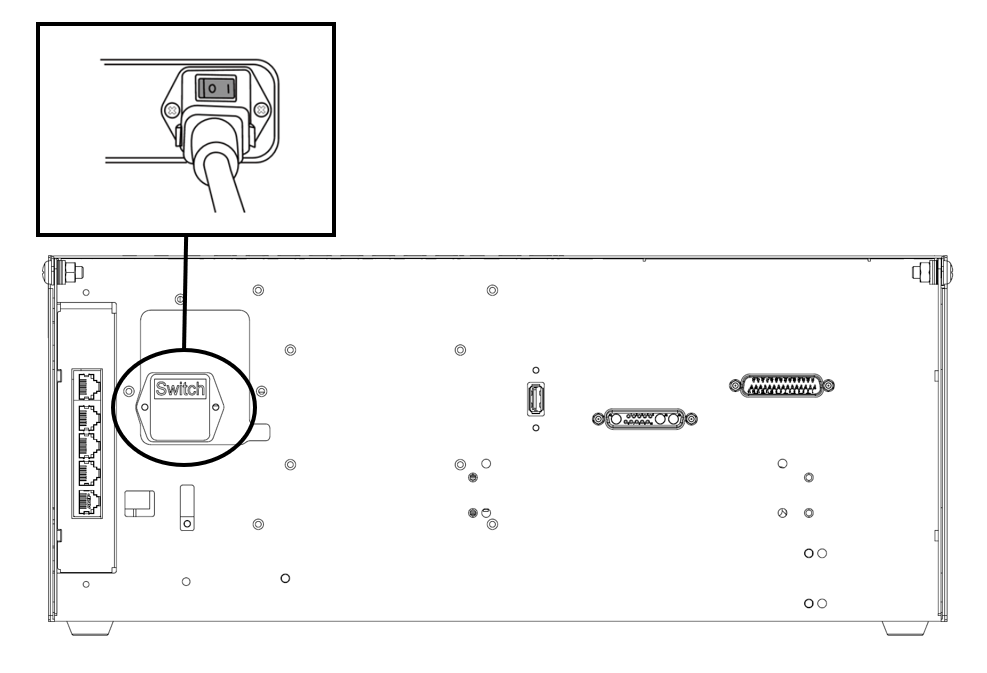
Włączyć kontroler
OBOWIĄZKOWE ŁATWE 1 MIN
-
Naciśnij przełącznik zasilania znajdujący się w dolnej części kontrolera. Zasilanie systemów, takich jak robot, kontroler i manipulator nauczania, jest włączone.
-
Naciśnij i przytrzymaj przycisk zasilania (rys. 2), aż ekran manipulatora uczenia włączy diodę LED manipulatora uczenia (rys.), a dioda LED kołnierza (rys. 3) zacznie migać na czerwono, aż sterownik robota połączy się z siecią.
ㅤ
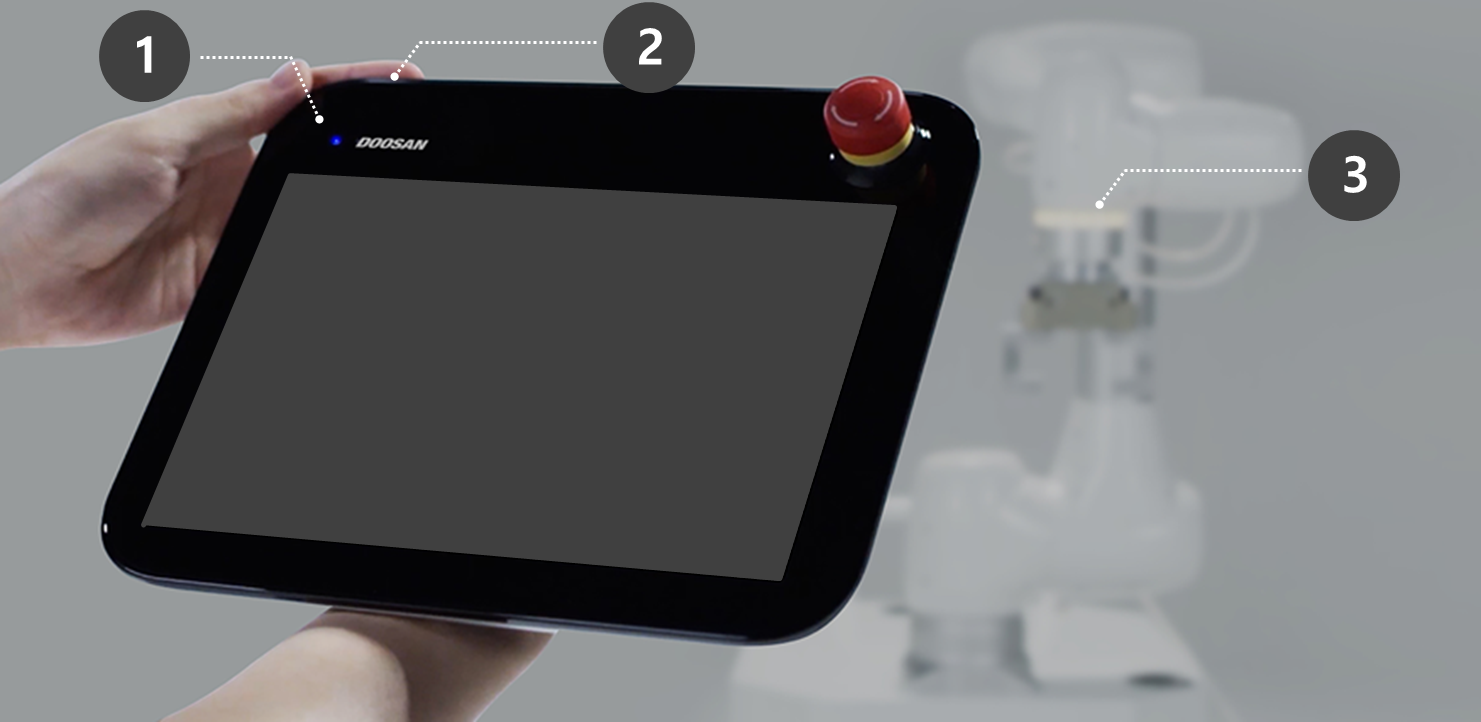
ㅤ
-
Więcej informacji na temat urządzeń innych niż manipulator nauczania można znaleźć w części Włączanie/wyłączanie systemu.
Uwaga
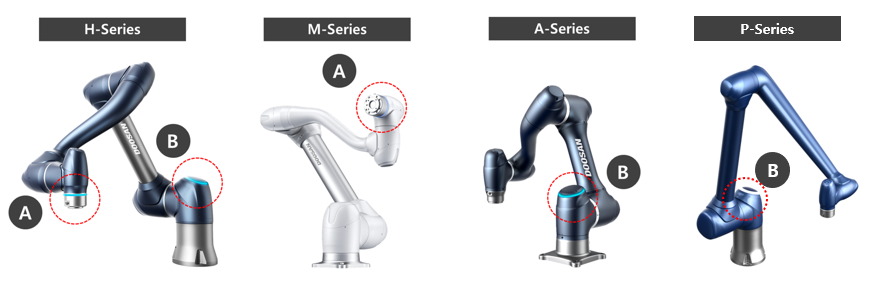
Pozycje diod LED każdej serii robotów Doosan Robotics są następujące:
-
A: Dioda LED kołnierza
-
B: Ox1 LED
Wyłączyć przycisk zatrzymania awaryjnego
OBOWIĄZKOWE ŁATWE 1 MIN
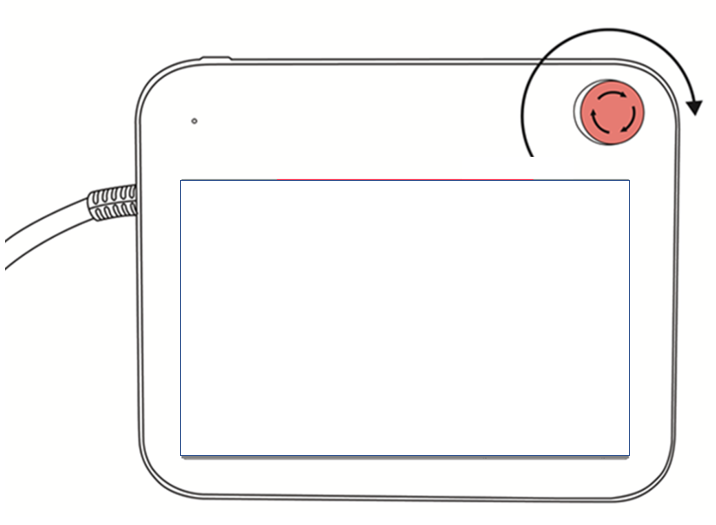
Po zainstalowaniu robota i po pierwszym uruchomieniu systemu, zostanie wyświetlone okno ostrzegawcze, w którym zostanie naciśnięty przycisk zatrzymania awaryjnego manipulatora nauczania. Przycisk zatrzymania awaryjnego musi być wyłączony w celu obsługi robota.
-
Obrócić przycisk zatrzymania awaryjnego w prawo, aby wyłączyć tryb zatrzymania awaryjnego.
Rozłączyć pozycję opakowania
OBOWIĄZKOWE ŁATWE 3 min
Robot znajduje się w pozycji opakowania, aby umożliwić łatwy transport lub pakowanie. Aby korzystać z robota, konieczne jest rozłączenie pozycji opakowania. Ponieważ robot utrzymuje pozycję, która przekracza limit kąta połączenia, gdy znajduje się w pozycji opakowania, nie można ustawić statusu Servo On z powodu naruszenia limitu bezpieczeństwa. Dioda LED robota świeci na czerwono w tym stanie.
Uwaga
Jeśli istnieje przypadek, w którym musisz zapakować robota z powodu przeniesienia, ustaw pozycję opakowania za pomocą ruchu z pozycją opakowania w trybie pakowania.
Unknown Attachment
|
Elementy |
Opis |
|
|---|---|---|
|
1 |
Nazwa modelu |
Zostanie wyświetlona nazwa podłączonego modelu robota. |
|
2 |
Pakuj/rozpakuj |
Można wybrać opcję Pakuj lub rozpakuj. |
|
3 |
Limit pozycji/połączenia opakowania |
Pojawią się wartości graniczne pozycji i stawów. |
|
4 |
Współczynnik prędkości |
Prędkość trybu pakowania lub rozpakowywania można regulować za pomocą suwaka lub wejścia. |
Proces konfiguracji pozycji opakowania jest następujący:
-
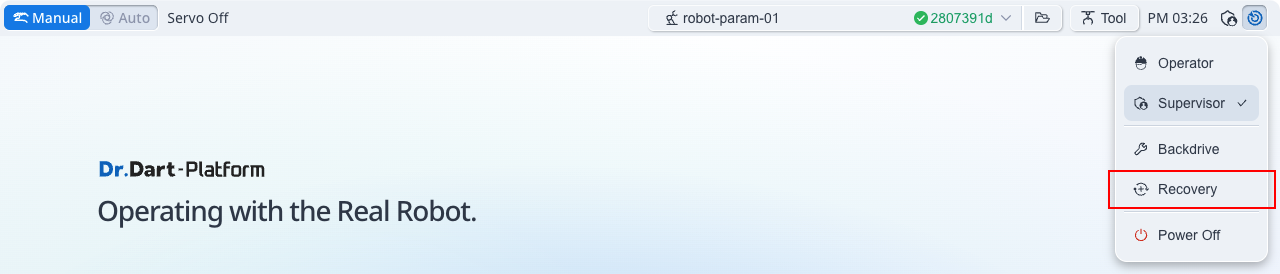
Dotknij menu Odzyskiwanie w okienku nagłówka.
-
Wybierz kartę Tryb pakowania.

-
Dotknij przycisku Servo On, aby uruchomić odzyskiwanie, aby włączyć tryb pakowania.

-
Robot automatycznie przesuwa się do ustawionej pozycji opakowania.
-
Przycisk Pack (Pakowanie) umożliwia ustawienie robota w pozycji Pack, a przycisk Unpack (Rozpakuj) umożliwia ustawienie robota w domyślnej pozycji wyjściowej.
-
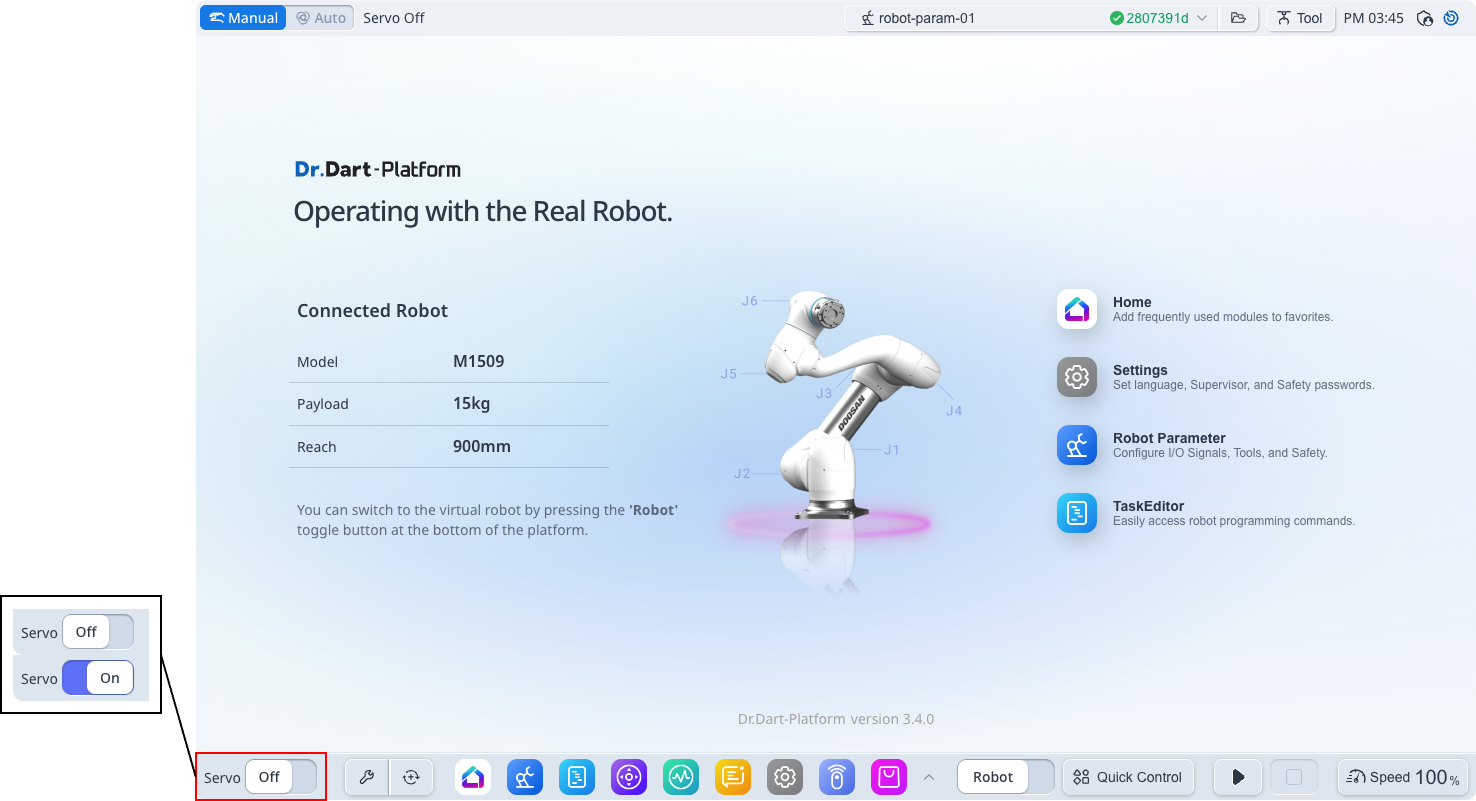
Serwomechanizm wyłączony
OBOWIĄZKOWE ŁATWE 1 MIN
Status serwomechanizmu WŁĄCZENIA to stan, w którym robot jest gotowy do zasilania złączy robota w celu zmodyfikowania pozycji robota.
Nacisnąć przycisk Servo Off (Wył. Serwomechanizmu), aby odciąć zasilanie złączy robota i zatrzymać robota. Aby uzyskać więcej informacji, patrz Przegląd serwomechanizmu na.