Uživatel může vybrat metodu ručního pohybu na kartě JOG.
-
JOG: Přesune kloub robota nebo TCP do osy spoje nebo osy souřadnic, kterou uživatel vybral
-
Přesunout: Přesune kloub robota nebo TCP do cílového bodu, který uživatel zadal
Pohyb robota se skládá ze dvou typů.
-
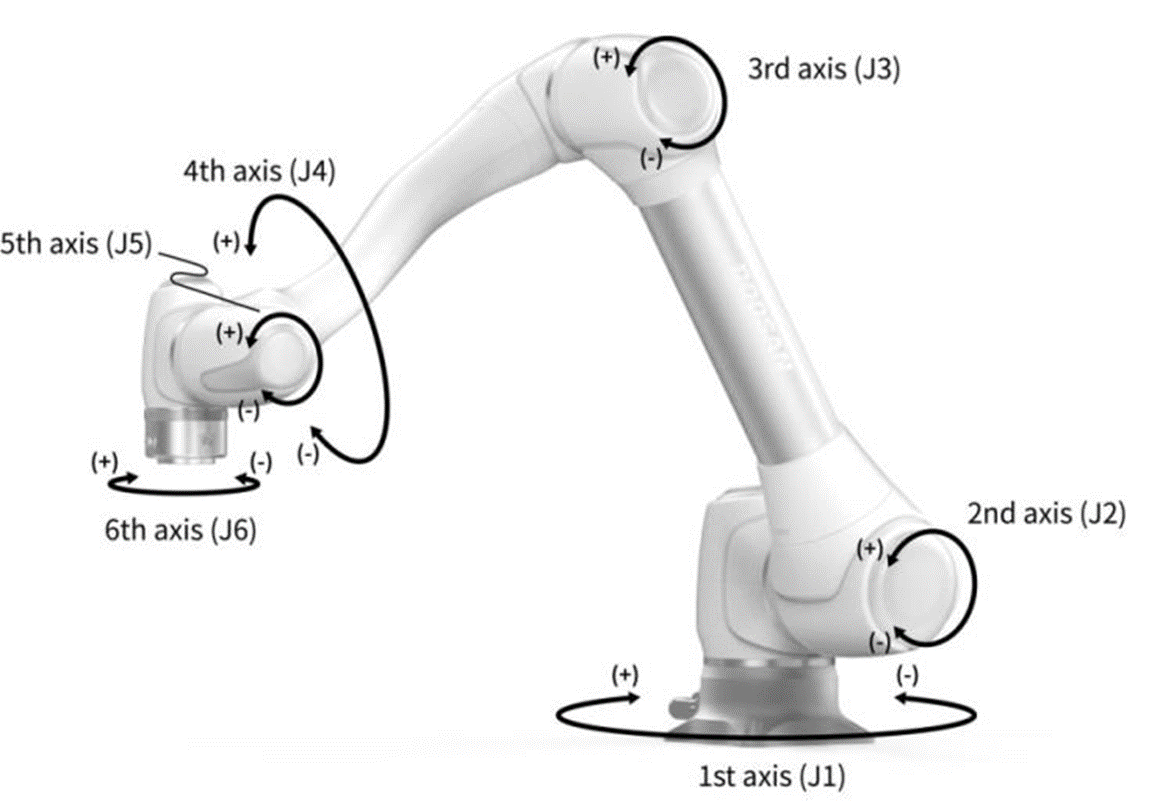
Společný pohyb: Pohybuje se každý spoj lineárně s rotujícím pohybem
-
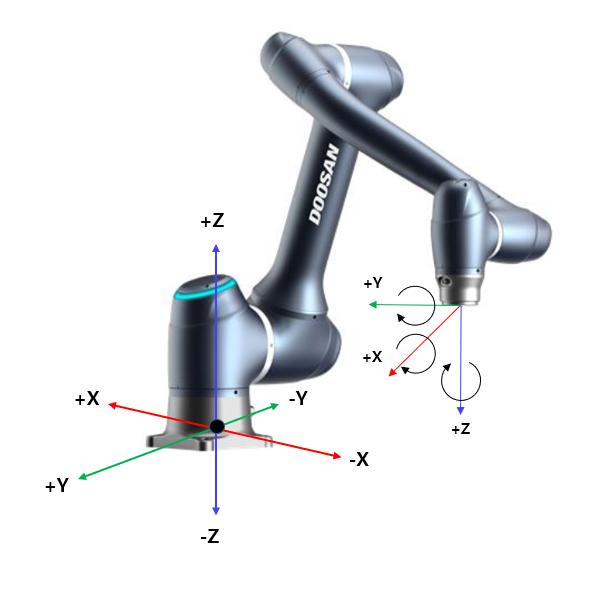
Pohyb úlohy: Posouvá konec lineárně k cílovému bodu
Následující postup je postup pohybu robota pomocí pohybu kloubu z obrazovky JOG:
-
Vyberte kartu spoj.
-
Vyberte osu, kterou chcete přesunout. Můžete například vybrat J1.
-
Stisknutím tlačítka +/- přesuňte robota. Robot se pohybuje, když je stisknuto tlačítko +/- a aktuální umístění se zobrazuje na obrazovce v reálném čase.
Následující postup je postup, jak přesunout robota pomocí pohybu úlohy na obrazovce JOG:
-
Vyberte základní souřadnice. Robot může být přemístěn podle souřadnic ZÁKLADNY nebo souřadnic NÁSTROJE.
-
Vyberte směr pohybu. Lze například vybrat osu X.
-
Stisknutím tlačítka +/- přesuňte robota. Robot se pohybuje, když je stisknuto tlačítko +/- a aktuální umístění se zobrazuje na obrazovce v reálném čase.
Další informace o pohybu, pohybu a zarovnání JOG naleznete v části Panel JOGa panel Move .
Poznámka
Pokud je přepínač skutečného režimu v levém horním rohu obrazovky Jog vypnutý, robot se pohybuje pouze na virtuální obrazovce vlevo od obrazovky Jog. Skutečný robot se pohybuje, pokud je zapnut přepínač skutečného režimu.
S modulem Jog Plus může uživatel prozkoumat celý pracovní prostor v ručním režimu nebo nastavit provozní prostor jako provozní prostor robota. Úhel pohybu každé osy může být omezen podle zvoleného provozního prostoru a limitu úhlu kloubu bezpečnostního nastavení.
Chcete-li použít funkci Jog Plus, klepněte na modul Jog Plus v hlavní nabídce.
-
Funkci JOG nelze použít při vypnutí serva.
-
Robot je ovládán ručně na obrazovce Jog Plus, takže robot se pohybuje pouze při stisknutí tlačítka Jog.
-
Robot je možné pohybovat na základě aktuální polohy na obrazovce karty Jog Plus.
-
Robot lze přesunout konfigurací cílového úhlu/souřadnic na obrazovce karty přesunout.
-
Na obrazovce karty Jog Plus je možné nakonfigurovat referenční souřadnice a přesunout obrazovku karty jako spoj nebo úkol.
Poznámka
Pokud robot nemůže být navigován z důvodu umístění v jiném prostoru než v provozním prostoru režimu Jog Plus, nastavte provozní prostor robota na „žádný“, aby bylo možné robota navigovat.
Poznámka
Tento modul není k dispozici v automatickém režimu. Klepnutím na přepínač v pravém dolním rohu je dostupný v ručním režimu.
Použití funkce Job Plus (Jog+) umožňuje používat funkci JOG současně při provádění jiné práce. To lze použít, pokud je nutné ruční ovládání pro přesun robota do cílového bodu během výuky.