Lista komponentów
|
|
|
Manipulator |
Sterownik (opcjonalny (patrz dodatek) |
|
|
|
Sterowanie manipulatorem |
Kabel zasilania sterownika |
|
|
|
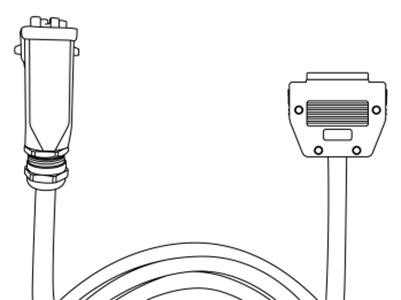
Kabel połączeniowy manipulatora |
Instrukcja obsługi / skrócona instrukcja obsługi |
Nazwa każdej części i funkcji
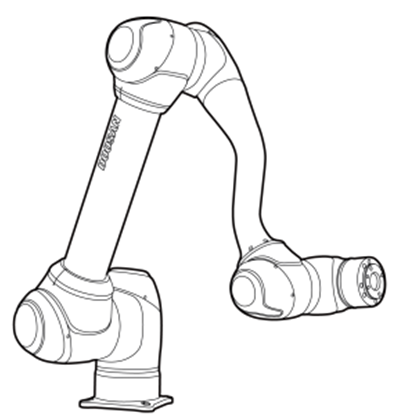
Manipulator
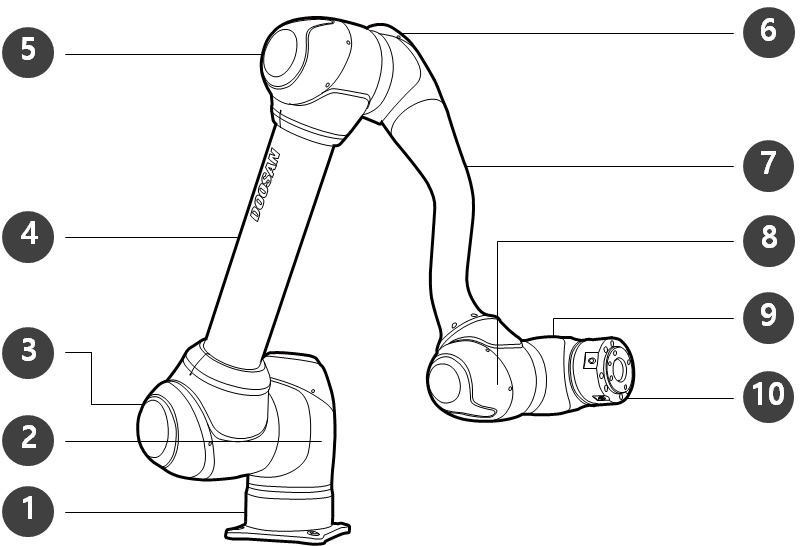
Nazwa każdej części
|
No. |
Nazwa |
No. |
Nazwa |
|---|---|---|---|
|
1 |
Podstawa |
6 |
J4 |
|
2 |
J1 |
7 |
Cięgło 2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Cięgło 1 |
9 |
J6 |
|
5 |
J3 |
10 |
Kołnierz narzędzia |
ㅤ
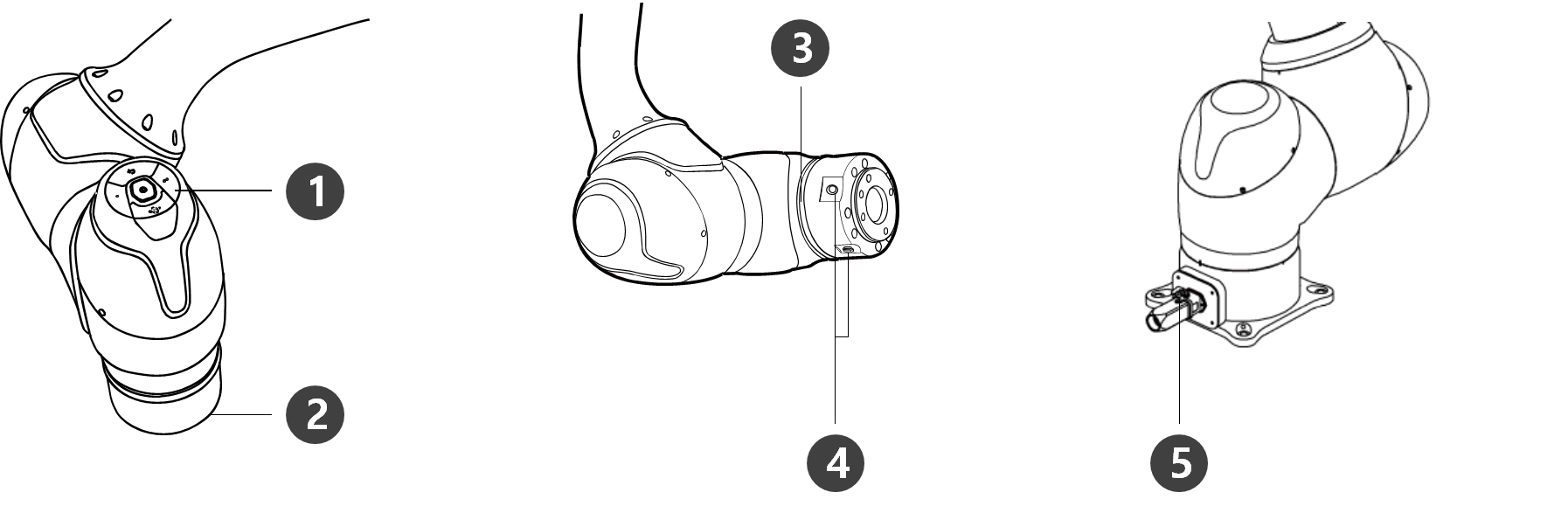
Najważniejsze funkcje
|
No. |
Elementy |
Opis |
|---|---|---|
|
1 |
Kokpit |
[Opcjonalne] Przyciski obsługi do bezpośredniego nauczania i obsługi |
|
2 |
Kołnierz narzędzia |
Miejsce montażu narzędzi. |
|
3 |
3 |
Wyświetla stan robota z różnymi kolorami. Aby uzyskać więcej informacji na temat stanu robota, patrz Status i Kolor kołnierza LED dla każdego trybu. Wersja: Seria H. Seria H jest dostarczana z dodatkową diodą LED na jednej osi, wskazującą ten sam stan i kolor. |
|
4 |
WE/wy kołnierza |
Port we/wy do sterowania narzędziami.
|
|
5 |
Złącze |
Służy do zasilania i komunikacji robota. |
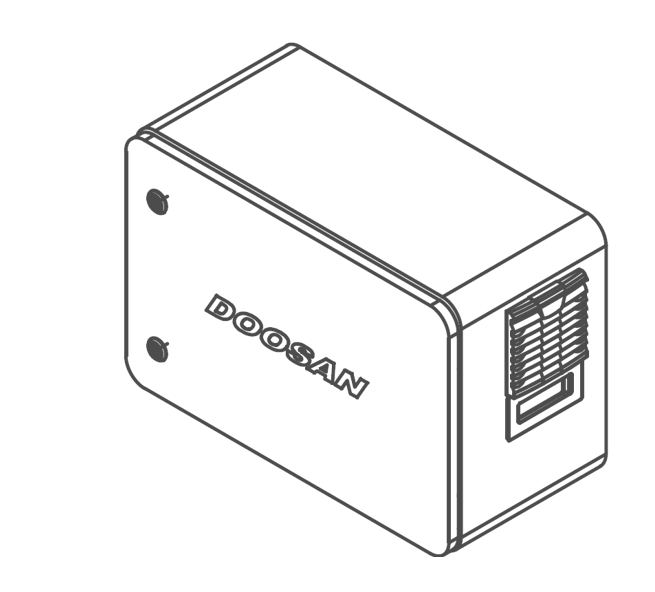
Sterownik
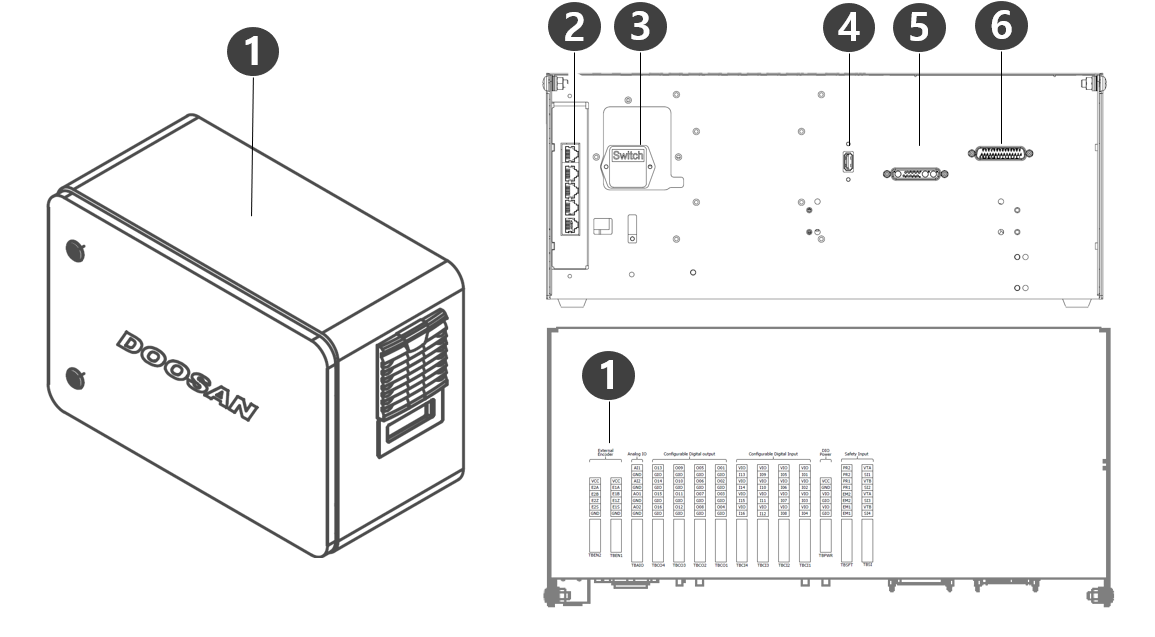
|
No. |
Elementy |
Opis |
|---|---|---|
|
1 |
Złącze we/wy (wewnętrzne) |
Może być połączony ze sterownikami innych robotów lub urządzeniami peryferyjnymi. |
|
2 |
Terminal połączenia sieciowego |
Służy do łączenia się z terminalem połączenia sieciowego wewnątrz kontrolera w celu korzystania z laptopów, urządzeń TCP/IP i urządzeń Modbus. |
|
3 |
Złącze/przełącznik zasilania |
Służy do podłączania zasilania sieciowego kontrolera w celu jego włączenia lub wyłączenia. Więcej informacji można znaleźć w części Włączanie/wyłączanie systemu. |
|
4 |
Złącze USB |
Służy do przechowywania dzienników utworzonych podczas pracy robota w pamięci USB lub eksportowania i importowania zadań. |
|
5 |
Złącze kabla manipulatora |
Służy do podłączania kabla manipulatora do kontrolera. |
|
6 |
Terminal do podłączenia kabla manipulatora |
Służy do podłączania kabla manipulatora nauczania do sterownika. |
Uwaga
W przypadku wybrania opcjonalnego kontrolera przed użyciem należy zapoznać się z instrukcją obsługi w dodatku, aby nawiązać połączenie.
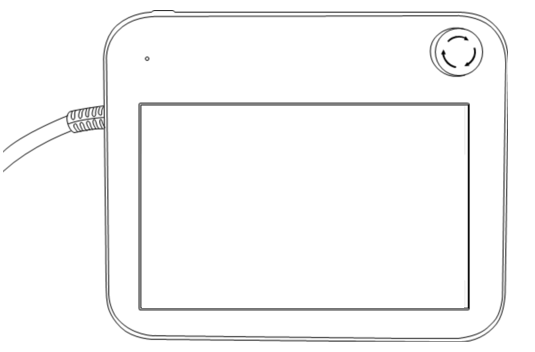
Sterowanie manipulatorem
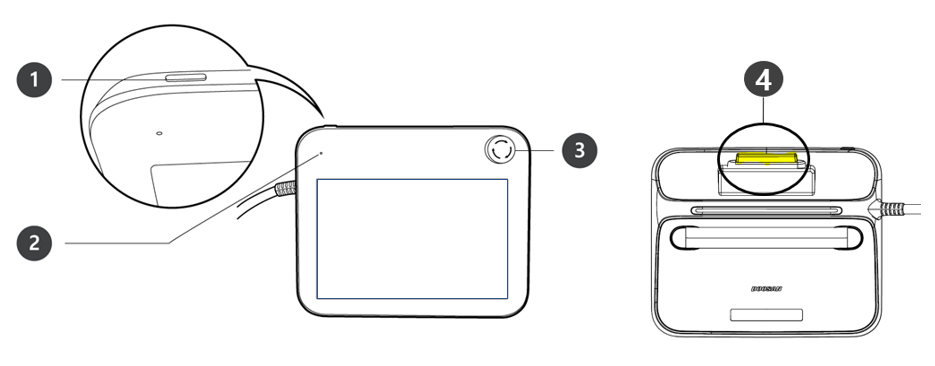
|
No. |
Elementy |
Opis |
|---|---|---|
|
1 |
Przycisk zasilania |
|
|
2 |
Dioda LED zasilania |
|
|
3 |
Przycisk zatrzymania awaryjnego |
|
|
4 |
Przycisk prowadzenia ręcznego (przełącznik włączania położenia 3PE 3) |
|
Uwaga
-
Jeśli manipulator Teach wymaga zabezpieczenia i zamontowania podczas pracy, miękka osłona dostarczona przez nas sprawia, że jest bezpieczniejszy i łatwiejszy w użyciu.
-
Nowa funkcja TP (TP-02): Podwójna funkcja Hand Guide
-
Nie można używać istniejącego TP (TP-01) w zintegrowanym sterowniku. (Zmiana mapy styków ze względu na przełącznik 3PE)
-
Nowy TP (TP-02) może być używany w istniejącym sterowniku, ale dioda LED zmienia się na jeden kolor (czerwony) i jest wyświetlana, a dodatkowe funkcje nie mogą być używane.
-
Konfiguracja systemu
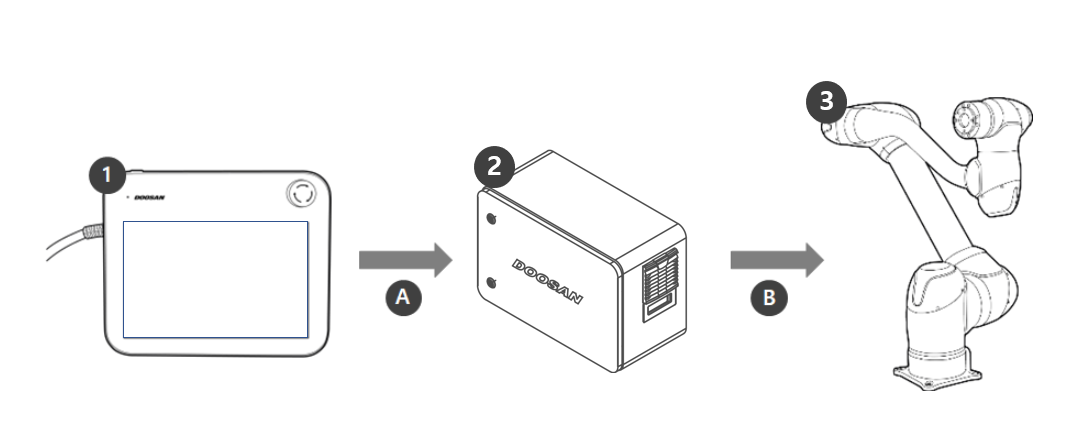
|
No. |
Nazwa |
Opis |
|---|---|---|
|
1 |
Sterowanie manipulatorem |
To urządzenie zarządza całym systemem i jest w stanie nauczyć robota konkretnych pozycji lub dokonać ustawień związanych z manipulatorami i kontrolerami. |
|
2 |
Sterownik |
Steruje ruchem robota w zależności od pozycji lub ruchu ustawionego przez manipulator nauczania. Posiada różne porty i/o, które umożliwiają podłączenie i korzystanie z różnych urządzeń i urządzeń. |
|
3 |
Manipulator |
Jest to przemysłowy robot współpracujący, który może wykonywać zadania transportowe lub montażowe za pomocą różnych narzędzi. |
|
A. |
Sterowanie/monitorowanie |
|
|
B. |
Zasilanie/sieć |
|