Sub jest skrótem od podprocedury. Podprocedura odnosi się do procesu, który minimalizuje liczbę kroków w programie poprzez wywołanie niezbędnych części, gdy występują dwie lub więcej zduplikowanych części.
-
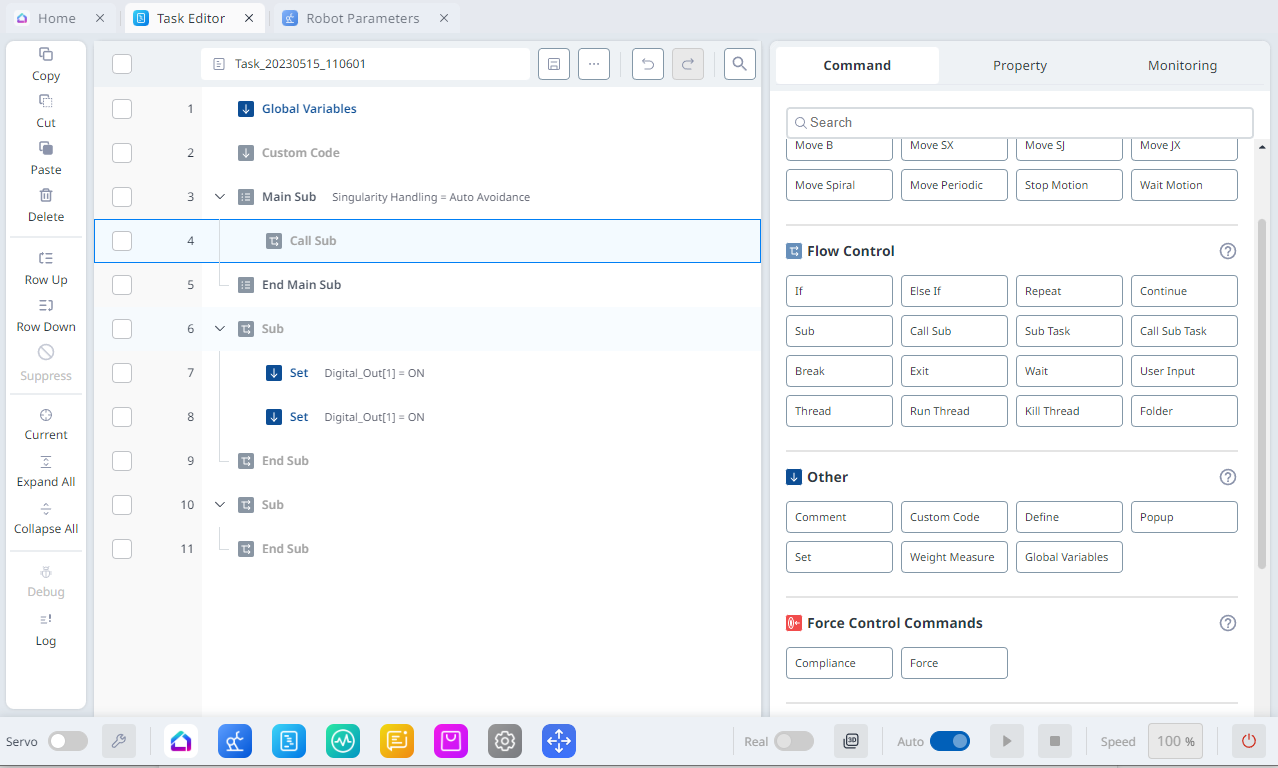
Roboty Doosan Robotics dostarczają polecenie CallSub, aby wywołać polecenia Sub i odpowiedni akapit.
-
Polecenie Sub działa zgodnie z definicją w Pythonie.
Uwaga
-
Podpunkt musi być dodany w MainSub, na początku akapitu głównego i EndMainSub, na końcu akapitu głównego.
-
Oprócz powtarzania, polecenie Sub jest również używane do uproszczenia akapitu głównego. Użycie polecenia podrzędnego pozwoli intuicyjnie określić, jakie zadanie w danym momencie wykonuje się w głównym akapicie.
-
Użycie polecenia podrzędnego umożliwia testowanie jednostek podakapitu.
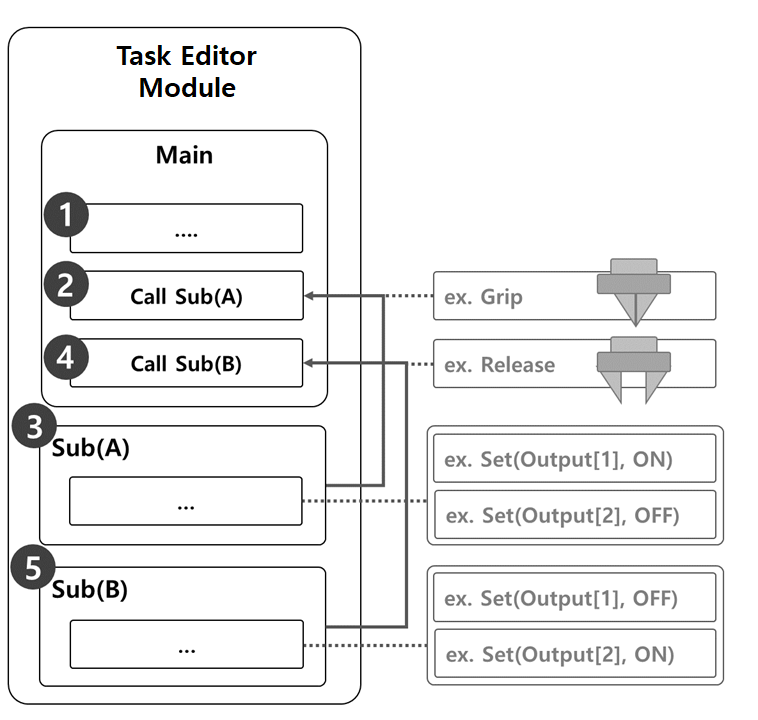
Próbka, w której polecenie Sub jest używane do wykonywania ruchów chwytaka robota i zwalniania, składa się z następujących elementów.
-
Linie akapitu głównego wykonują program zadania w kolejności sekwencyjnej, zaczynając od pierwszej linii.
-
Przejdź do Sub(A) wywoływanego przez Call Sub.
-
Próbka
-
Program: Zadzwoń do podprogramu Grip.
-
Robot: Brak ruchu
-
-
-
Podpunkt (A) jest wykonywany. Wszystkie linie akapitu są wykonywane w kolejności sekwencyjnej, powraca do akapitu głównego i wykonuje następny wiersz.
-
Próbka
-
Program: Wykonaj linie podrzędne Grip w kolejności sekwencyjnej. Użyj polecenia Ustaw, aby ustawić wyjście [] jako WŁ. I Wyjście [2] jako WYŁ.
-
Robot: Chwytak automatyczny wykonuje ruch chwytu.
-
-
-
Przejdź do Sub(B) wywoływanego przez Call Sub.
-
Próbka
-
Program: Wezwij podprocedurę zwalniania.
-
Robot: Brak ruchu
-
-
-
Podpunkt (B) jest wykonywany. Wszystkie linie akapitu są wykonywane w kolejności sekwencyjnej, powraca do akapitu głównego i wykonuje następny wiersz.
-
Próbka
-
Program: Wykonaj linie podrzędne Grip w kolejności sekwencyjnej. Użyj polecenia Ustaw, aby ustawić wyjście [] jako wyłączone, a wyjście [2] jako WŁĄCZONE.
-
Robot: Chwytak automatyczny wykonuje ruch zwalniający.
-
-
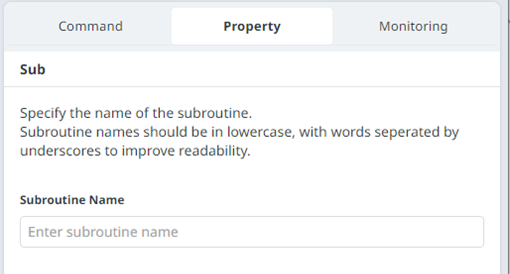
Dodaj polecenie podrzędne
-
W module Edytor zadań, w sekcji Kontrola przepływu w menu polecenie po prawej stronie, dodać polecenie podrzędne.
-
Wprowadź nazwę podprogramu.
Dodaj polecenie CallSub
-
W module Edytor zadań, w sekcji Kontrola przepływu w menu polecenie po prawej stronie, dodaj polecenie podrzędne wywołania.
-
Wybierz nazwę podprogramu zarejestrowaną za pomocą polecenia Sub.
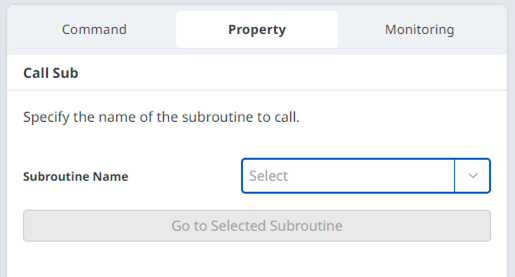
Uwaga
-
Jeśli liczba linii wzrośnie w programie zadań, znalezienie podprogramów może być trudne. W takim przypadku dotknij opcji Przejdź do wybranej podprocedury w poleceniu Właściwości funkcji CallSub, aby przenieść fokus do odpowiedniego wiersza polecenia podrzędnego.