ロボット限界設定
[ロボットの境界(Robot Limits)]では、ロボットに関連するさまざまな境界を設定できます。これらの制限は、ロボットが設定された制限内で安全に動作することを保証するために使用されます。
ロボットの制限は、[ ロボットパラメータ(Robot Parameter)]>[安全設定(Safety Settings)]>[ロボットの制限(Robot Limits)]
-
各限界の詳細については、『 ロボット限界』を参照してください。
ロボット限界は大きく3つのカテゴリに分類されます。各カテゴリには、次の画面と機能が含まれます。
Unknown Attachment
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
TCP/Robot |
ロボット限界の大規模な分類 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
力 |
力を設定するために使用します。 |
|
5 |
電源 |
電源を設定するために使用します。 |
|
6 |
速度 |
速度の設定に使用します。 |
|
7 |
運動量 |
運動量を設定するために使用されます。 |
|
8 |
衝突 |
衝突の設定に使用します。 |
|
9 |
保存 |
該当する設定を保存するために使用します。 |
Unknown Attachment
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
ジョイント速度 |
ロボット限界の大規模な分類 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
J1 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
5 |
J2 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
6 |
J3 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
7 |
J4(Pシリーズモデルでは非アクティブ) |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
8 |
J5 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
9 |
J6 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
10 |
保存 |
該当する設定を保存するために使用します。 |
Unknown Attachment
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
ジョイント角度 |
ロボット限界の大規模な分類 |
|
3 |
リセット |
設定をリセットするために使用します。 |
|
4 |
J1 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
5 |
J2 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
6 |
J3 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
7 |
J4(Pシリーズモデルでは非アクティブ) |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
8 |
J5 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
9 |
J6 |
通常モードと縮小モードの設定をそれぞれ設定するために使用します。 |
|
10 |
保存 |
該当する設定を保存するために使用します。 |
安全I/O
この機能は、冗長端子への安全関連信号の入出力に使用されます。安全入出力信号のいずれかが異なる冗長信号を持つことを検出した場合、断線またはハードウェア障害を判断し、STO停止モードでロボットを停止します。
-
安全I/Oを設定するには、 Robot Parameters > Safety Settings > Safety I/Oを選択します。
詳しくは、 安全信号I/Oを参照してください。
入力
Unknown Attachment
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
入力/出力 |
入力/出力のいずれかを選択して設定できます。 |
|
3 |
信号設定 |
各ポートに設定されたオプション
未使用の
|
|
4 |
ロボットの状態に応じてシグナルを無視するかどうかを選択します |
「Protective Stop(保護停止)」信号を選択した場合、「Manual, recovery, HGC(手動、リカバリ、HGC)」ロボット状態で選択した信号を無視するかどうかを設定できます。 |
|
5 |
減速率の設定 |
減速率を設定できます。0~100の範囲で指定できます。 |
|
6 |
保存 |
このボタンを使用すると、入力した設定を保存できます。 |
出力
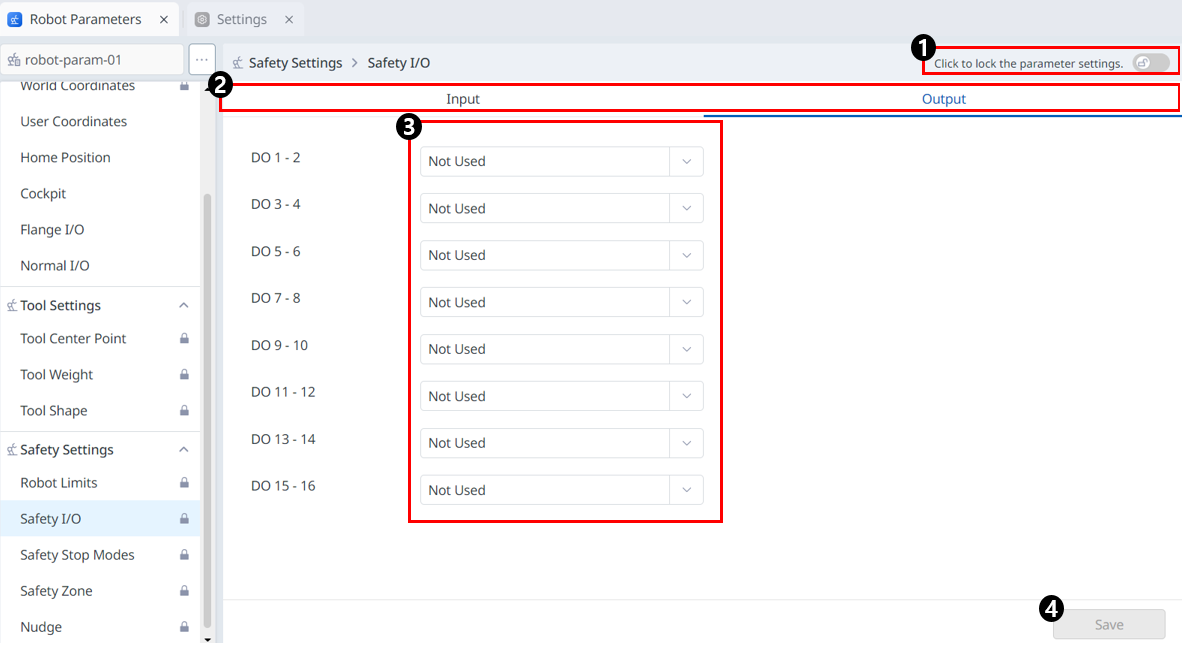
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
入力/出力 |
入力/出力のいずれかを選択して設定できます。 |
|
3 |
信号設定 |
各ポートに設定されたオプション
未使用の
|
|
4 |
保存 |
このボタンを使用すると、入力した設定を保存できます。 |
安全停止モード設定
安全停止の種類と、安全停止を作動/解除する方法を学習します。
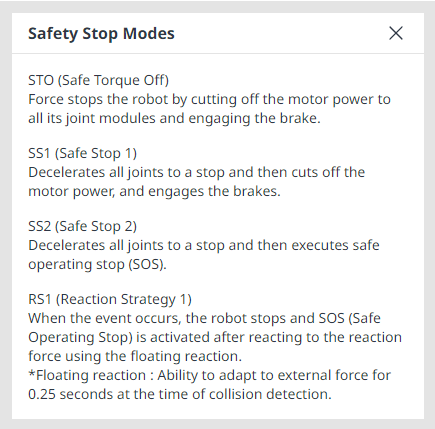
安全停止の種類
ユーザーの安全を確保するために提供される停止モードは次のとおりです。
-
STO (Safe Torque Off): サーボオフを停止します(モーター電源はすぐにオフになります)
-
SS1 (Safe Stop 1): 最大減速停止後のサーボオフ
-
SS2 (Safe Stop 2): 最大減速停止後のスタンバイ(一時停止)
-
RS1: 衝突時には、衝突の反対方向に適合し、スタンバイ状態になります(衝突検出/TCP力の制限違反でのみ設定できます。
Doosan Roboticsのロボットには、2種類の安全停止機能があります。緊急停止は一般的な緊急事態に使用され、緊急停止を解除した後、サーボをオンにした状態でロボットの動作を再開できます。保護停止の場合、ロボットは保護停止の原因を解決して停止を解除することで動作を再開できます。
-
緊急停止: ティーチペンダントまたは追加で取り付けられた外部装置の緊急停止ボタンがアクティブになったときに停止モードを設定します。
-
ティーチペンダントまたはTBSFT EM端子に接続されているペンダントの緊急停止スイッチを押すと作動します。
-
STOまたはSS1のみを選択できます。
-
-
保護停止: 外部に接続された保護装置が活動化されたときに停止モードを設定します。
-
TBSFT PR端子に接続されている保護具が作動すると作動します。
-
安全停止機能の詳細については、「 安全機能」を参照してください。
安全停止の作動/解除方法
ティーチペンダントの緊急停止ボタンを押すか、安全I/Oに接続されている安全装置を起動して、緊急停止を有効にします。安全装置は、 ティーチペンダント画面の[Robot Parameters]>[Safety Settings]>[Safety I/O]機能を使用して、緊急停止または保護停止に接続できます。
-
安全装置を安全I/Oに接続する方法の詳細については、「 コントローラI/Oの接続」を参照してください。
-
プログラムでこの接続の安全停止機能を設定する方法については、「 安全信号I/O」を参照してください。
Unknown Attachment
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
|
2 |
情報メッセージ |
設定に必要な情報を提供するメッセージです。 |
|
3 |
リセット |
設定をリセットするボタン |
|
4 |
緊急停止 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO SS1 |
|
5 |
保護停止 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 SS1 SS2 |
|
6 |
ジョイント角度制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO SS1 SS2 |
|
7 |
ジョイント速度制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
8 |
ジョイントトルク制限違反 |
STOのみが使用可能です。 |
|
9 |
衝突検出 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 RS1 |
|
10 |
TCPロボット位置制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO SS1 SS2 |
|
11 |
TCP方向制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
12 |
TCP速度制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次の項目があります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
13 |
TCP力制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
14 |
運動量制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
15 |
メカニカル制限違反 |
安全停止を選択して、対応する項目に使用できます。 ドロップダウンメニューには、次のものがあります。 STO(H/Pシリーズを除く) SS1 SS2 |
|
16 |
保存 |
このボタンを使用すると、設定値を保存できます。 |
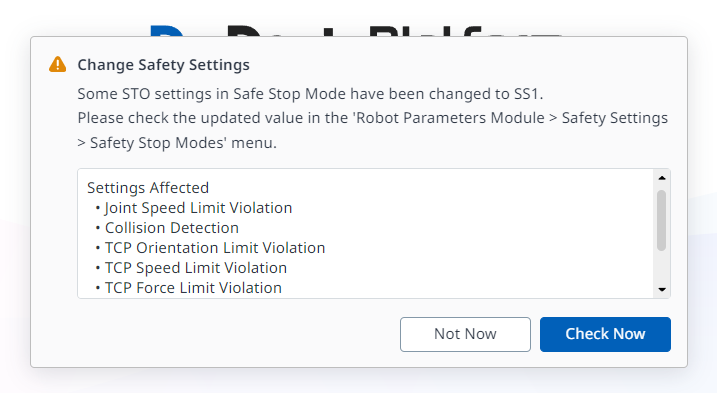
注記
情報メッセージに次のポップアップが表示されます。
注記
バージョン3.2.2から、Hモデルの安全停止モードの一部のSTO設定がSS1に変更されました。
使用中の値が更新されている場合は、次のポップアップが表示されます。