Upevnění robota
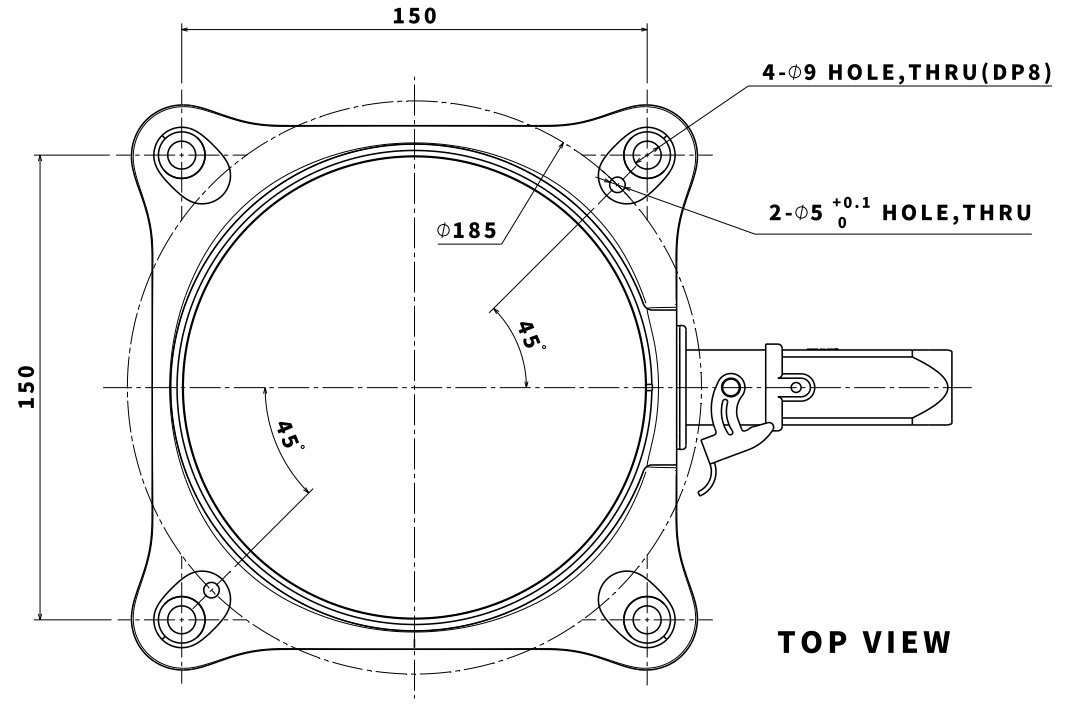
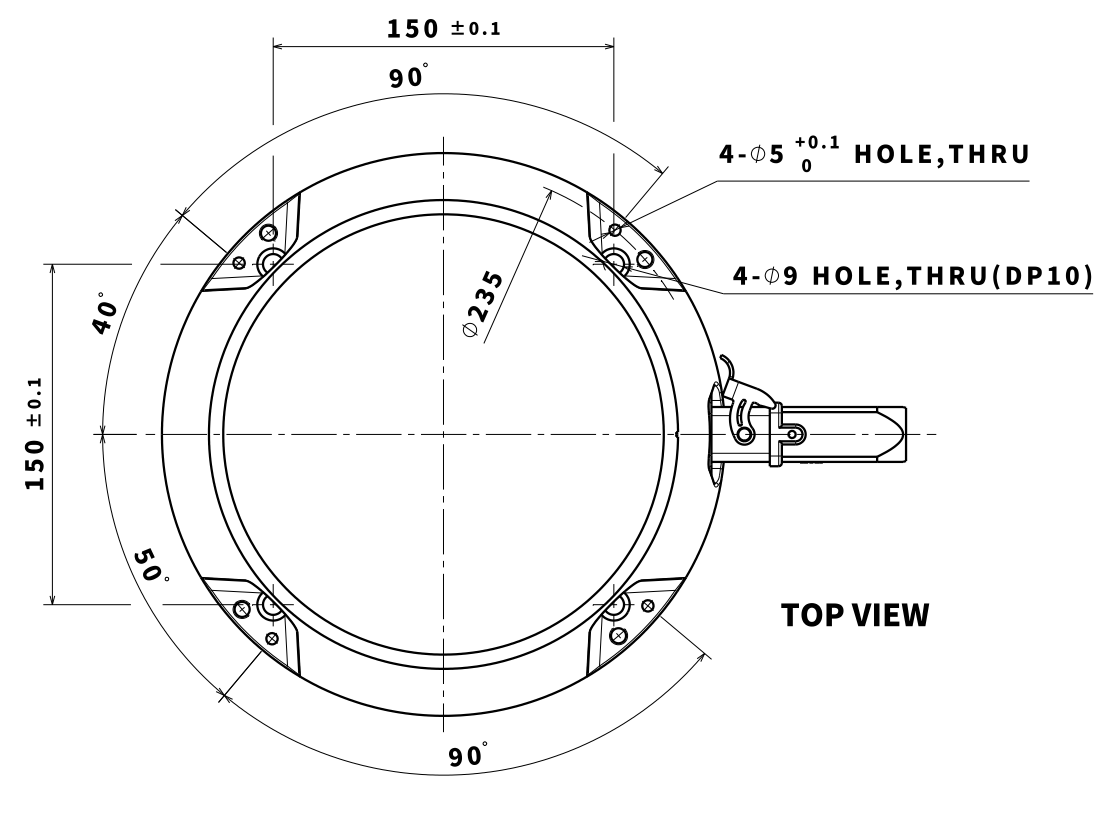
K upevnění robota použijte šrouby M8 ve čtyřech otvorech 9,0 mm na základně manipulátoru.
-
Pro utažení šroubů se doporučuje použít utahovací moment 20 Nm. Použijte podložky (pružinové ploché), abyste zabránili uvolnění vibracemi.
-
Pomocí dvou kolíků znamenáku o průměru 5 umístěte robota přesně na pevné místo.
Používá se výkres základny manipulátoru a čtyři šrouby M8 (řada M). Jednotka [mm]
Používá se výkres základny manipulátoru a čtyři šrouby M8 (řada H), jednotka [mm]
Varování
-
Utáhněte šrouby až na doraz, aby se zabránilo uvolnění během manipulace.
-
Namontujte základnu manipulátoru na pevný povrch, který odolá zatížení generovaným během provozu (10násobek maximálního točivého momentu a pětinásobek hmotnosti robota).
-
Robot interpretuje vibrace základny manipulátoru jako kolizi a aktivuje nouzové zastavení. Proto v případě umístění instalace, která automaticky řadí polohu, neinstalujte základnu robota na místo s vysokou akcelerací pohybu.
-
Namontujte rameno manipulátoru na konkrétní místo pomocí vhodných metod. Montážní plocha musí být pevná.
-
Manipulátor bude poškozen, pokud se dostane do kontaktu s vodou po delší dobu. Neprovozujte robota v podmínkách, kdy může být mokrý nebo pod vodou.
Umístění kabelu
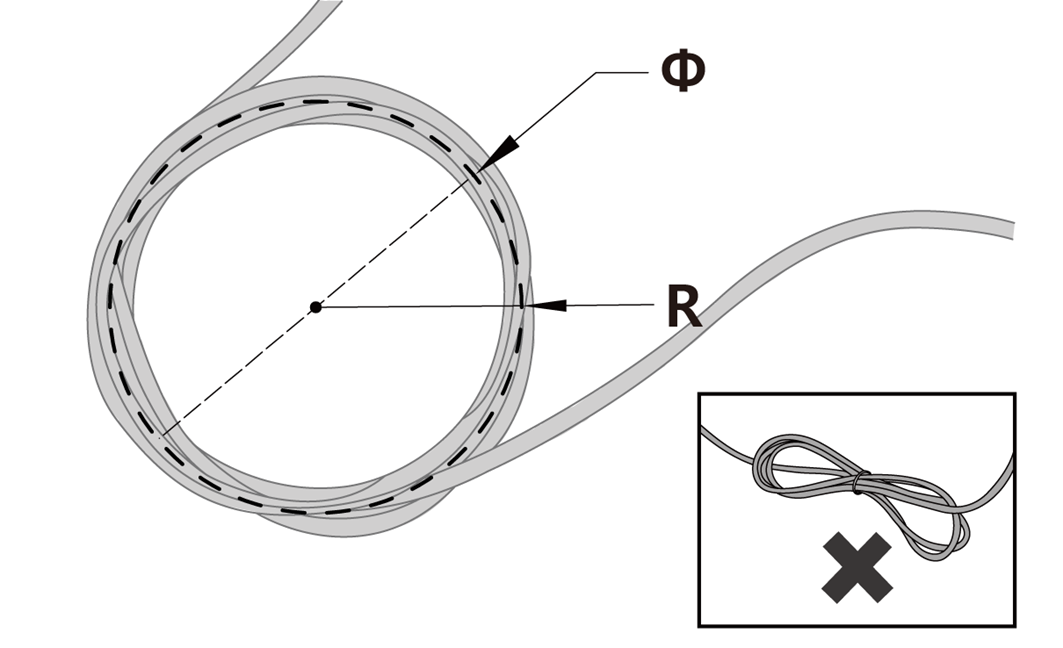
Ujistěte se, že kabely mají zakřivení větší než minimální poloměr zakřivení. Minimální poloměr zakřivení každého kabelu je následující:
|
Kabel |
Minimální poloměr zakřivení (R) |
|---|---|
|
Kabel závěsného zařízení Teach |
120 mm |
|
Kabel robota |
120 mm |
Upozornění
-
Zkontrolujte, zda je poloměr zakřivení mezi závěsným kabelem Teach a závěsným konektorem Teach větší než minimální poloměr zakřivení.
-
Pokud je poloměr zakřivení menší než minimální poloměr zakřivení, může dojít k odpojení kabelu nebo poškození produktu.
-
V prostředích, kde může dojít k elektromagnetickému hluku, je třeba provést správnou instalaci kabelu, aby se zabránilo poruchám.