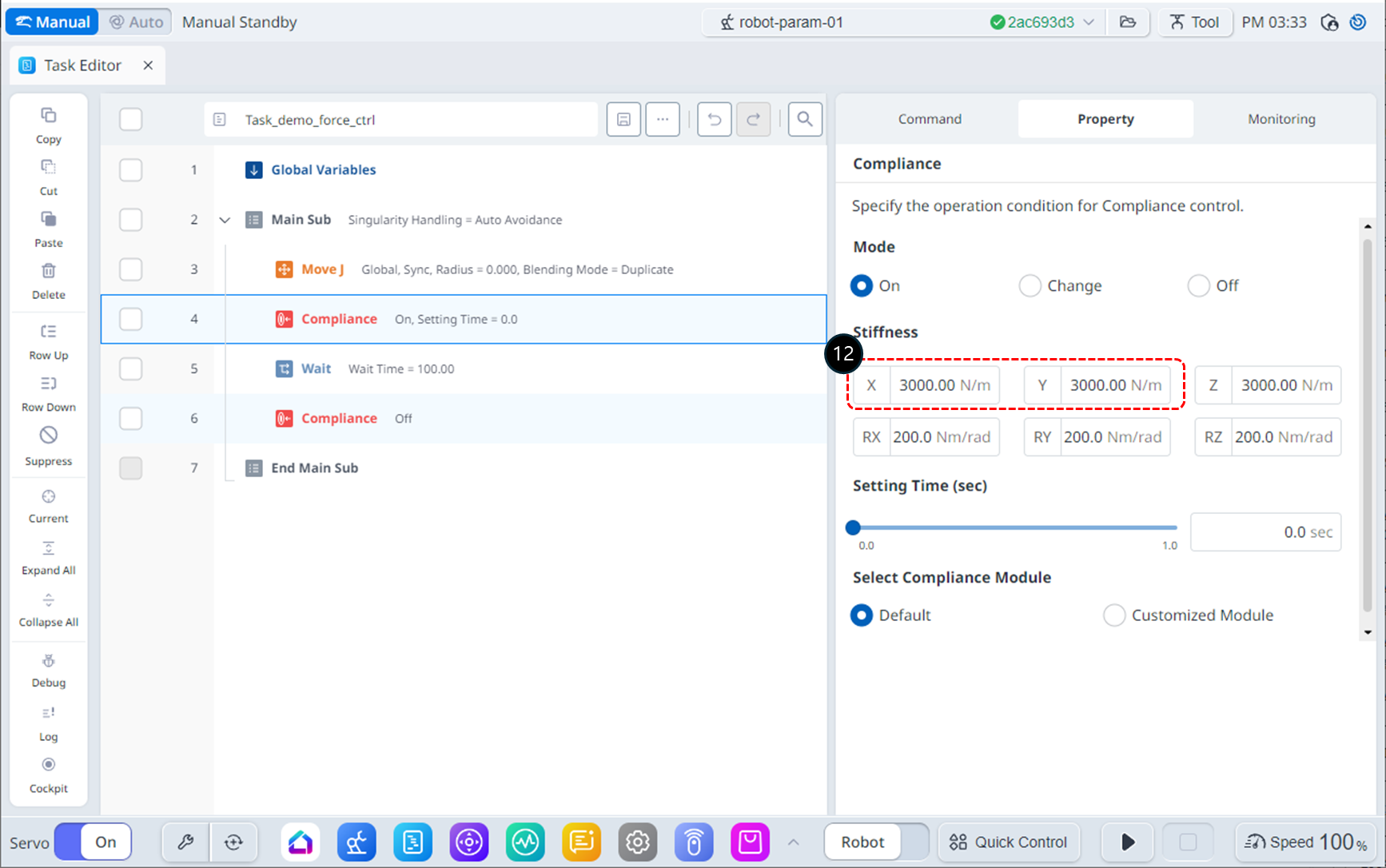
Wybierz polecenie Zgodność w 4 wierszu.
-
Ustawić sztywność na wartości domyślne w następujący sposób.
-
X, Y, Z: 3000 N/m (domyślnie)
-
RX, Ry, Rz: 200 Nm/rad (domyślnie)
-
-
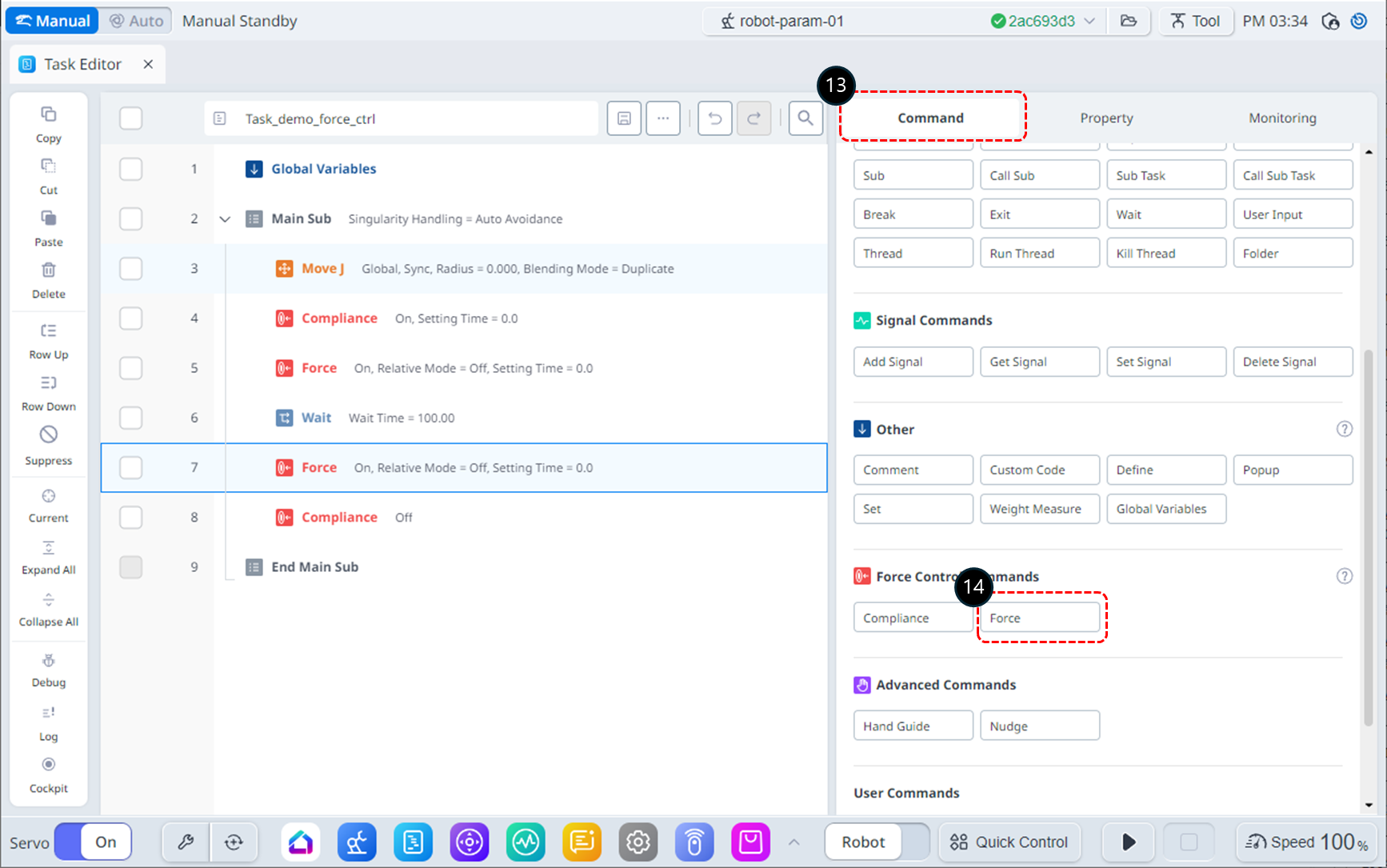
Wybrać kartę Command (polecenie).
-
Dodaj polecenie siły do 5 i 7 linii. Polecenia te zostaną użyte do aktywacji i dezaktywacji funkcji Force Control.
-
Wybierz polecenie Wymuś w 5. Wierszu.
-
Przejdź do karty Właściwości.
-
Ustaw tryb w następujący sposób: Tryb Wł. Aktywuje kontrolę siły.
-
Tryb : Wł
-
-
Ustawić żądaną siłę w następujący sposób.
-
X : 0 N (domyślnie)
-
Y : 0 N (domyślnie)
-
Z : -10 N.
-
RX, Ry, Rz: 0 Nm/rad (domyślnie)
-
-
W polu Kierunek docelowy sprawdzić tylko oś Z.
-
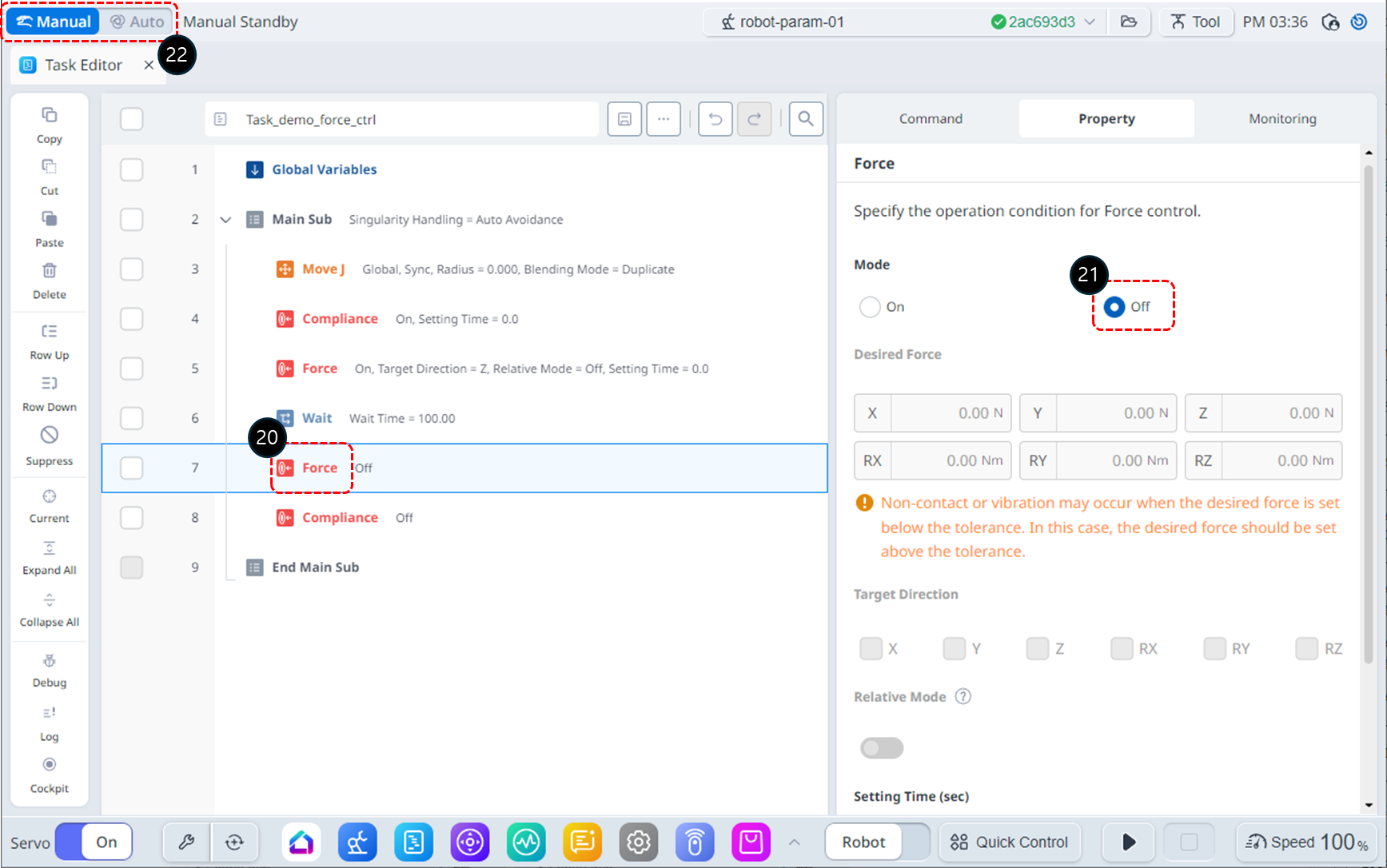
Na liście zadań wybierz polecenie Wymuś w wierszu 7.
-
Ustaw tryb w następujący sposób: Tryb Wył. Wyłącza kontrolę siły.
-
Tryb : Wył
-
-
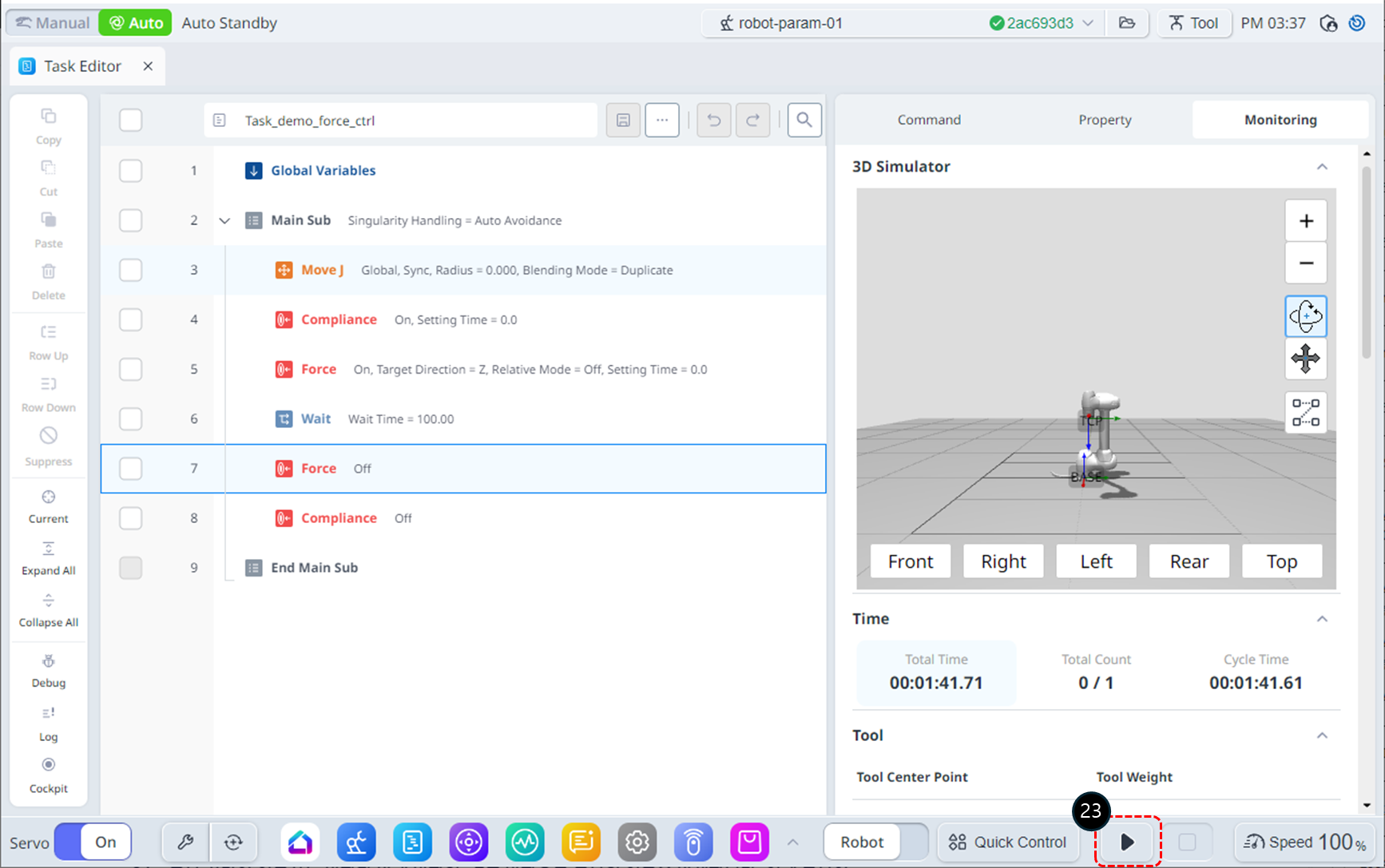
Przełączyć tryb pracy w tryb automatyczny. Karta Właściwości automatycznie przełączy się na kartę Monitorowanie.
Unknown Attachment
-
Kliknij przycisk Uruchom. W stanie oczekiwania robot działa w następujący sposób:
-
Siła -10N jest przyłożona na efektor końcowy robota, powodując, że robot powoli porusza się w kierunku -Z.
-
Zastosować siłę przeciwdziałającą w kierunku +z, przeciwstawiając się ruchowi robota. Gdy siła przyłożona przez robota i przeciwna siła zostaną zrównoważone, robot będzie utrzymywał swoją pozycję, jakby był nieruchomy.
-
Jeśli na robota zostanie przyłożona siła większa niż +10N, będzie on poruszał się w kierunku przyłożonej siły.
-
-
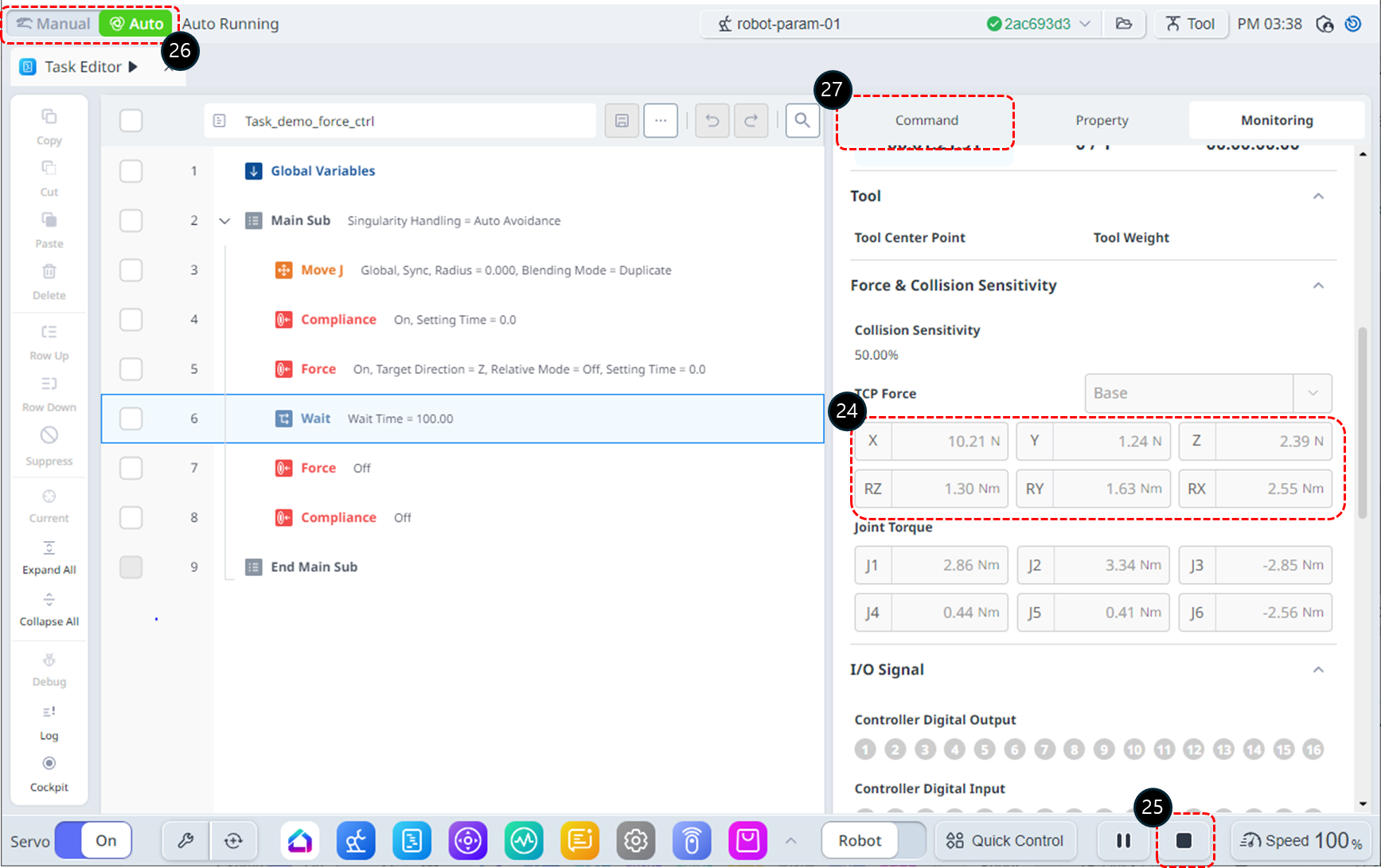
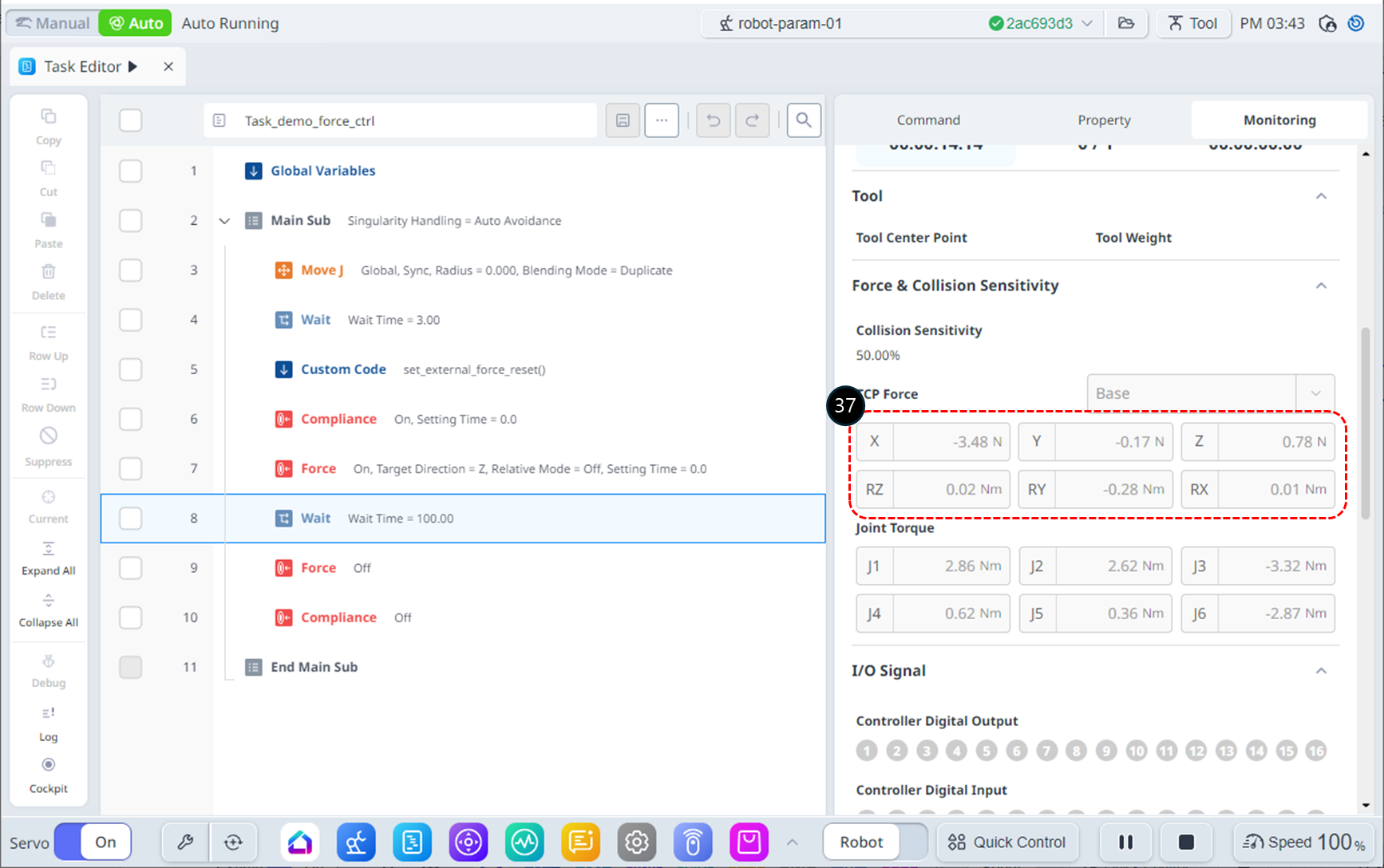
Podczas pracy można monitorować siłę TCP w czasie rzeczywistym w sekcji Siła TCP na karcie Monitorowanie. Jeśli do efektu końcowego robota nie zostanie zastosowana żadna siła, wartości TCP Force powinny być równe zero, ale można zauważyć, że wyświetlane są komponenty błędów. Poniżej znajduje się dodatkowe wyjaśnienie, aby rozwiązać ten problem.
-
Kliknij przycisk Zatrzymaj, aby zakończyć zadanie.
-
Przełączyć tryb pracy na Ręczny dla modyfikacji zadania.
-
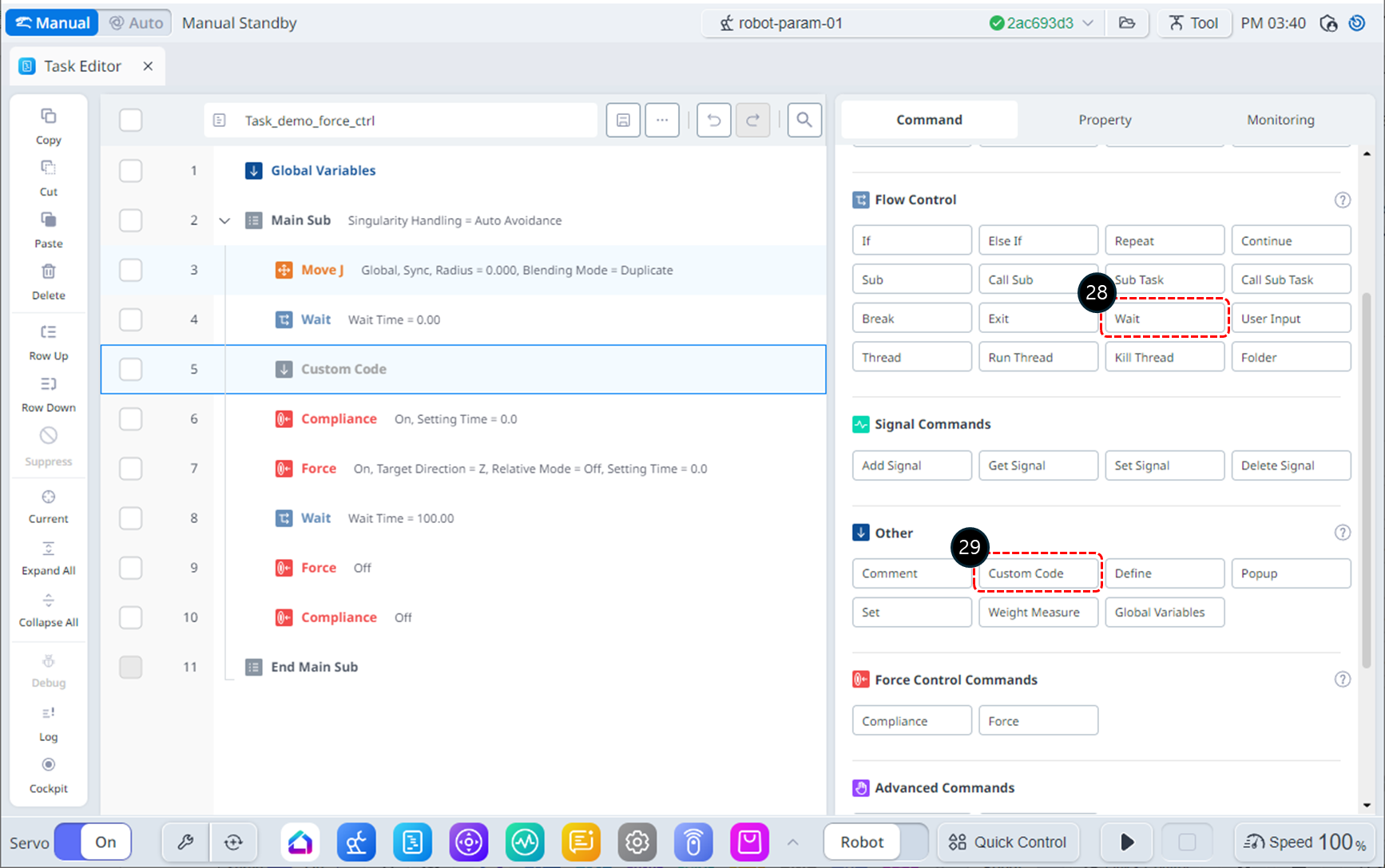
Wybrać kartę Command (polecenie).
-
Dodaj polecenie Wait do wiersza 4 listy zadań.
-
Dodaj polecenie Kod niestandardowy do wiersza 5 listy zadań.
-
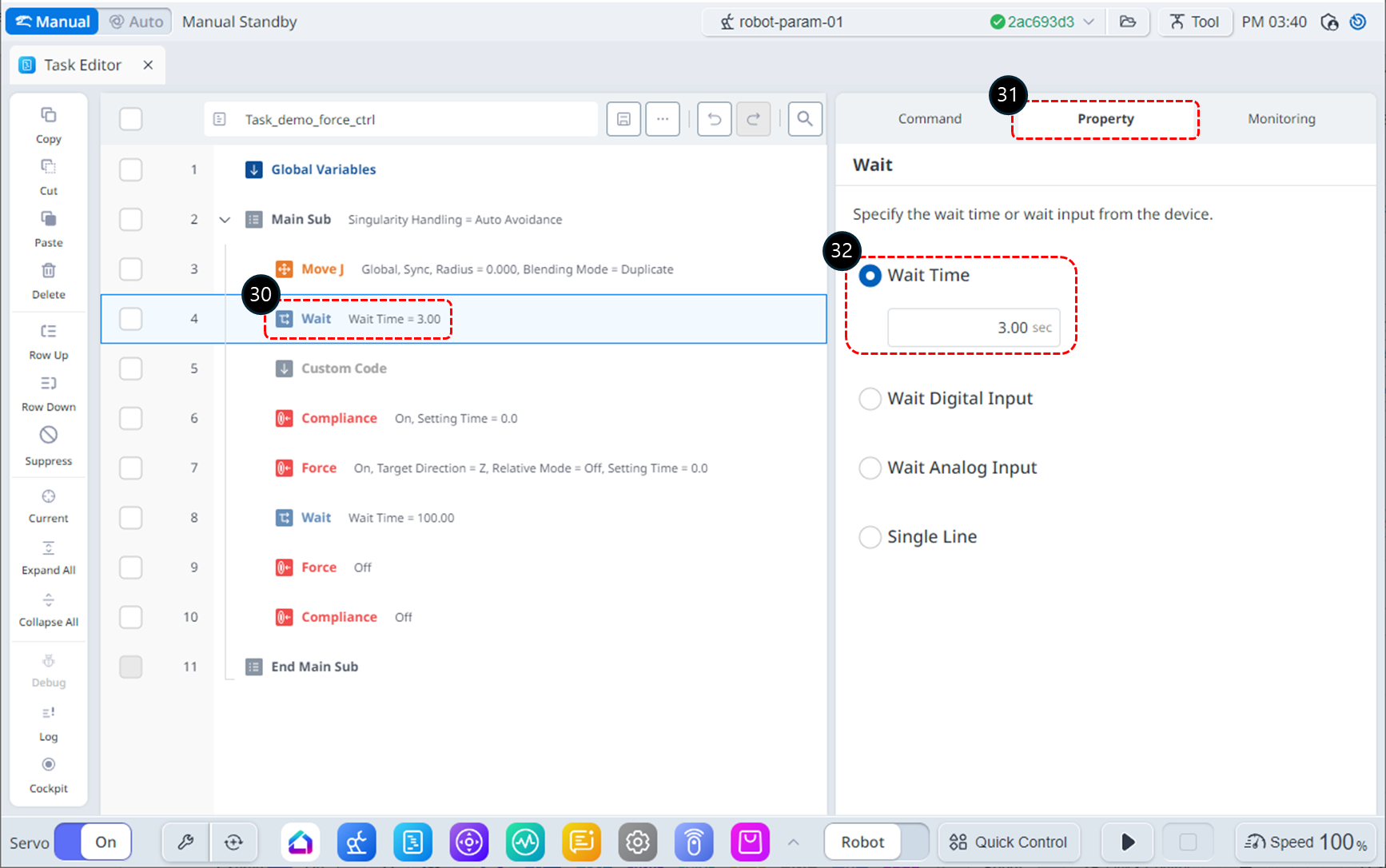
Wybierz polecenie Czekaj w linii 4.
-
Wybrać kartę Własność.
-
Ustaw czas oczekiwania w następujący sposób.
-
Czas oczekiwania: 3 s.
-
-
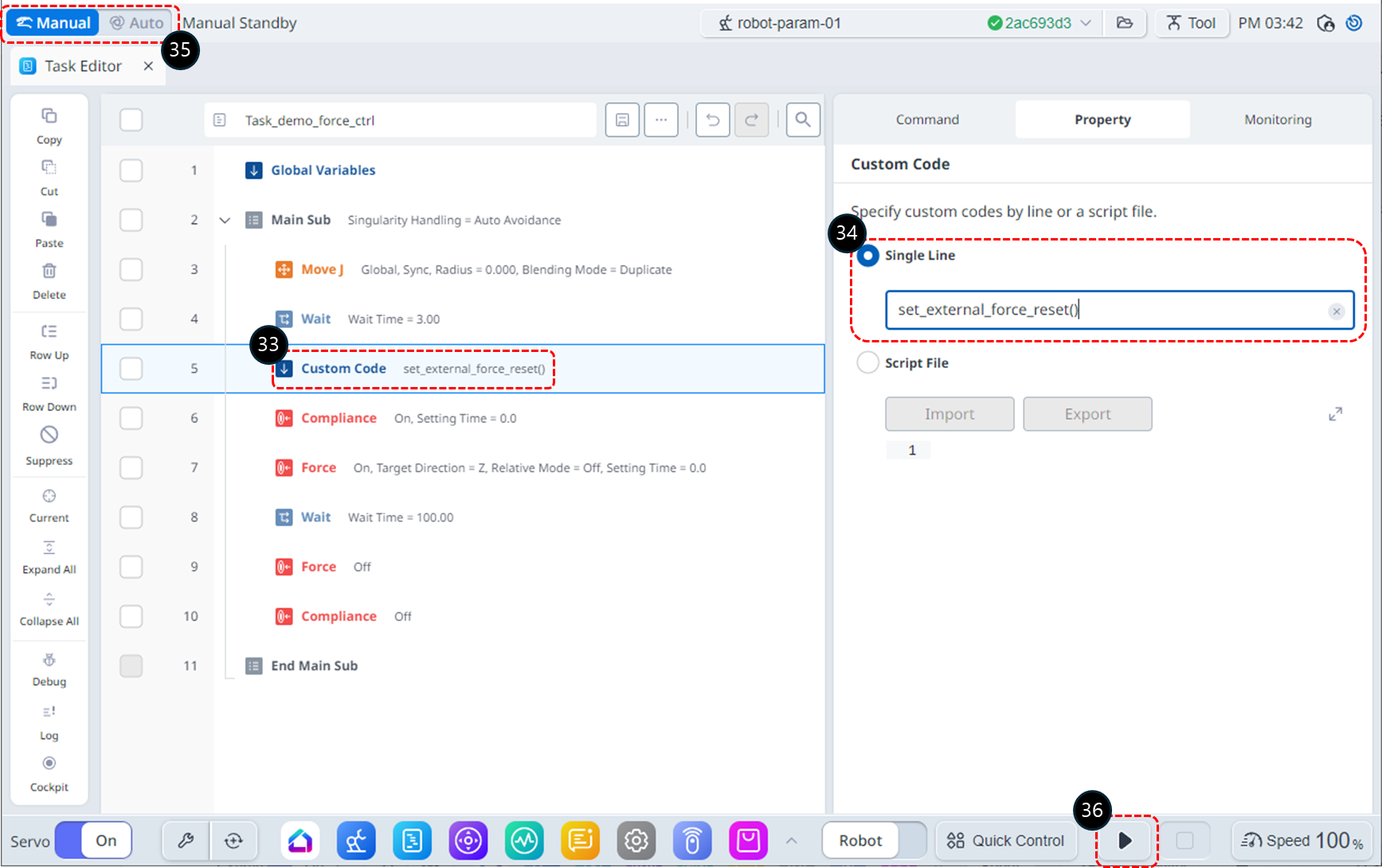
Wybierz polecenie Kod niestandardowy w wierszu 5.
-
Wybierz opcję Pojedyncza linia i dodaj następujące polecenie DRL: To polecenie powoduje wyzerowanie wartości czujnika siły zewnętrznej w celu usunięcia wszelkich błędów.
-
set_externl_force_reset()
-
-
Przełączyć tryb pracy w tryb automatyczny. Karta Właściwości automatycznie przełączy się na kartę Monitorowanie.
-
Kliknij przycisk Uruchom.
-
Na karcie Monitorowanie sprawdź wartości siły TCP. Zauważysz, że błąd został zmniejszony w porównaniu do przed użyciem polecenia set_external_force_reset().