Wprowadzenie do produktu (CS-12P)
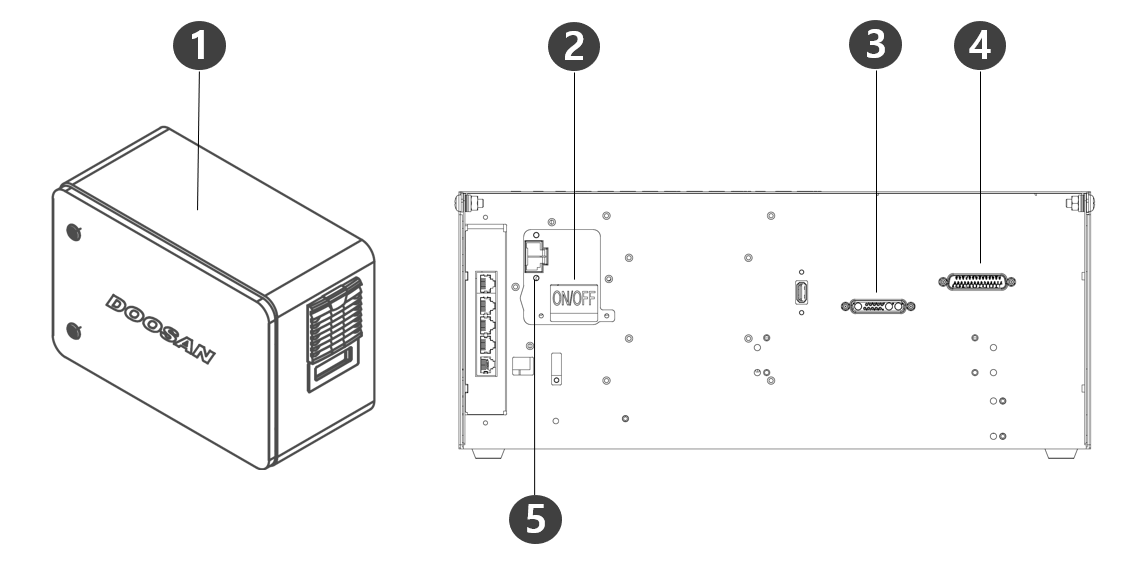
Nazwa każdej części i funkcji
|
No. |
Elementy |
Opis |
|
1 |
Złącze we/wy (wewnętrzne) |
Może być połączony ze sterownikami innych robotów lub urządzeniami peryferyjnymi. |
|
2 |
Przełącznik zasilania |
Służy do WŁĄCZANIA/wyłączania głównego zasilania sterownika . |
|
3 |
Terminal do podłączenia kabla manipulatora |
Służy do podłączania kabla manipulatora nauczania do sterownika. |
|
4 |
zacisk przyłączeniowy przewodu robota |
Służy do podłączenia kabla robota do sterownika. |
|
5 |
Złącze zasilania |
Służy do podłączenia zasilania sterownika. |
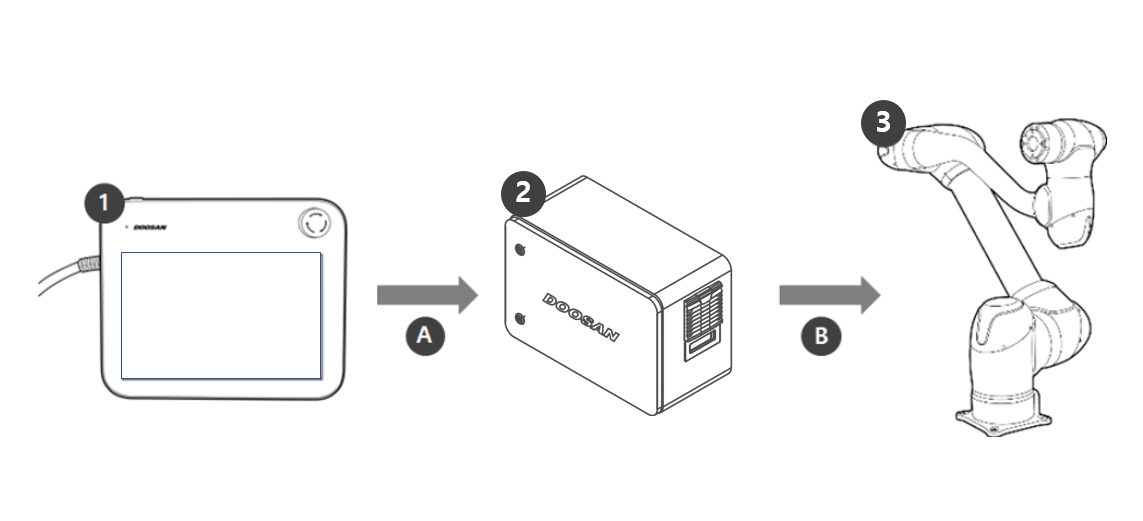
Konfiguracja systemu
|
No. |
Nazwa |
Opis |
|---|---|---|
|
1 |
Sterowanie manipulatorem |
To urządzenie zarządza całym systemem i jest w stanie nauczyć robota konkretnych pozycji lub dokonać ustawień związanych z manipulatorami i kontrolerami. |
|
2 |
Sterownik |
Steruje ruchem robota w zależności od pozycji lub ruchu ustawionego przez manipulator nauczania. Posiada różne porty i/o, które umożliwiają podłączenie i korzystanie z różnych urządzeń i urządzeń. |
|
3 |
Manipulator |
Jest to przemysłowy robot współpracujący, który może wykonywać zadania transportowe lub montażowe za pomocą różnych narzędzi. |
|
A. |
Sterowanie/monitorowanie |
|
|
B. |
Zasilanie/sieć |
|
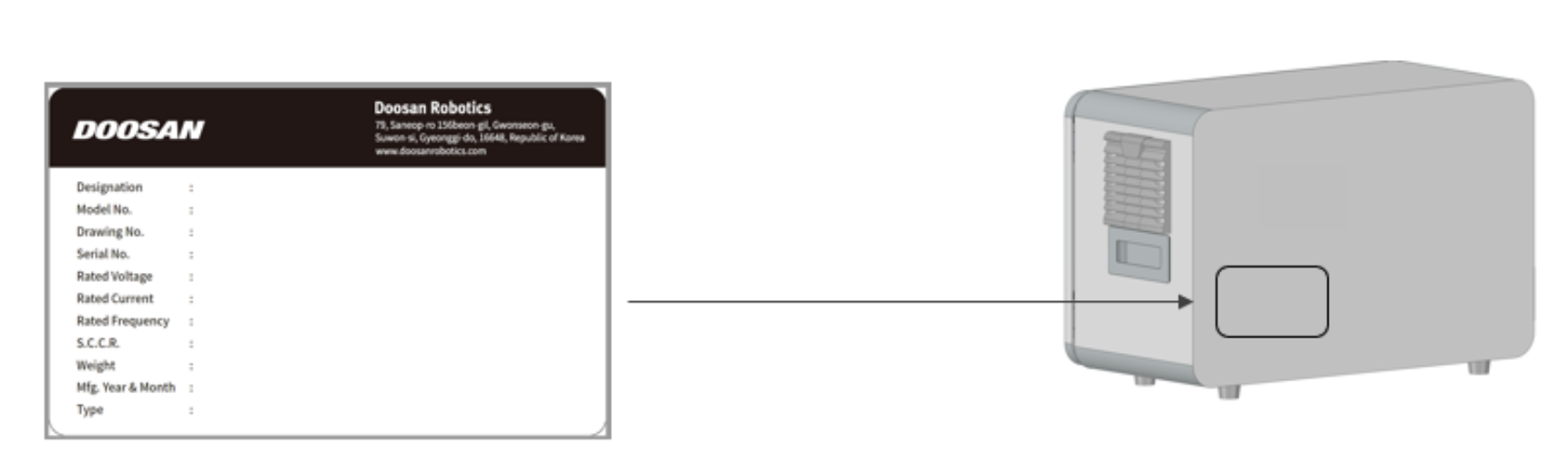
Tabliczka znamionowa i etykieta
Instalacja (CS-12P)
Przestrogi podczas instalacji
Uwaga
-
Przed zainstalowaniem kontrolera należy zabezpieczyć wystarczającą ilość miejsca. Jeśli nie ma wystarczającej ilości miejsca, kontroler może być uszkodzony lub może zabraknąć kabla manipulatora lub kabla manipulatora manipulatora manipulatora lub sterownika.
-
Sprawdź zasilanie wejściowe podczas podłączania zasilania do urządzenia. Jeśli podłączony zasilacz wejściowy różni się od znamionowego źródła zasilania (22-60VDC), wiele urządzeń nie działa prawidłowo lub sterownik może być uszkodzony.
Środowisko instalacji
Podczas instalowania kontrolera należy wziąć pod uwagę następujące kwestie.
-
Przed zainstalowaniem kontrolera należy zabezpieczyć wystarczającą ilość miejsca.
-
Sterownik musi być zamocowany.
-
Upewnić się, że żaden element nie jest zamocowany w pojeździe przenośnym.
Instalacja sprzętu
Przed uruchomieniem manipulatora należy zainstalować robota, sterownik i manipulator dydaktyczny, najważniejsze elementy systemu i dostarczyć im zasilanie. Instrukcja montażu każdego elementu jest następująca:
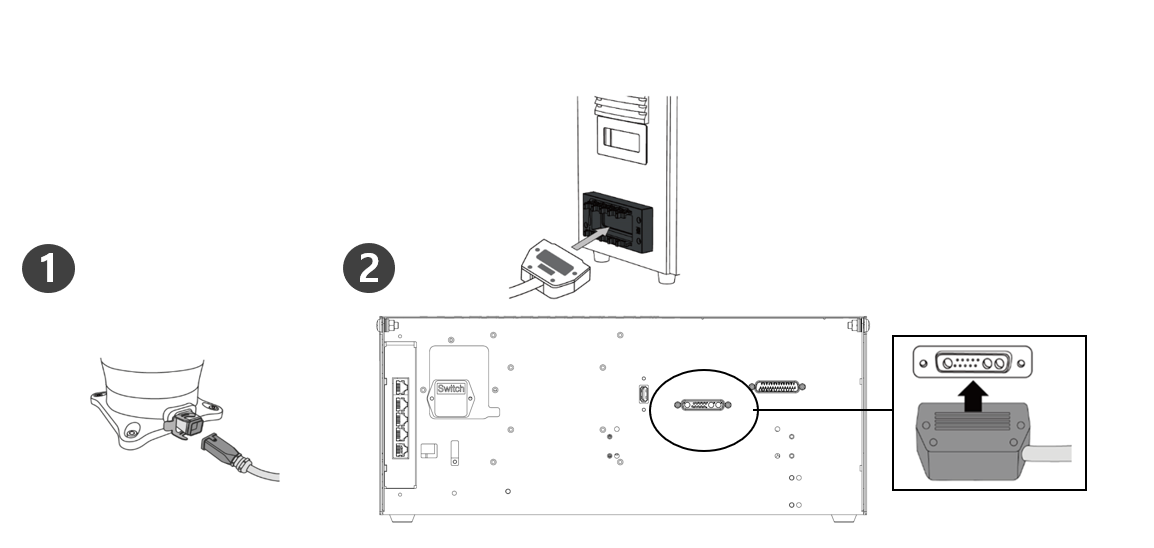
Podłączanie manipulatora do sterownika
|
|
Opis |
|---|---|
|
1 |
Podłączyć kabel manipulatora do sterownika i założyć pierścień zabezpieczający
|
|
2 |
Podłączanie przeciwległego końca kabla połączeniowego manipulatora do sterownika
|
Uwaga
-
Nie odłączaj kabla manipulatora, gdy robot jest włączony. Może to spowodować nieprawidłowe działanie robota.
-
Nie wolno dokonywać żadnych modyfikacji ani przedłużeń kabla manipulatora.
-
Montując sterownik na podłodze, zabezpieczyć co najmniej 50 mm prześwitu z każdej strony, aby zapewnić odpowiednią wentylację.
-
Przed włączeniem sterownika należy upewnić się, że złącza są prawidłowo zablokowane.
Uwaga
-
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
-
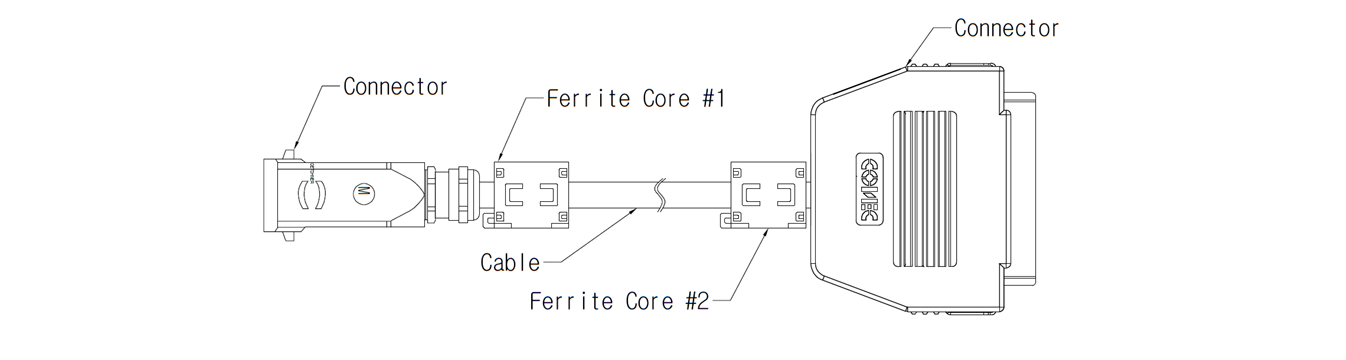
Jeśli na sterownik wpływa hałas generowany przez fale elektromagnetyczne, konieczne jest zainstalowanie rdzenia ferrytowego w celu zapewnienia normalnego działania. Lokalizacja instalacji jest następująca:
Podłącz kontroler, aby zaprogramować manipulator
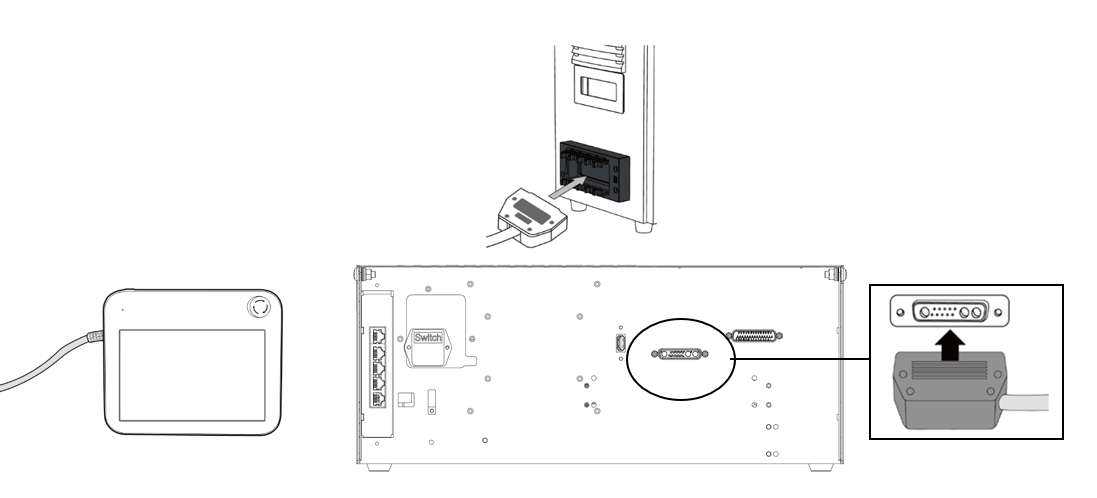
Podłącz kabel manipulatora TEACH do odpowiednich złączy kontrolera, aż do kliknięcia i upewnij się, że kabel jest mocno podłączony.
Uwaga
-
Podczas podłączania kabla przed podłączeniem sprawdzić kształt połączenia, aby sworzeń nie zginał się.
-
Jeśli manipulator jest używany przez zawieszenie na pojeździe mobilnym lub na sterowniku, należy uważać, aby nie potknąć się o kable łączące.
-
Należy uważać, aby sterownik, sterownik i kabel nie zetknęły się z wodą.
-
Nie należy instalować kontrolera i uczyć manipulatora w warunkach zapylenia lub mokrej pracy.
-
Kontrolery i inteligentny manipulator nigdy nie mogą być narażone na działanie kurzu o temperaturze powyżej IP20 stopni. Należy zachować szczególną ostrożność w środowiskach z przewodzącym kurzem.
Uwaga
-
Podczas konfigurowania systemu zaleca się zainstalowanie reduktora szumów, aby zapobiec zakłóceniom i zakłóceniom działania systemu.
-
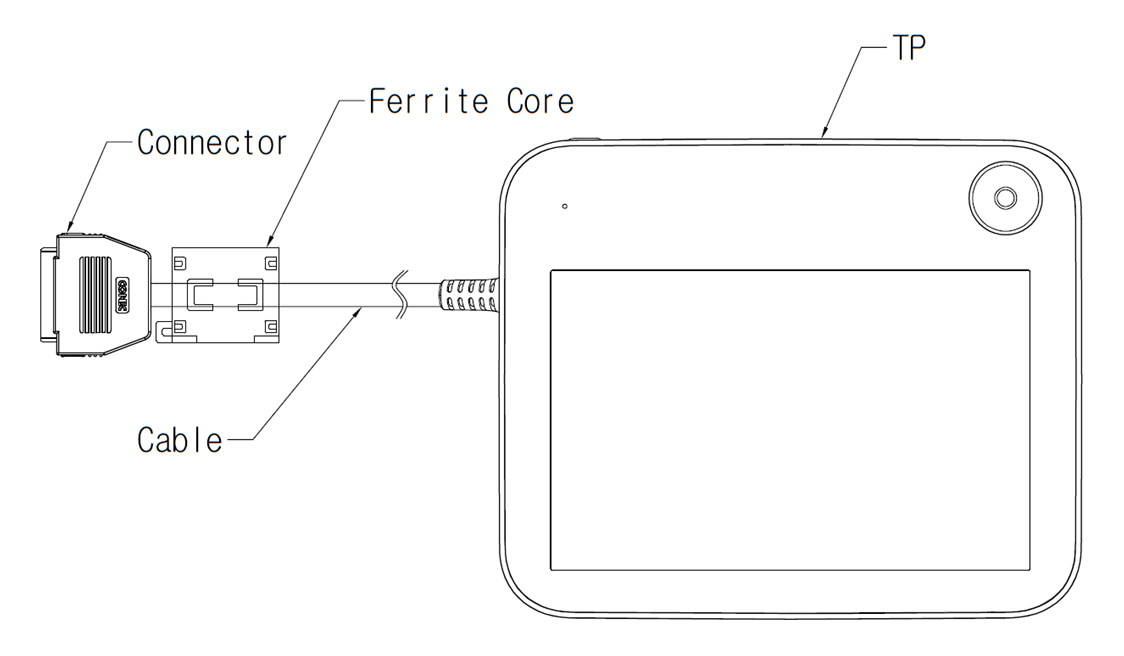
Jeśli manipulator nauczania jest pod wpływem szumu generowanego przez fale elektromagnetyczne, konieczne jest zainstalowanie rdzenia ferrytowego w celu zapewnienia normalnego działania. Lokalizacja instalacji jest następująca:
Umieszczanie kabla manipulatora i kabla manipulatora
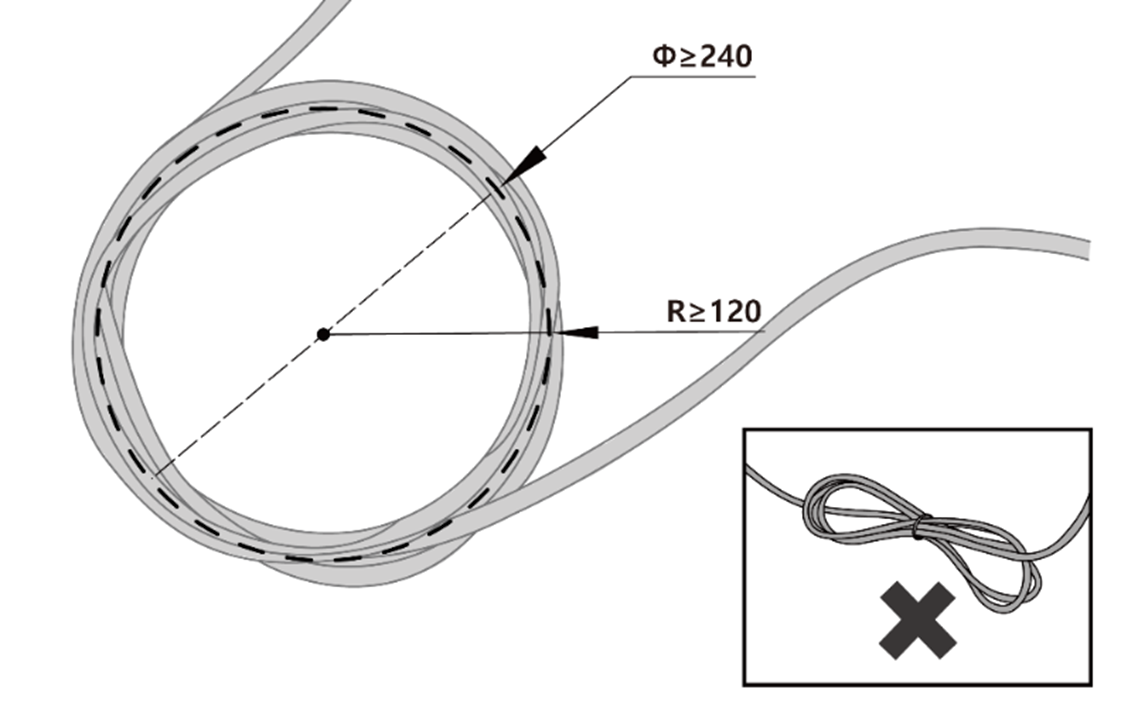
Upewnij się, że promień krzywizny manipulatora i kabla do nauki manipulatora jest większy niż minimalny promień krzywizny (120 mm).
Uwaga
-
Upewnij się, że promień krzywizny między kablem manipulatora a złączem manipulatora uczenia jest większy niż minimalny promień krzywizny (120 mm).
-
Jeśli promień krzywizny jest mniejszy niż minimalny promień krzywizny (120 mm), może dojść do odłączenia kabla lub uszkodzenia produktu.
-
W środowiskach, w których może wystąpić hałas elektromagnetyczny, należy odpowiednio zainstalować kabel, aby zapobiec nieprawidłowym działaniom.
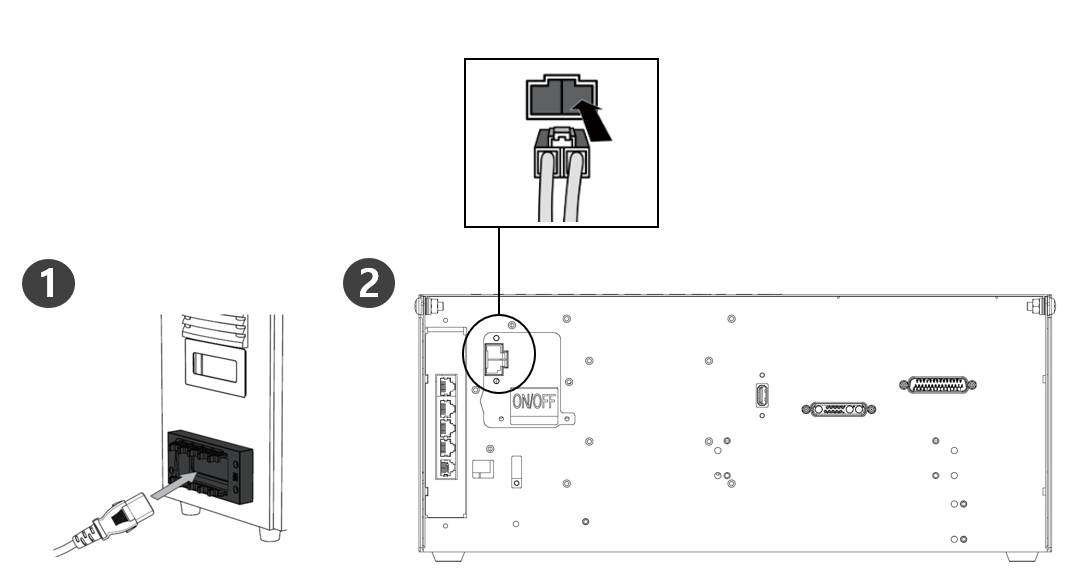
Podłączanie zasilania do sterownika
Podłącz kabel zasilający do odpowiednich złączy kontrolera, aż do kliknięcia i upewnij się, że kabel jest mocno podłączony.
Ostrzeżenie
-
Po podłączeniu kabli zasilania (połączenia uziemienia elektrycznego) należy upewnić się, że robot jest prawidłowo uziemiony. Ustalić wspólną masę dla wszystkich urządzeń w układzie, używając nieużywanych śrub związanych z symbolem masy wewnątrz sterownika. Przewód uziemiający musi spełniać maksymalną znamionową moc znamionową systemu.
-
Zabezpieczyć moc wejściową sterownika za pomocą takich urządzeń, jak wyłącznik automatyczny.
-
Nie wolno modyfikować ani przedłużać kabla robota. Może to spowodować pożar lub awarię kontrolera.
-
Przed dostarczeniem zasilania do sterownika należy upewnić się, że wszystkie kable są prawidłowo podłączone. Zawsze używaj oryginalnego kabla dołączonego do opakowania produktu.
-
Uważać, aby nie podłączyć nieprawidłowo biegunowości napięcia wejściowego.
Uwaga
-
Podczas konfigurowania systemu zaleca się zainstalowanie przełącznika zasilania umożliwiającego jednoczesne wyłączenie wszystkich urządzeń.
-
W przypadku korzystania ze sterownika DC ruch robota może być ograniczony w zależności od obciążenia i ruchu.
-
Jeśli napięcie wejściowe jest mniejsze niż 48V, ruch robota może być ograniczony w zależności od obciążenia i ruchu.
-
Zasilacz musi spełniać minimalne wymagania, takie jak wyłączniki uziemiające i automatyczne. Parametry elektryczne są następujące:
|
Parametr |
Dane techniczne |
|
Napięcie wejściowe |
22 – 60 VDC |
|
Znamionowy prąd wejściowy |
30 A. |