Sub je zkratka pro subrutina. Podrutina označuje proces, který minimalizuje počet kroků v programu tím, že volá potřebné části, když jsou přítomny dvě nebo více duplicitních částí.
-
Roboty Doosan Robotics poskytují příkaz CallSub pro volání podřízených příkazů a odpovídajícího pododstavce.
-
Podpříkaz funguje tak, jak je definován v Pythonu.
Poznámka
-
V části MainSub je třeba přidat odstavec, začátek hlavního odstavce a konec hlavního odstavce EndMainSub.
-
Kromě opakování se podpříkaz používá také ke zjednodušení hlavního odstavce. Použití podpříkazu umožní intuitivní identifikaci toho, jaký úkol hlavního odstavce se v současné době provádí.
-
Použití podpříkazu umožňuje testování jednotky pododstavce.
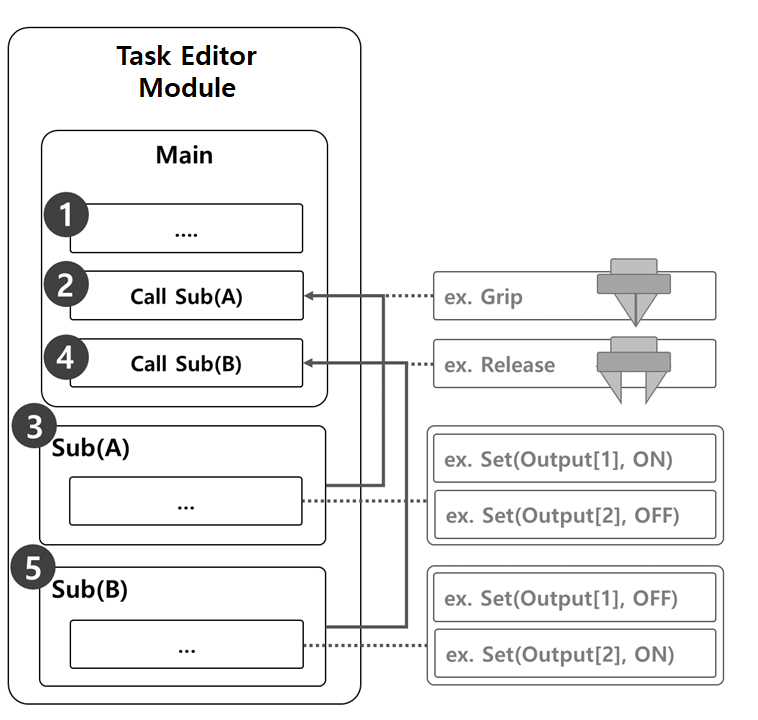
Vzorek, ve kterém se podpříkaz používá k provádění pohybů uchopení a uvolnění robotického chapadla, se skládá z následujících položek.
-
Řádky hlavního odstavce provádějí program úloh v sekvenčním pořadí od prvního řádku.
-
Přechod na Sub(A) volaný pomocí Call Sub.
-
Vzorek
-
Program: Volejte podrežim Grip.
-
Robot: Bez pohybu
-
-
-
Sub(A) se provádí. Všechny řádky pododstavců se provádějí v sekvenčním pořadí, vrací se do hlavního odstavce a provede další řádek.
-
Vzorek
-
Program: Proveďte řádky podřízené rutiny Grip v sekvenčním pořadí. Pomocí příkazu set nastavte výstup [1] jako ZAP a výstup [2] jako VYP.
-
Robot: Robot chapper provádí Grip pohyb.
-
-
-
Přechod na Sub(B) volaný pomocí Call Sub.
-
Vzorek
-
Program: Volejte podrežim uvolnění.
-
Robot: Bez pohybu
-
-
-
Sub(B) se provádí. Všechny řádky pododstavců se provádějí v sekvenčním pořadí, vrací se do hlavního odstavce a provede další řádek.
-
Vzorek
-
Program: Proveďte řádky podřízené rutiny Grip v sekvenčním pořadí. Pomocí příkazu set nastavte výstup [1] jako VYPNUTO a výstup [2] jako ZAP.
-
Robot: Robot chapper provádí uvolnění pohybu.
-
-
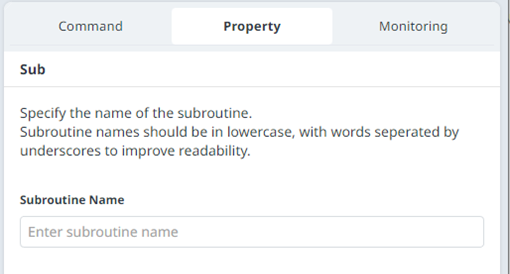
Přidat podpříkaz
-
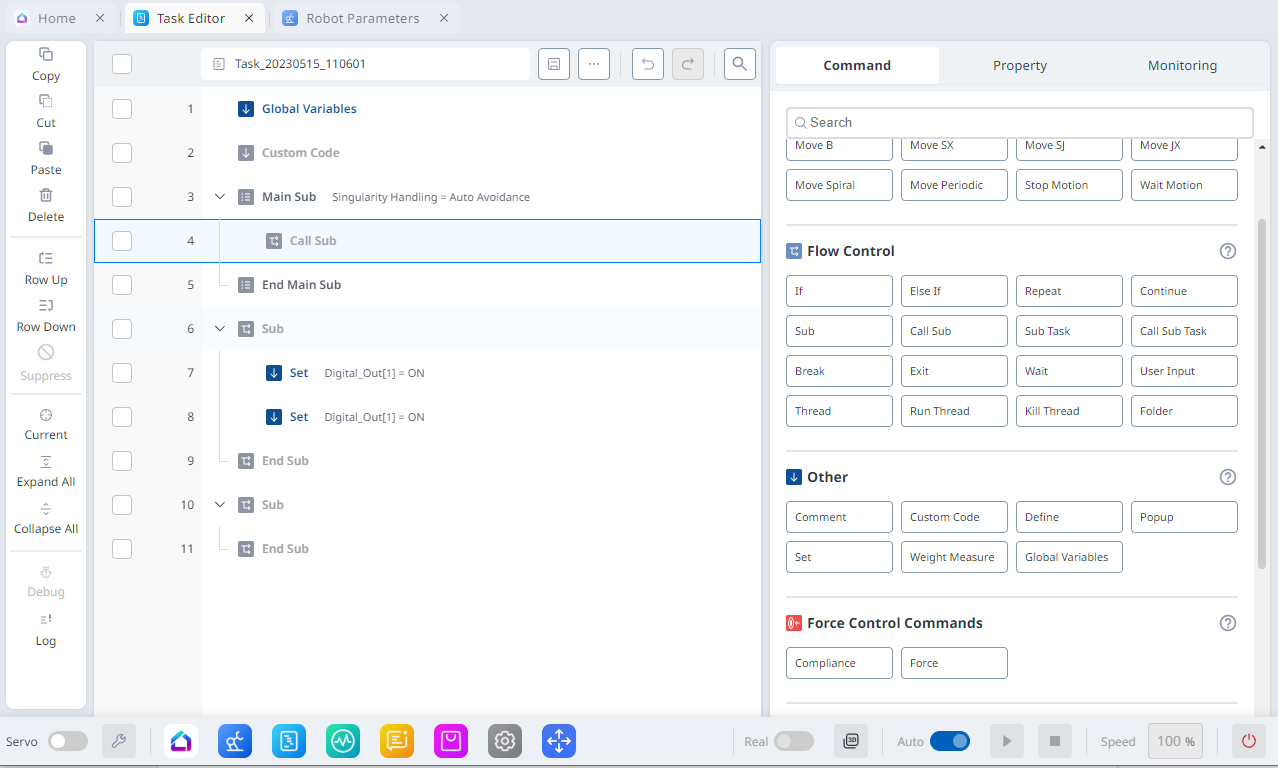
V modulu Editor úloh v části řízení toku v nabídce příkaz na pravé straně přidejte podpříkaz.
-
Zadejte název podrutiny.
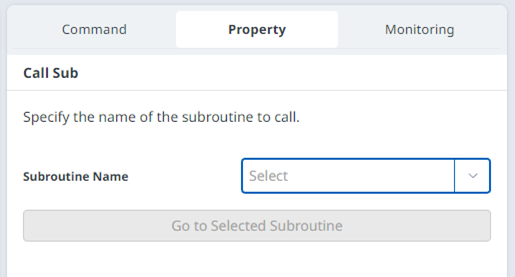
Přidat příkaz CallSub
-
V modulu Editor úloh přidejte v části řízení toku v nabídce pravého příkazu příkaz Call Sub.
-
Vyberte název podrutiny zaregistrovaný pomocí podpříkazu.
Poznámka
-
Pokud se počet řádků v programu úloh zvýší, může být obtížné najít podrutiny. V takovém případě stisknutím tlačítka Přejít na vybranou podřízenou rutinu v příkazu vlastnost CallSub přesunete fokus na odpovídající podpříkazový řádek.