Naprawianie robota
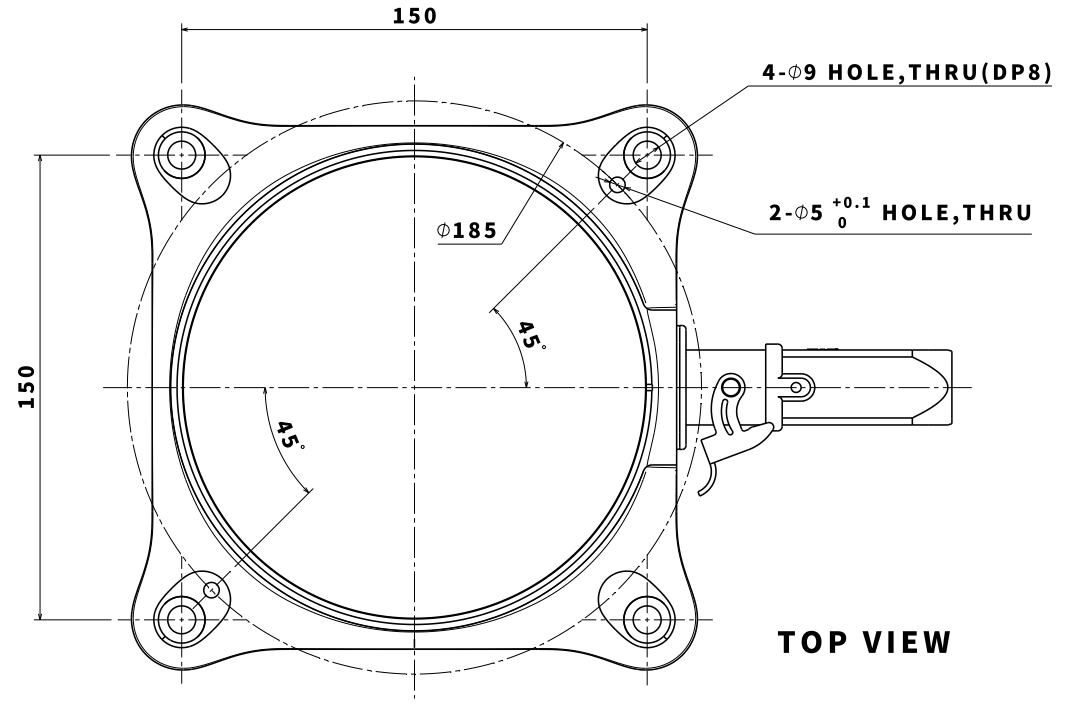
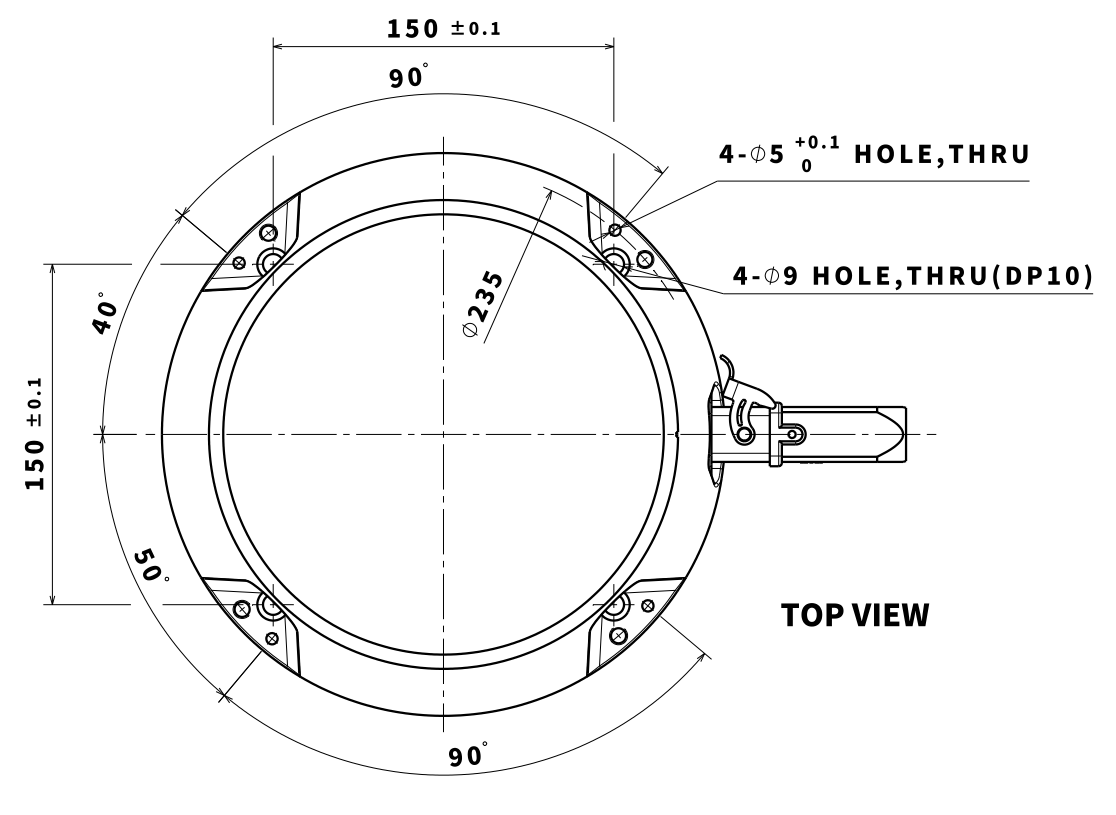
Użyć śrub M8 w czterech otworach 9.0 mm w podstawie manipulatora, aby zamocować robota.
-
W celu dokręcenia śrub zaleca się dokręcenie ich momentem 20 Nm. Użyć podkładek (sprężynowych), aby zapobiec poluzowaniu przez wibracje.
-
Za pomocą dwóch Φ5 umieścić sworznie znacznikowe, aby dokładnie zamontować robota w stałym miejscu.
Zastosowano rysunek podstawy manipulatora i cztery śruby M8 (seria M). Jednostka [mm]
Zastosowano rysunek podstawy manipulatora i cztery śruby M8 (seria H), Jednostka [mm]
Ostrzeżenie
-
Dokręcić śruby całkowicie, aby zapobiec poluzowaniu podczas pracy manipulatora.
-
Zamontować podstawę manipulatora na solidnej powierzchni, która może wytrzymać obciążenie generowane podczas pracy (10-krotny maksymalny moment obrotowy i pięciokrotny ciężar robota).
-
Robot interpretuje wibracje podstawy manipulatora jako kolizję i włącza wyłącznik awaryjny. Dlatego też w przypadku miejsc instalacji, które automatycznie zmieniają położenie, nie należy montować podstawy robota w miejscu o dużym przyspieszeniu ruchu.
-
Zamontować ramię manipulatora w określonym miejscu przy użyciu odpowiednich metod. Powierzchnia montażowa musi być solidna.
-
Manipulator zostanie uszkodzony, jeśli wejdzie w kontakt z wodą przez dłuższy czas. Nie wolno używać robota w warunkach, w których może on być mokry lub pod wodą.
Umieszczanie kabla
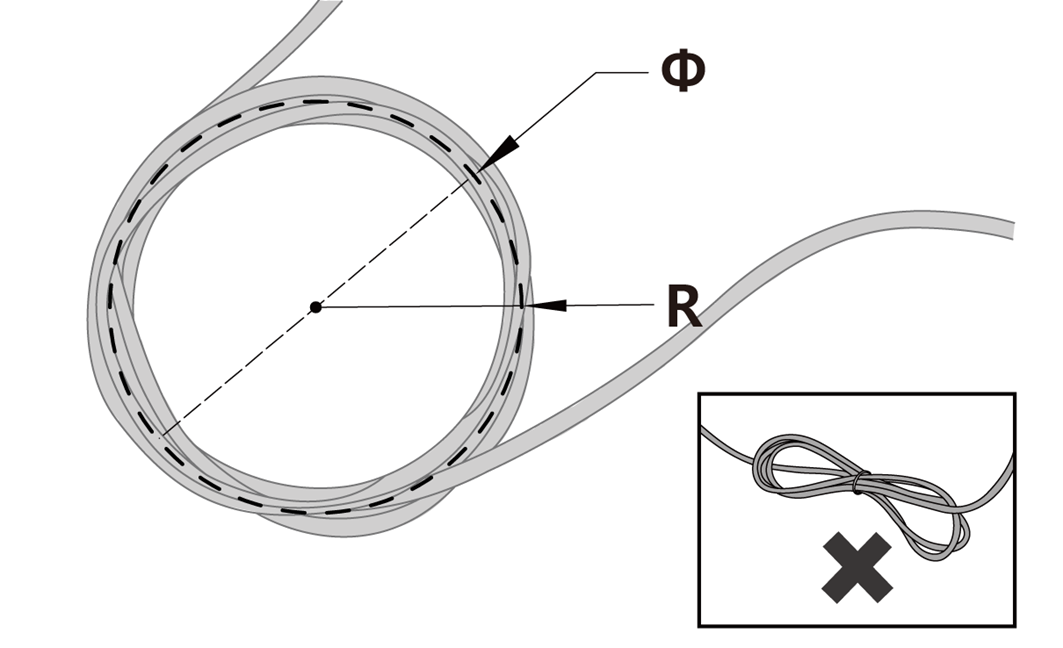
Upewnij się, że kable mają krzywizny większe niż minimalny promień krzywizny. Minimalny promień krzywizny każdego kabla jest następujący:
|
Kabel |
Minimalny promień krzywizny (R) |
|---|---|
|
Naucz kabel manipulatora |
120 mm |
|
Kabel robota |
120 mm |
Uwaga
-
Upewnij się, że promień krzywizny między kablem manipulatora nauczania a złączem manipulatora uczenia jest większy niż minimalny promień krzywizny.
-
Jeśli promień krzywizny jest mniejszy niż minimalny promień krzywizny, może dojść do odłączenia kabla lub uszkodzenia produktu.
-
W środowiskach, w których może wystąpić hałas elektromagnetyczny, należy odpowiednio zainstalować kabel, aby zapobiec nieprawidłowym działaniom.