Menu
|
|
Elementy |
Opis |
|---|---|---|
|
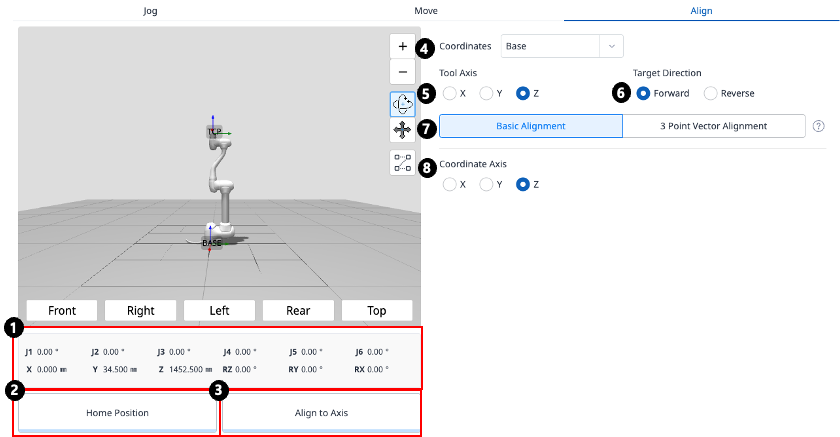
1 |
Pozycja robota |
Wyświetla postawę stawów i postawę zadania bieżącego robota.
|
|
2 |
Przycisk pozycji wyjściowej |
Po kliknięciu przesuwa robota do pozycji wyjściowej. |
|
3 |
Przycisk Wyrównaj |
Wyrównuje robota po kliknięciu. |
|
4 |
Wybrać Układ współrzędnych odniesienia |
Wybrać układ współrzędnych odniesienia dla pozycjonowania. |
|
5 |
Oś narzędzia |
Wybierz oś TCP do wyrównania. |
|
6 |
Kierunek docelowy |
Wybierz kierunek, z którym ma być wyrównany protokół TCP. |
|
7 |
Metoda wyrównywania |
Wybierz metodę wyrównywania.
|
|
8 |
Oś współrzędnych |
Wybierz oś układu współrzędnych odniesienia do wyrównania. |
|
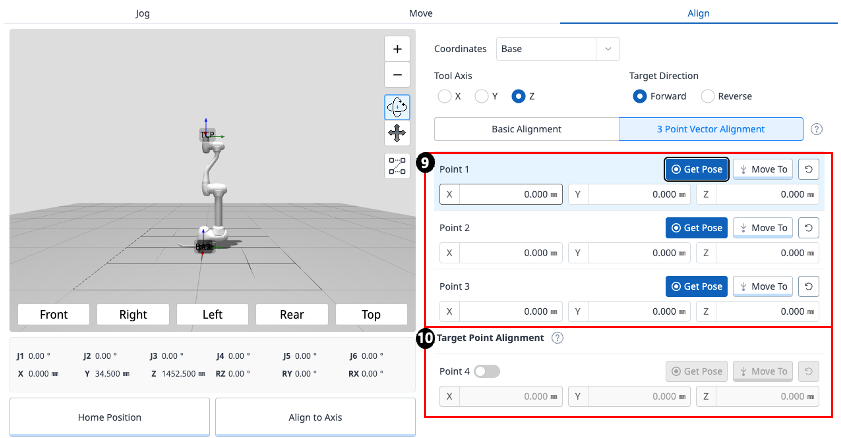
9 |
Wybrać Punkty na płaszczyźnie |
Wybrać trzy punkty definiujące płaszczyznę. 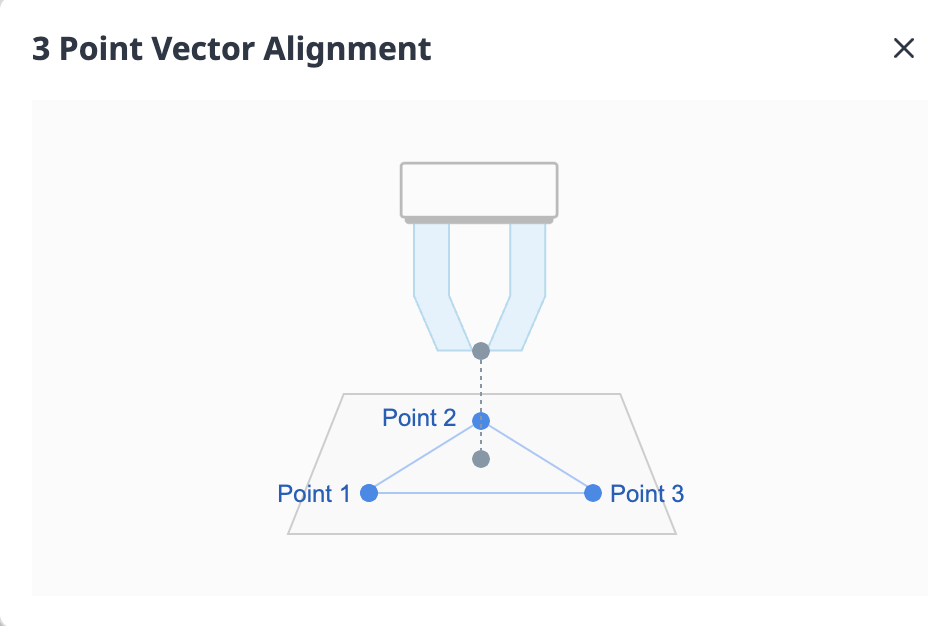
|
|
10 |
Wyrównanie punktu docelowego |
Wybierz punkt, w którym chcesz ustawić TCP.
|