Upozornění
Před zkoušením vzorku se ujistěte, že jste si přečetli a dodržujete bezpečnostní opatření. Další informace naleznete v ČÁSTI 1. Bezpečnostní příručka.
Poznámka
Tento vzorek vyžaduje soubor zapisovače úloh vytvořený ve Vyzkoušejte vzorky příkazu compliance
-
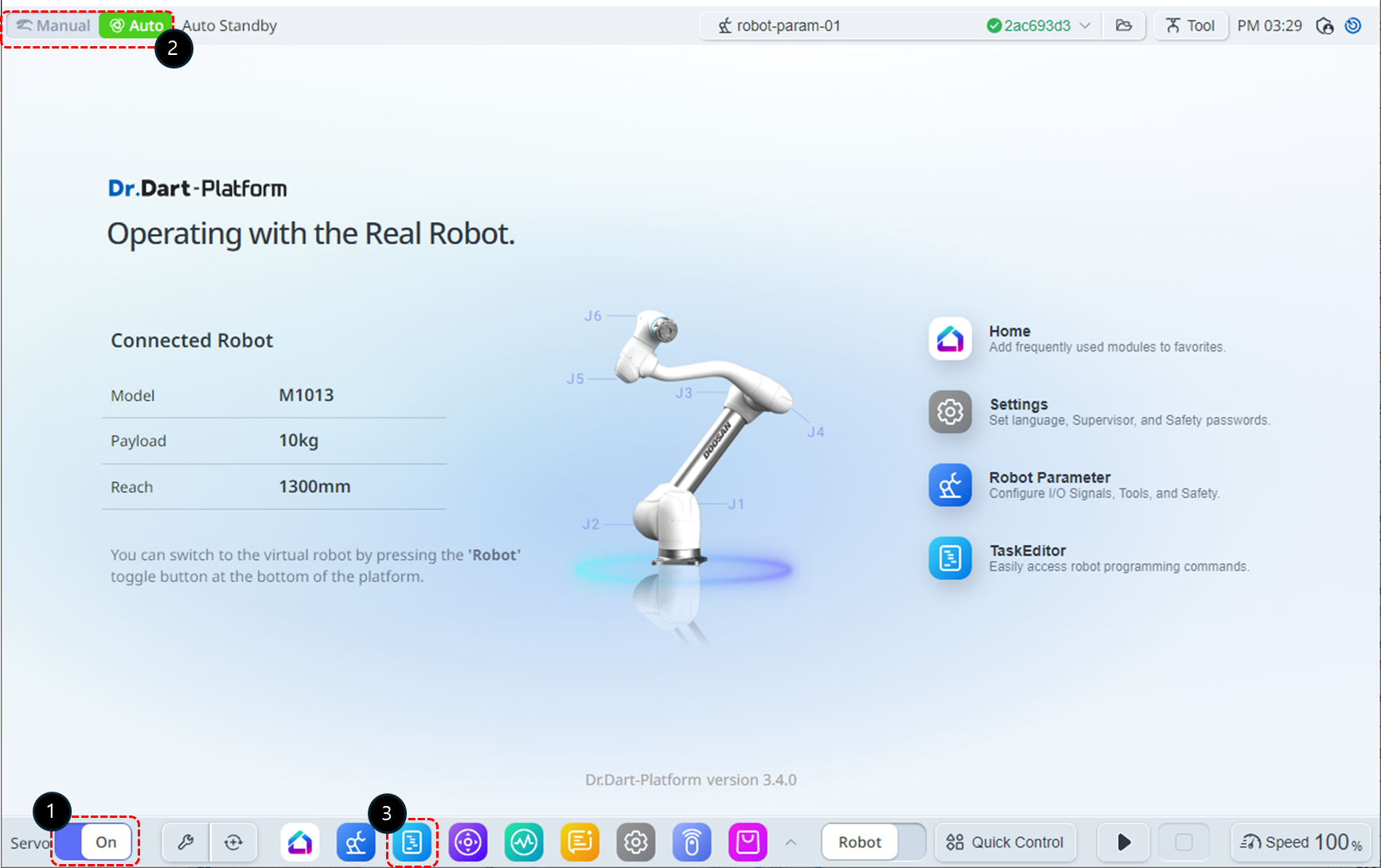
Změňte stav Servo na Zapnuto.
-
Přepněte provozní režim do ručního režimu.
-
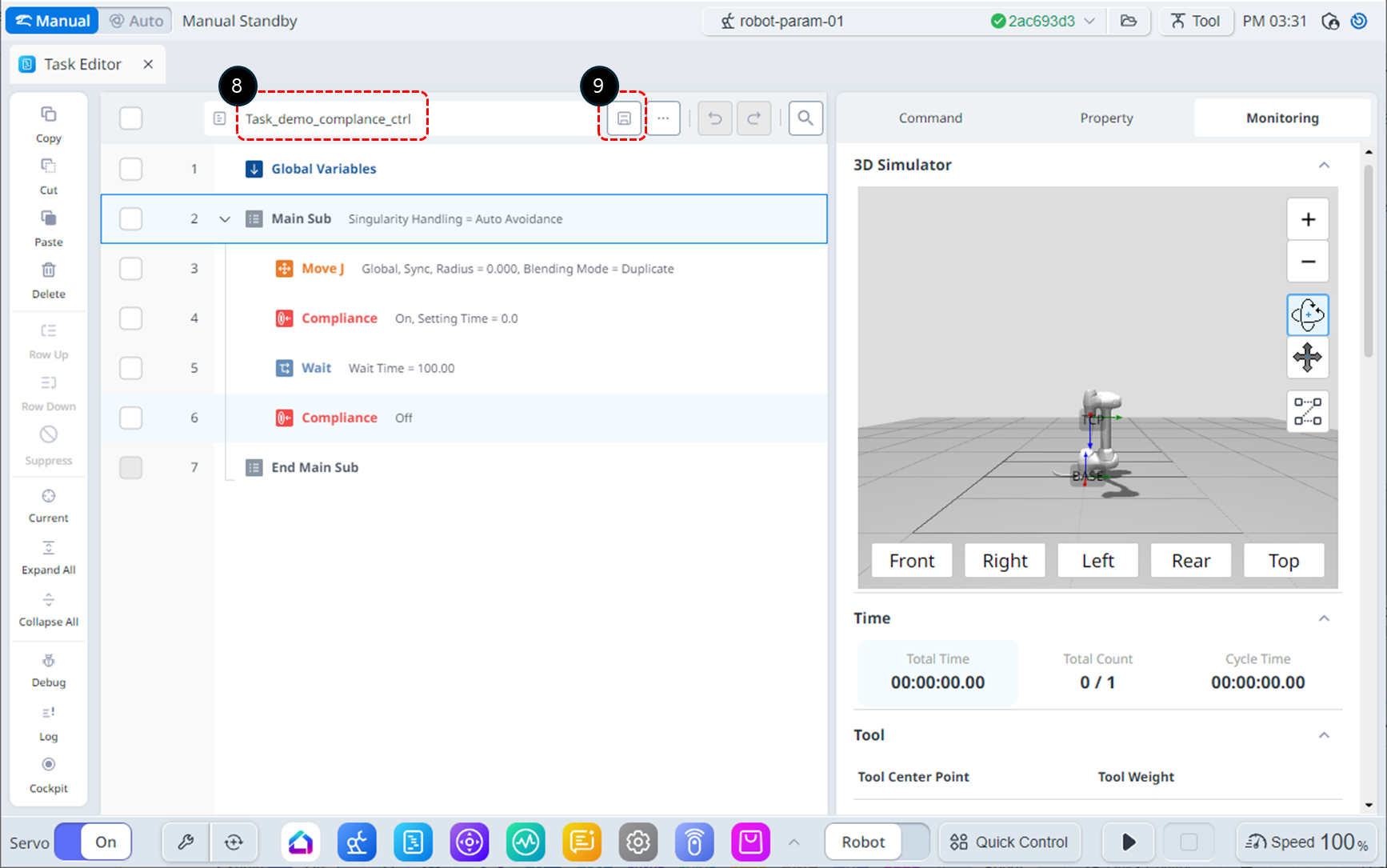
V dolní nabídce vyberte modul Editor úloh.
-
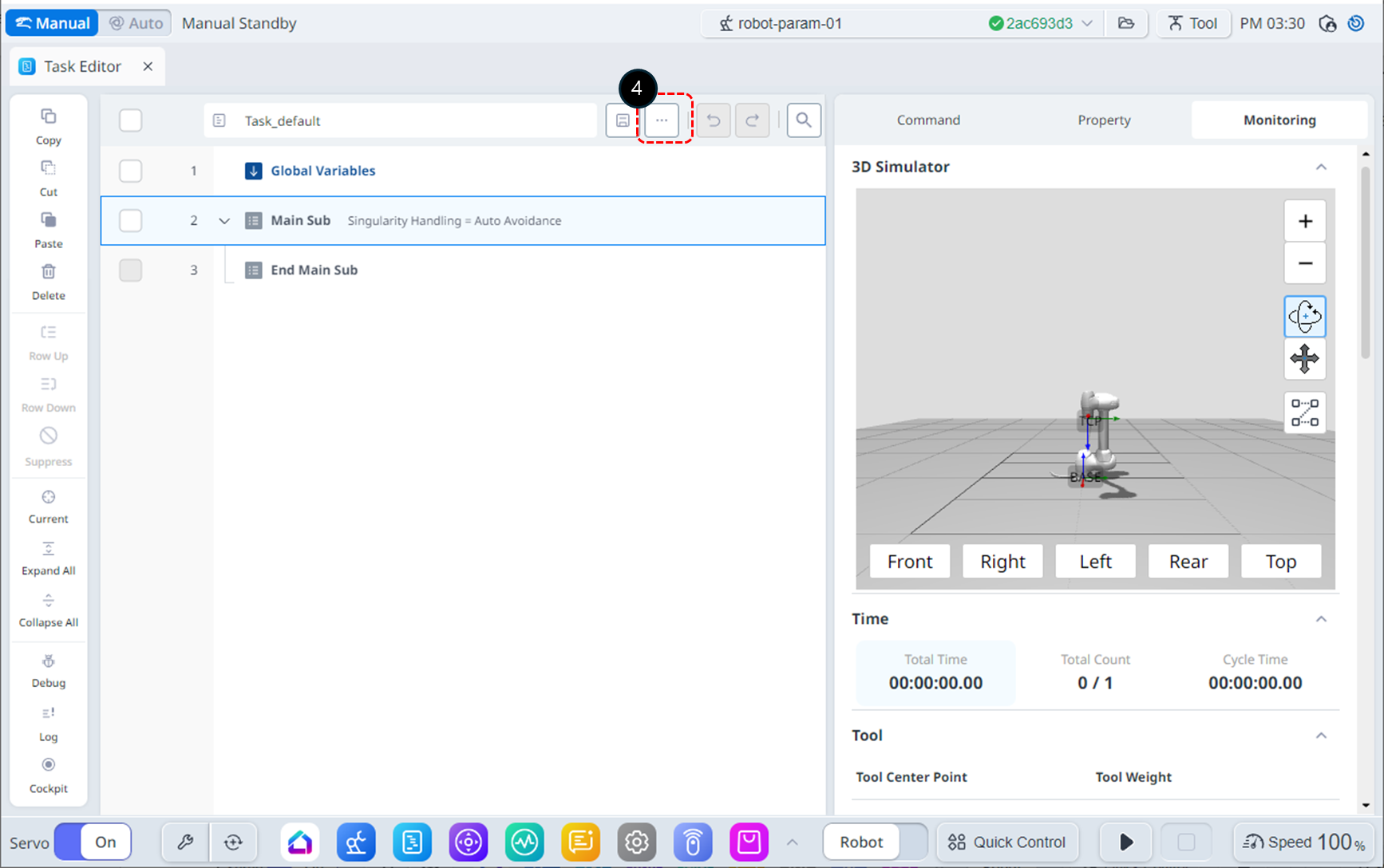
Klikněte na tlačítko soubor.
-
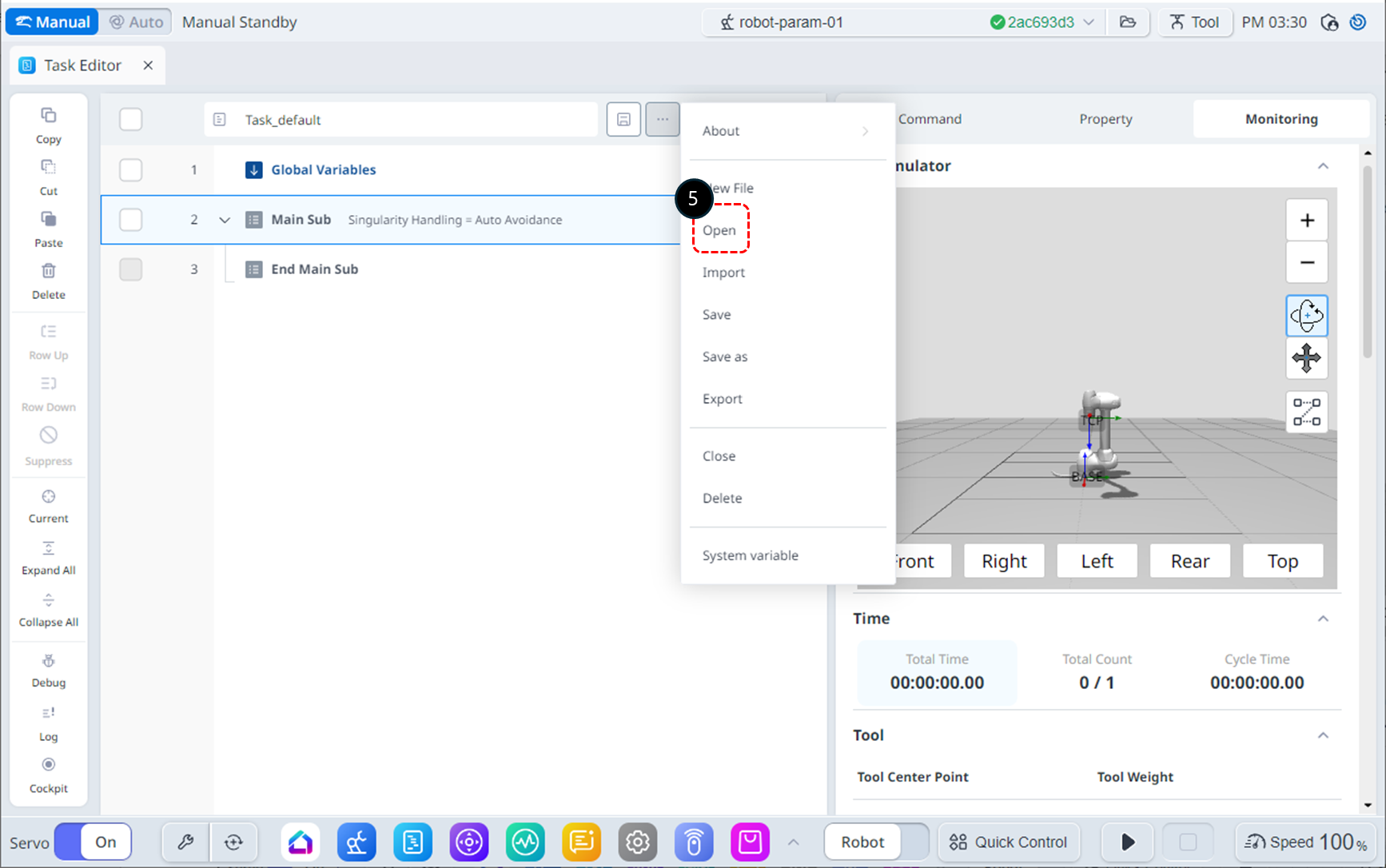
Klepněte na tlačítko Otevřít.
-
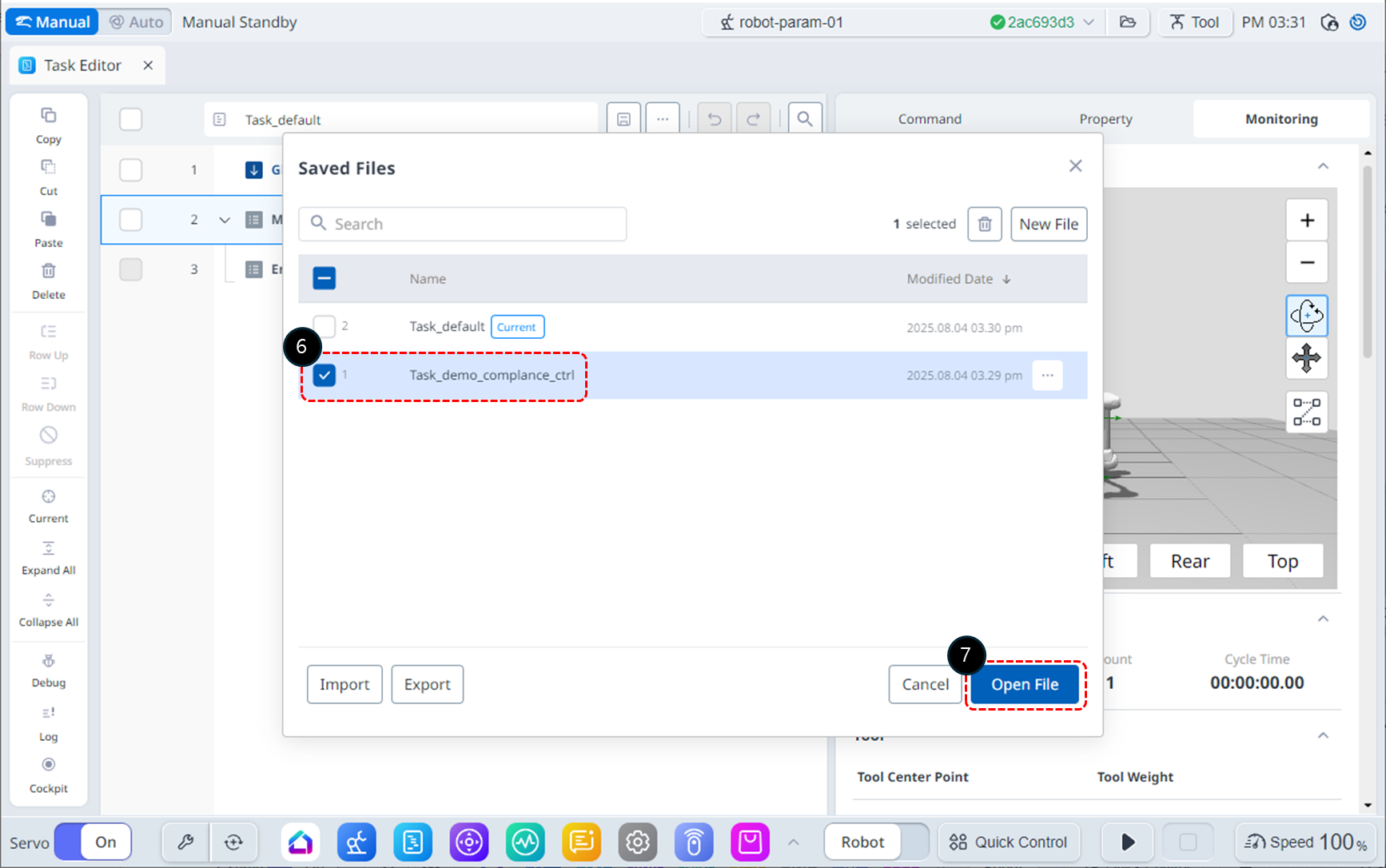
Vyberte soubor Task_demo_Compliance_ctrl vytvořený ve vzorcích příkazu TRY Compliance.
-
Klikněte na tlačítko Otevřít soubor.
-
Přejmenujte soubor na Task_demo_Force_ctrl.
-
Klepnutím na tlačítko Uložit uložte název souboru.
-
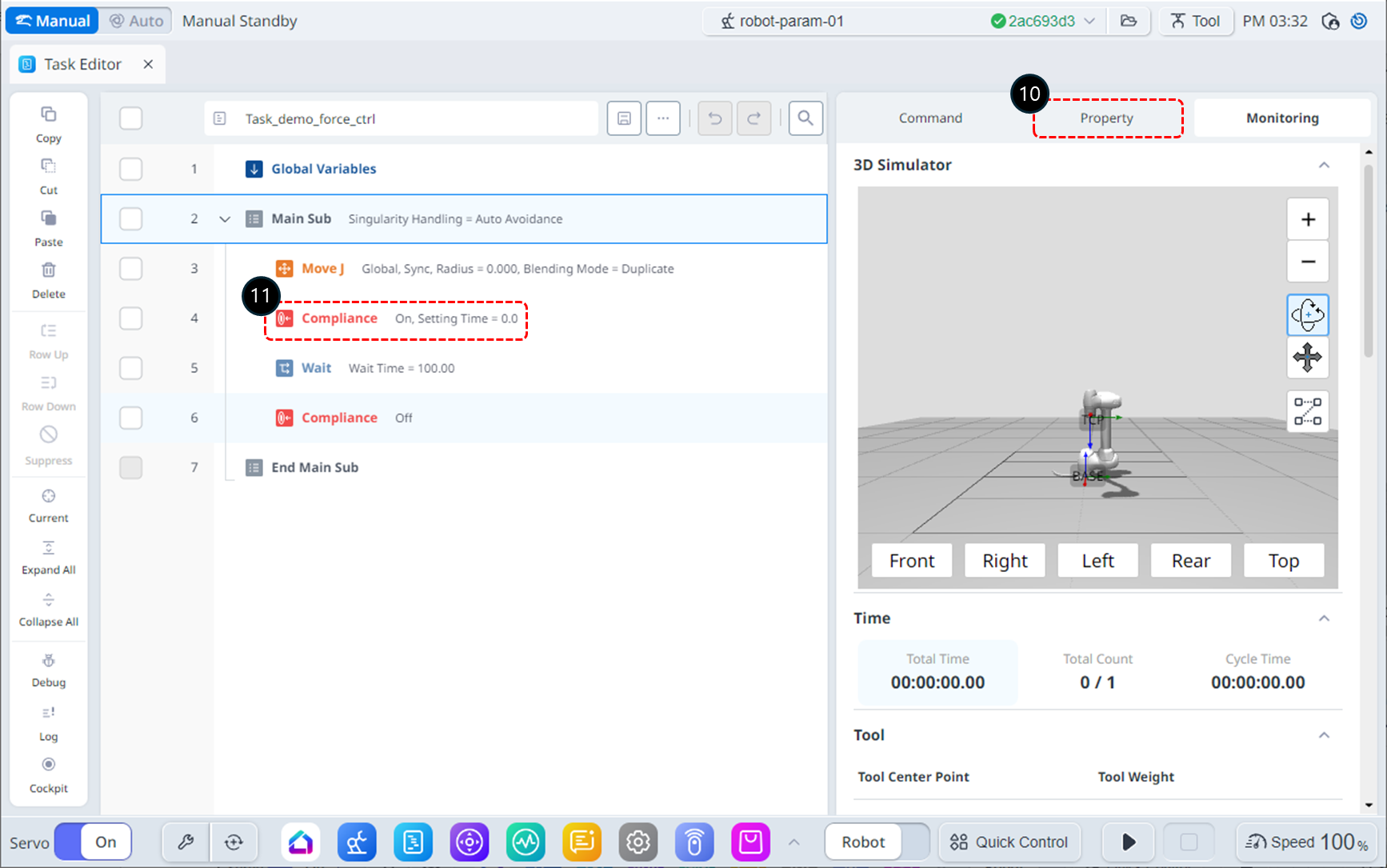
Vyberte kartu Vlastnosti.
-
Zvolte příkaz compliance na 4. Řádku.
-
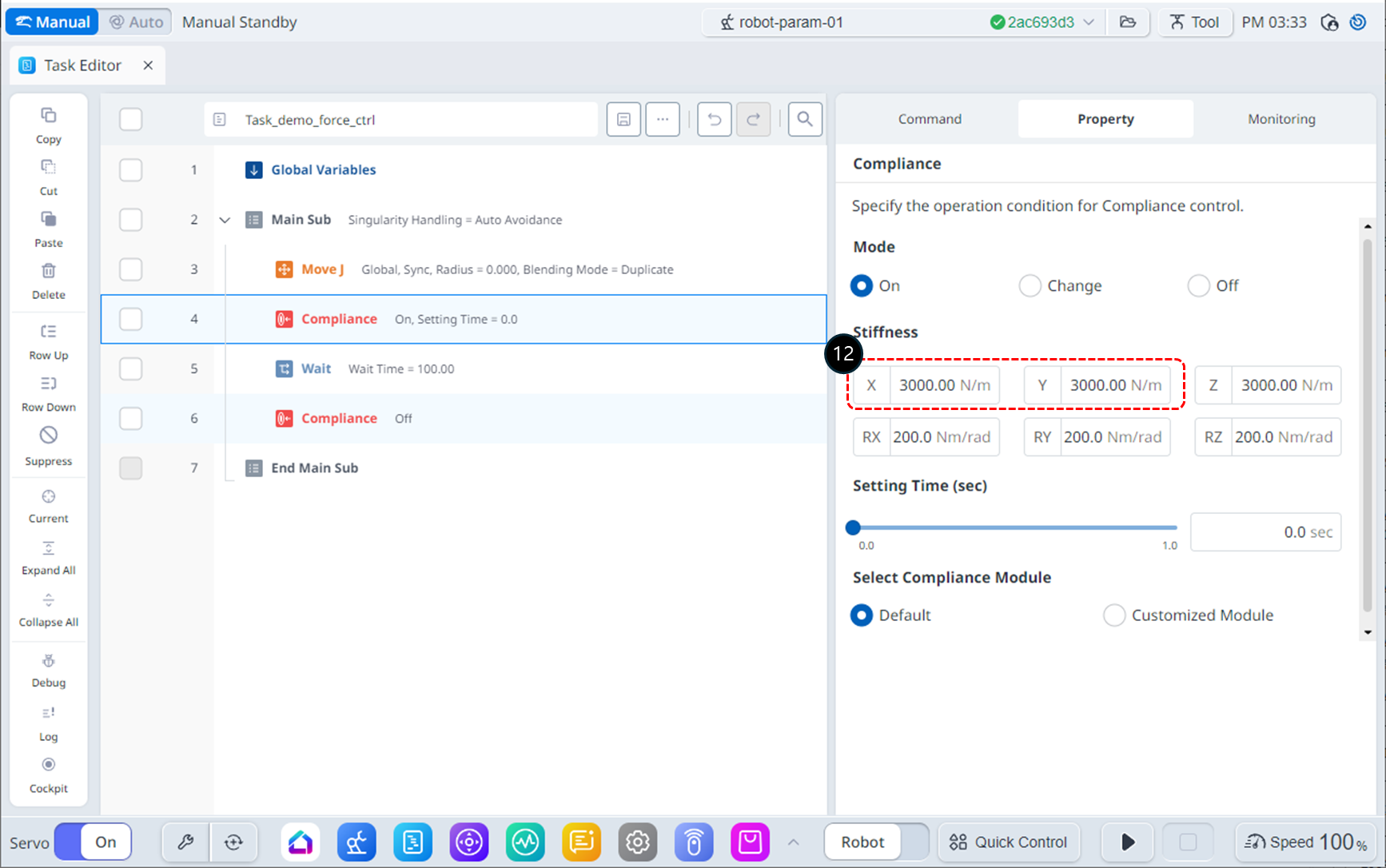
Nastavte tuhost na výchozí hodnoty následujícím způsobem.
-
X, Y, Z: 3000 N/m (výchozí)
-
RX, Ry, Rz: 200 Nm/rad (výchozí)
-
-
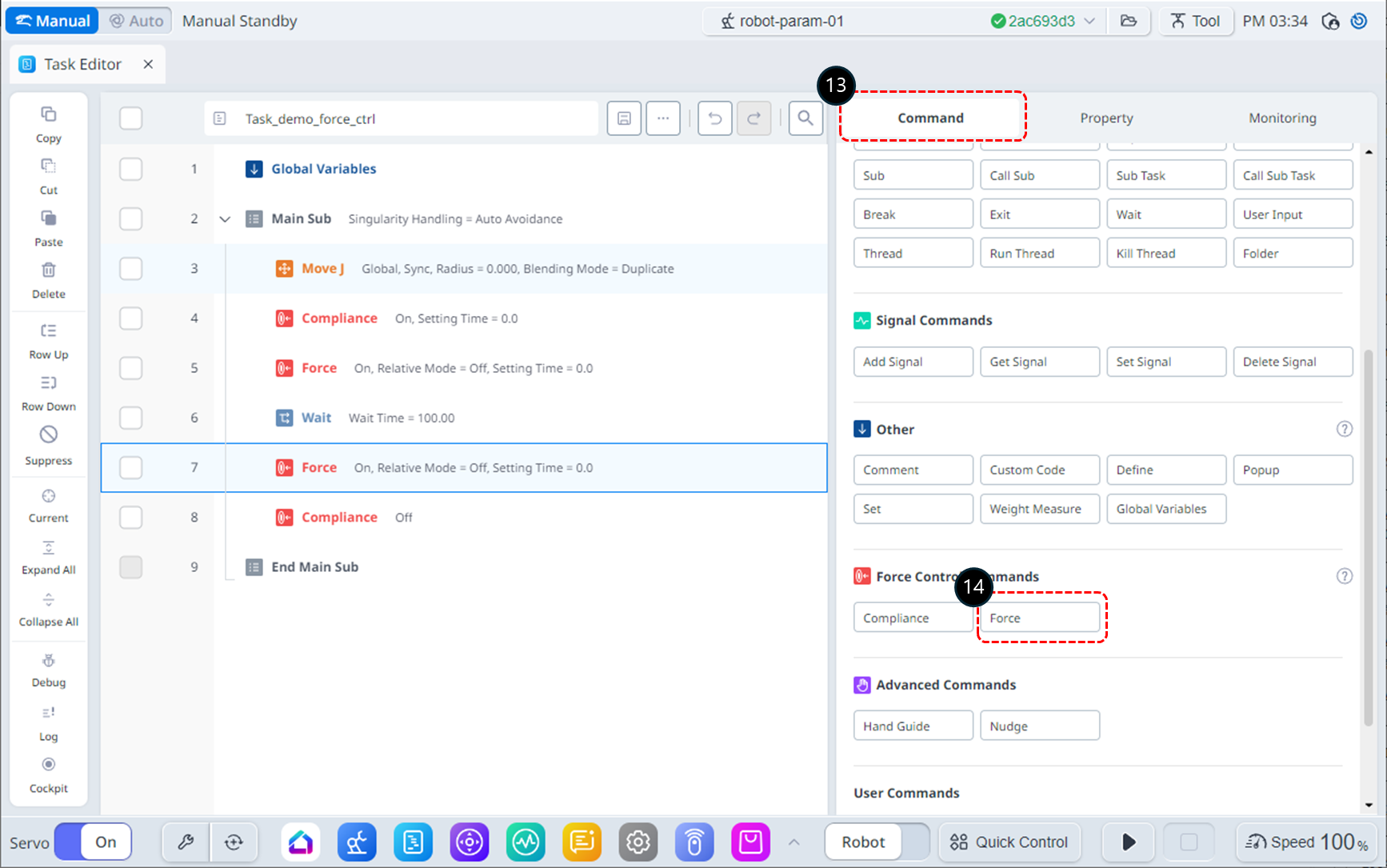
Vyberte kartu příkaz.
-
Přidejte příkaz síly do 5. A 7. Řádku. Tyto příkazy budou použity k aktivaci a deaktivaci Force Control.
-
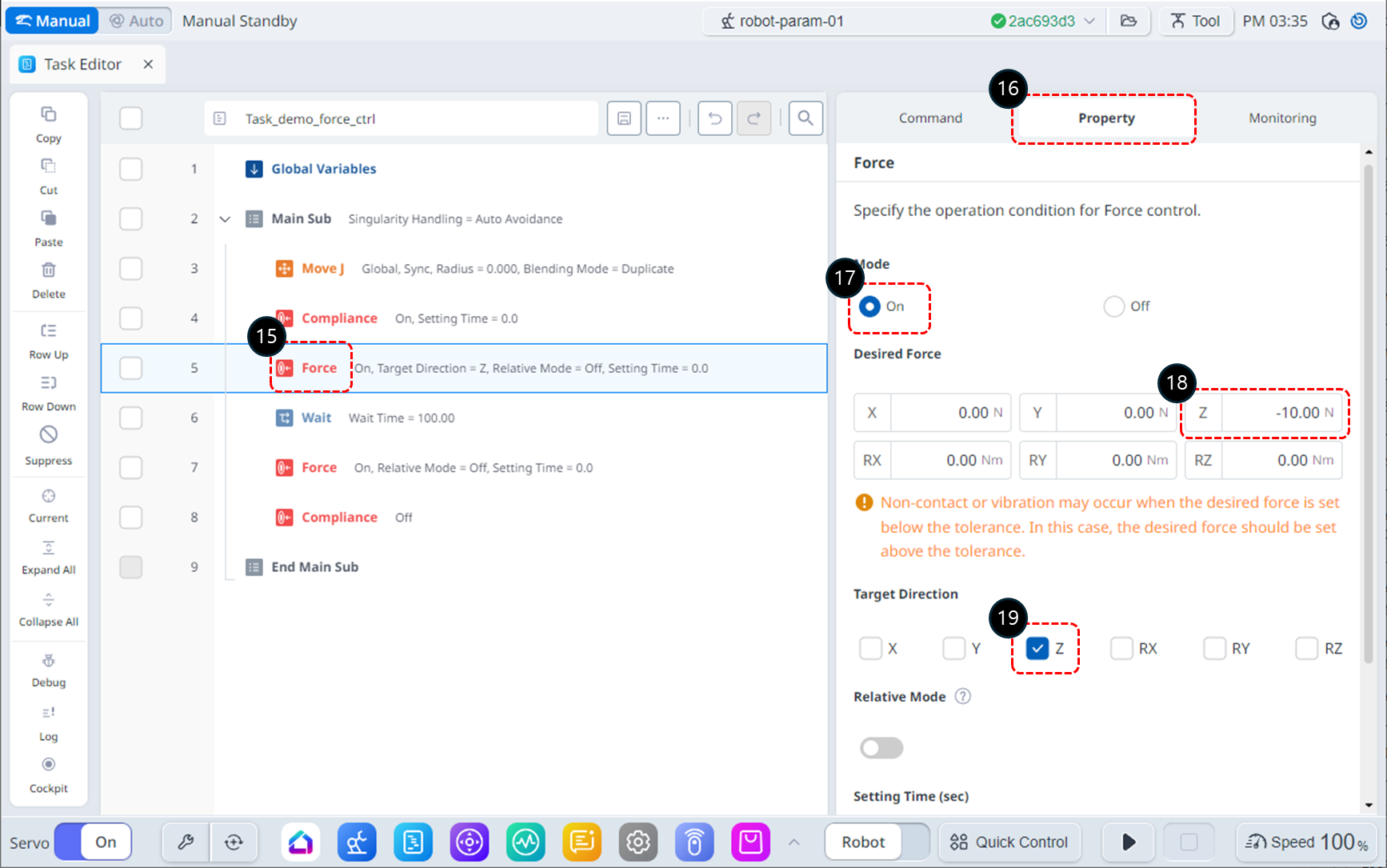
Vyberte příkaz síla na 5. Řádku.
-
Přejděte na kartu Vlastnosti.
-
Nastavte režim následovně: Režim ZAPNUTO aktivuje ovládání síly.
-
Režim: Zapnuto
-
-
Nastavte požadovanou sílu následujícím způsobem.
-
X: 0 N (výchozí)
-
Y: 0 N (výchozí)
-
Z: -10 N
-
RX, Ry, Rz: 0 Nm/rad (výchozí)
-
-
V cílovém směru zkontrolujte pouze osu z .
-
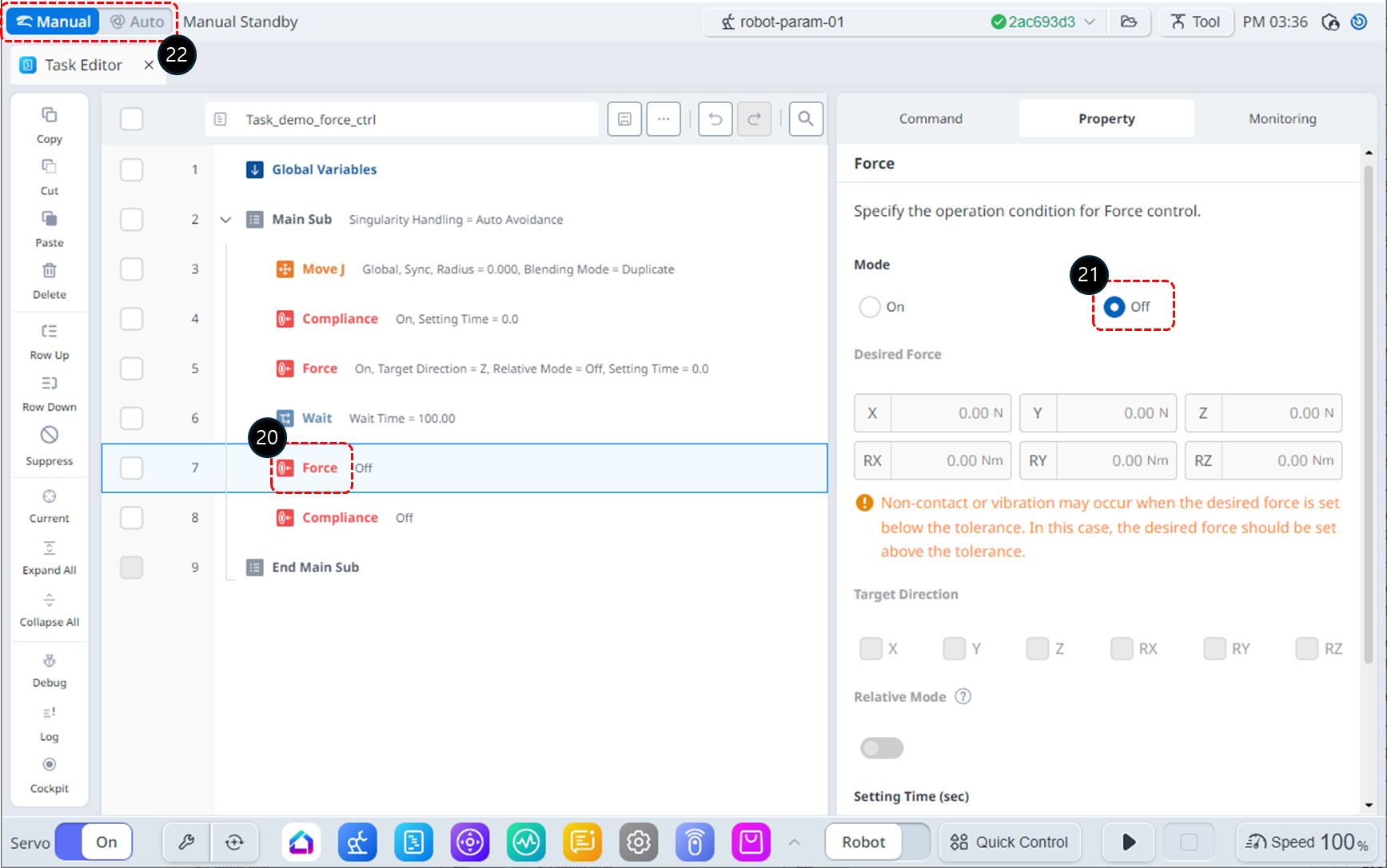
V seznamu úkolů vyberte příkaz síla na řádku 7.
-
Nastavte režim následovně: Režim Vypnuto deaktivuje ovládání síly.
-
Režim: Vypnuto
-
-
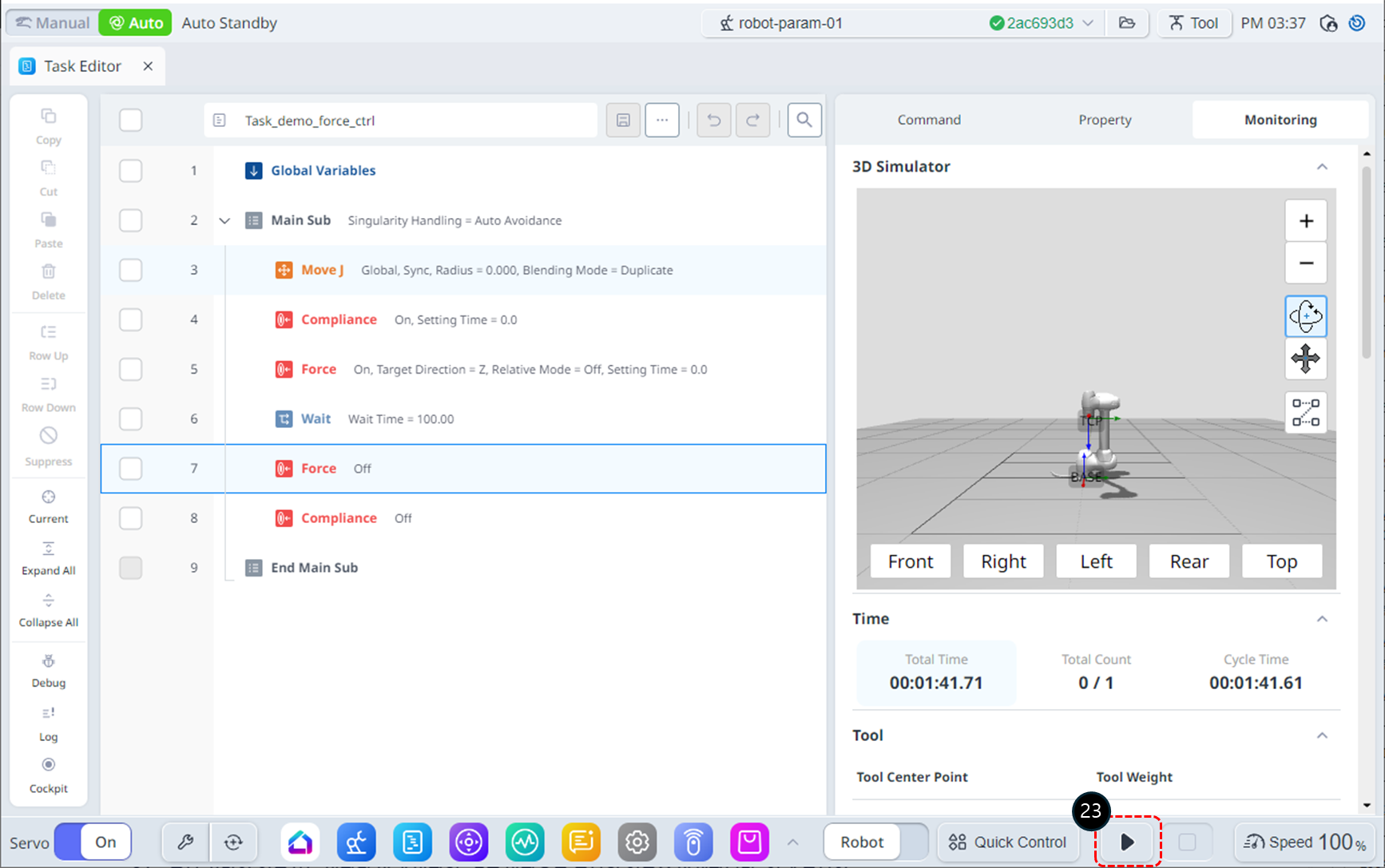
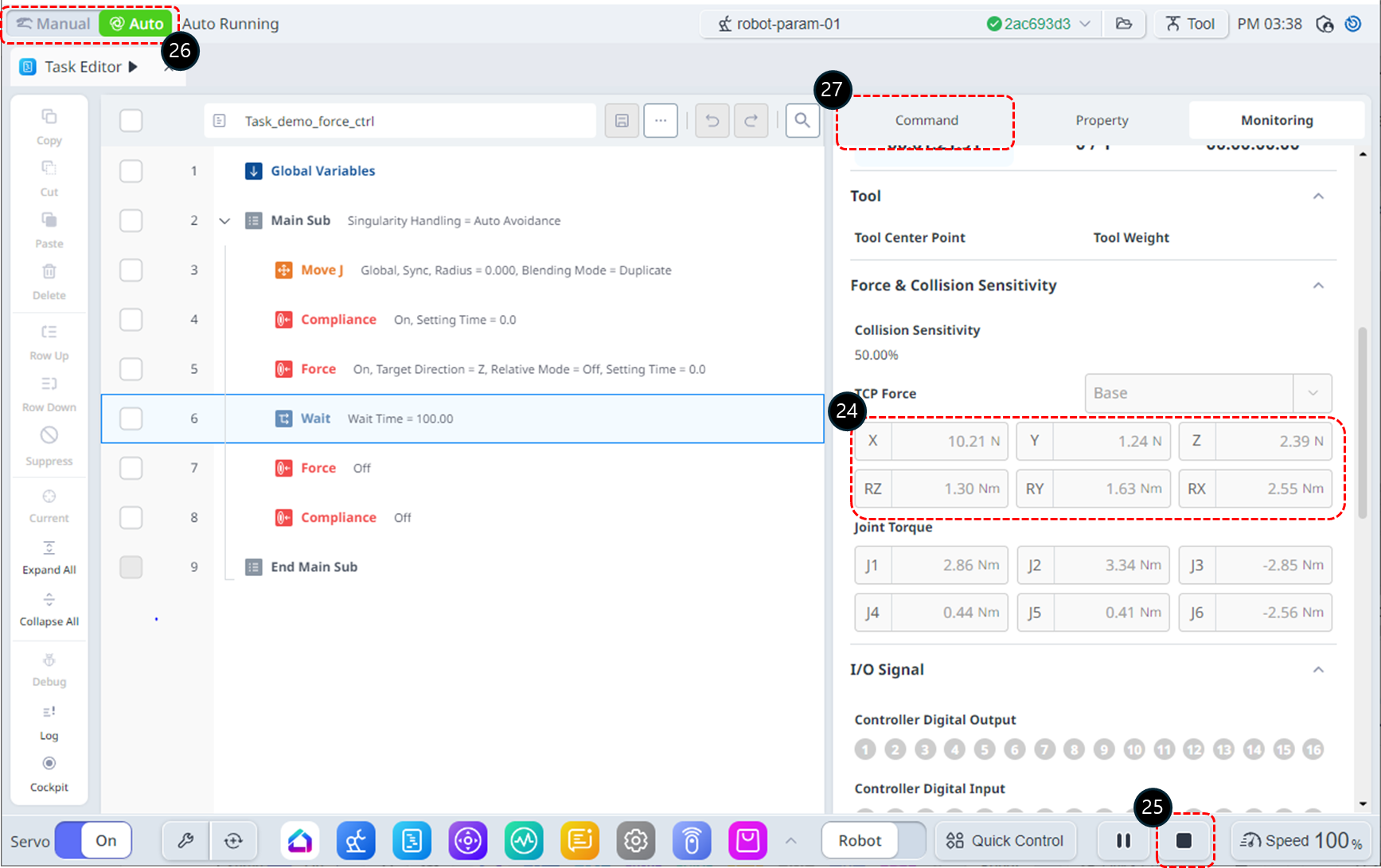
Přepněte provozní režim do režimu Auto. Karta Vlastnosti se automaticky přepne na kartu monitorování.
-
Klepněte na tlačítko Spustit. Ve stavu čekání robot pracuje následovně:
-
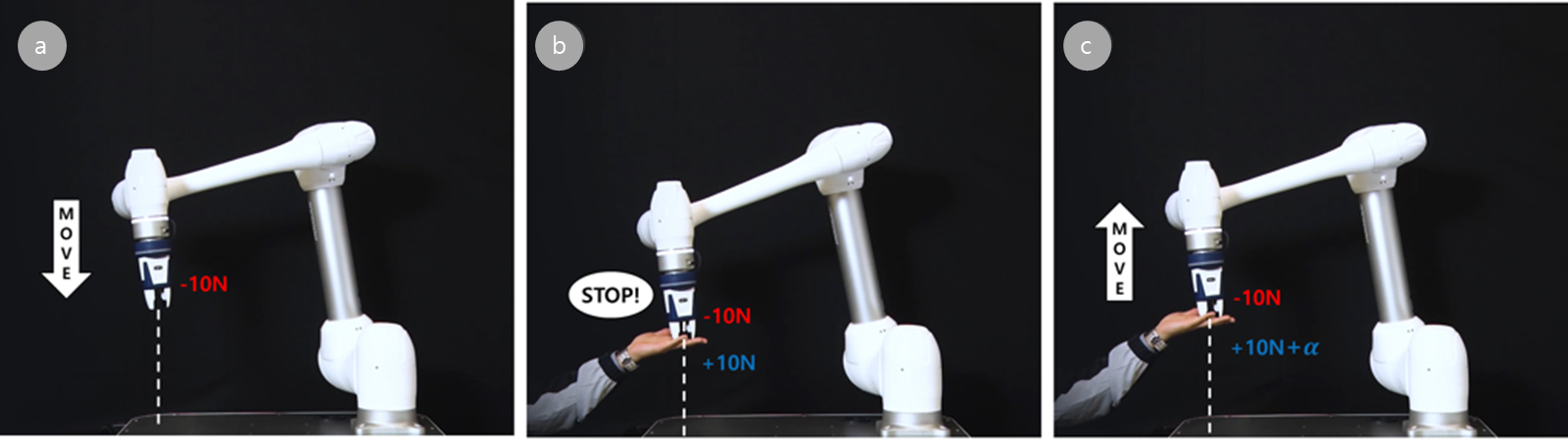
Síla -10N je aplikována na koncový efektor robota, což způsobuje, že se robot pomalu pohybuje ve směru -Z.
-
Použijte protilehlou sílu ve směru +z , která je proti pohybu robota. Když je síla působící robotem a protilehlé síly vyrovnaná, robot se zdá, že drží svou pozici, jako by byl v klidu.
-
Pokud je na robota použita síla větší než +10N, bude se pohybovat ve směru použité síly.
-
-
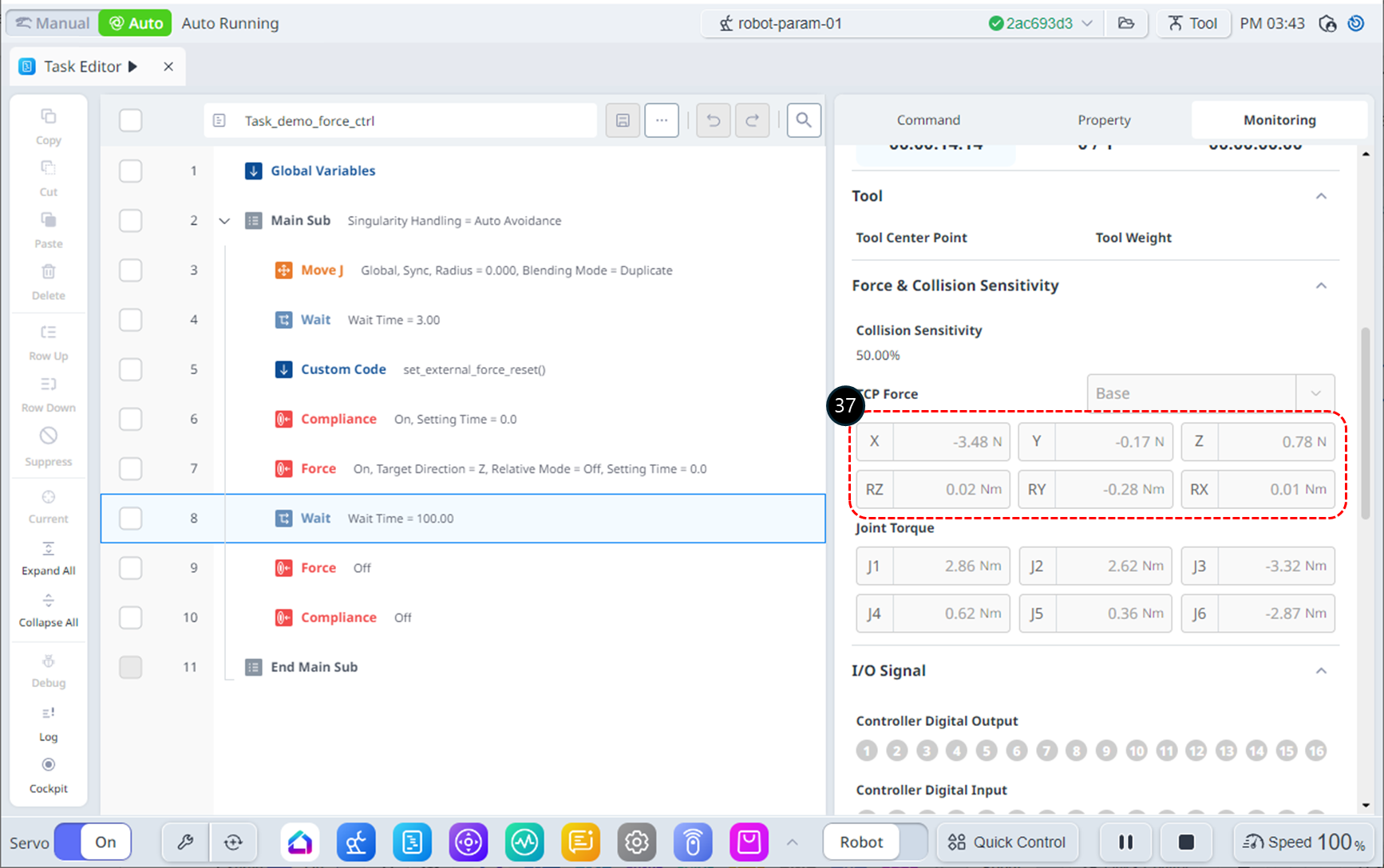
Během provozu můžete sledovat sílu TCP v reálném čase v sekci síla TCP na kartě Monitoring. Pokud není na koncový efektor robota aplikována žádná síla, hodnoty síly TCP by měly být všechny 0, ale můžete si všimnout, že se zobrazují chybové komponenty. Níže je uvedeno další vysvětlení k řešení tohoto problému.
-
Klepnutím na tlačítko zastavit ukončíte úlohu.
-
Přepněte provozní režim do manuálního režimu pro změnu úlohy.
-
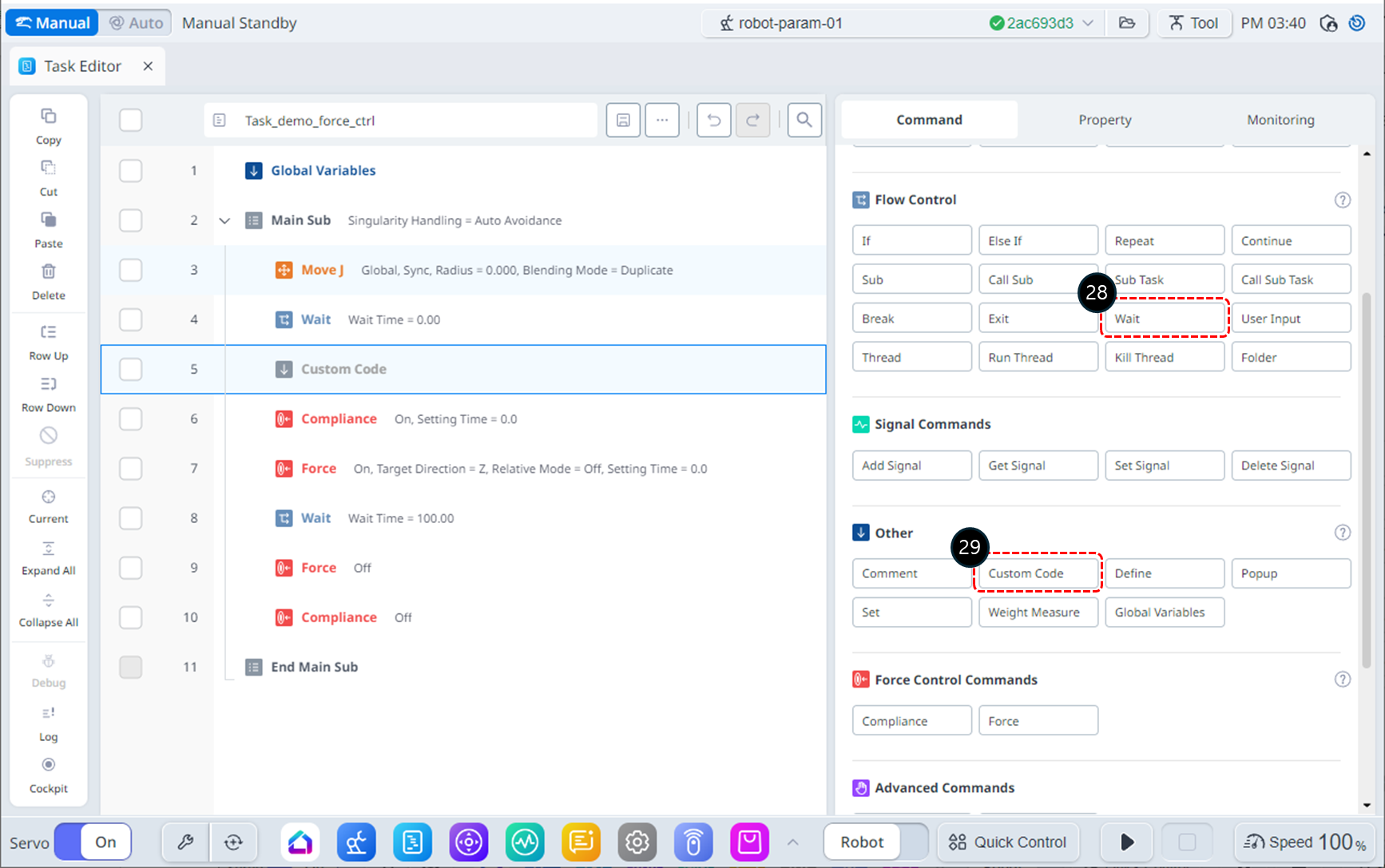
Vyberte kartu příkaz.
-
Do řádku 4 seznamu úkolů přidejte příkaz čekání.
-
Přidejte příkaz vlastní kód do řádku 5 seznamu úkolů.
-
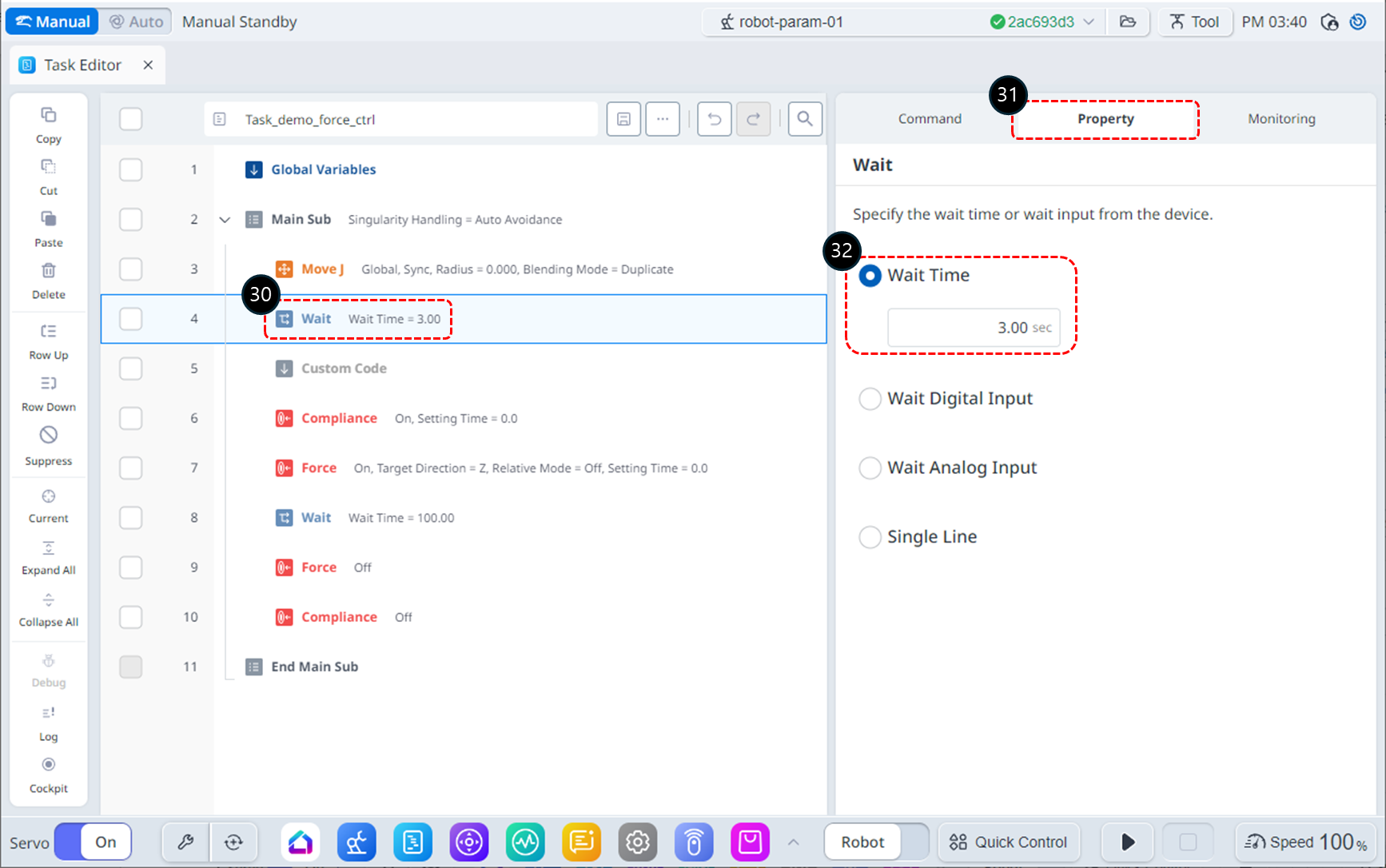
Vyberte příkaz čekání na řádku 4.
-
Vyberte kartu Vlastnosti.
-
Nastavte čekací dobu následujícím způsobem.
-
Čekací doba: 3 s
-
-
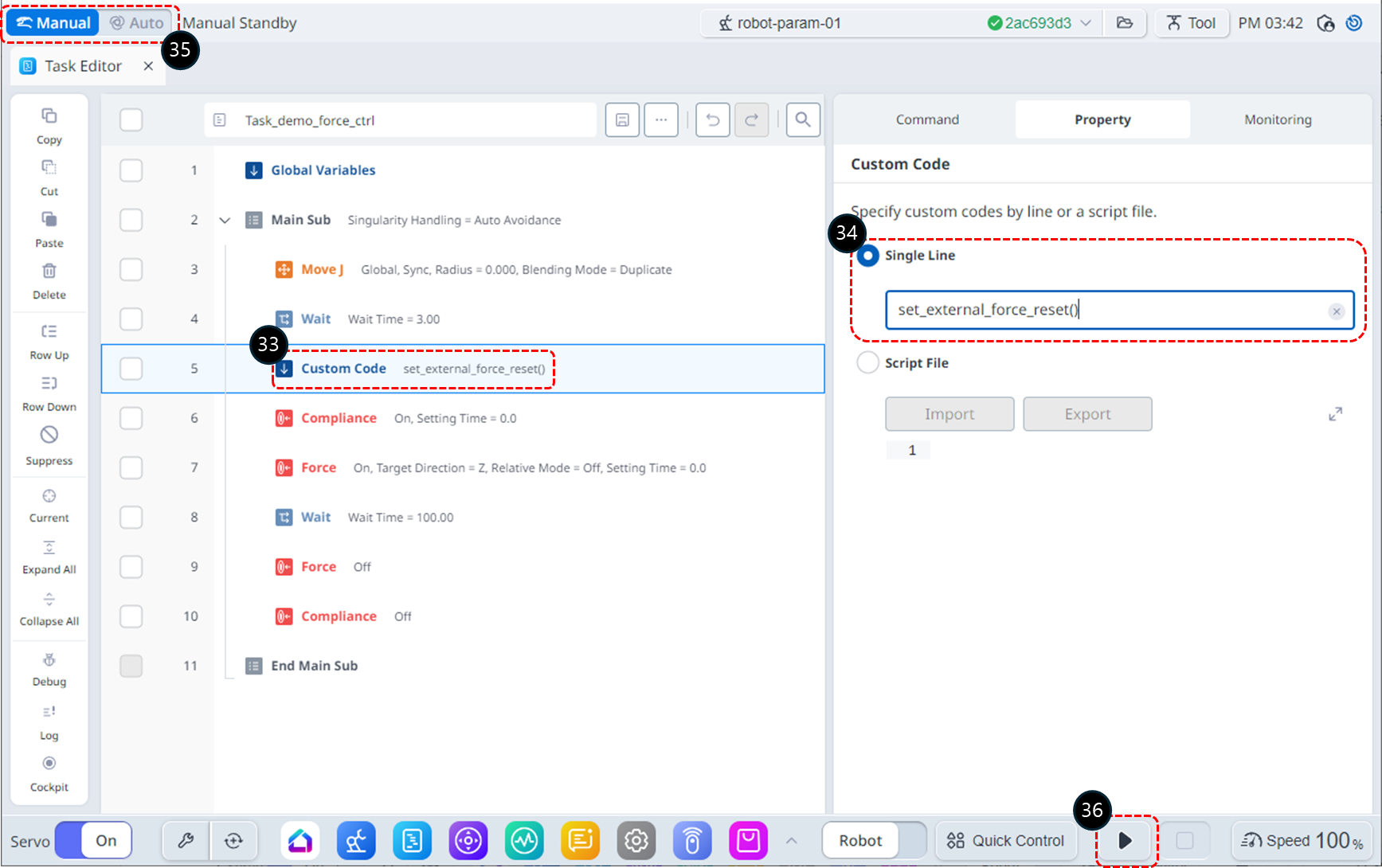
Vyberte příkaz vlastní kód na řádku 5.
-
Zvolte jeden řádek a přidejte následující příkaz DRL: Tento příkaz resetuje hodnoty externího snímače síly, aby se odstranily případné chyby.
-
set_external_force_reset()
-
-
Přepněte provozní režim do režimu Auto. Karta Vlastnosti se automaticky přepne na kartu monitorování.
-
Klepněte na tlačítko Spustit.
-
Na kartě Monitoring zkontrolujte hodnoty síly TCP. Před použitím příkazu set_external_Force_RESET() si všimnete, že chyba byla snížena.