Představení produktu (CS-12P)
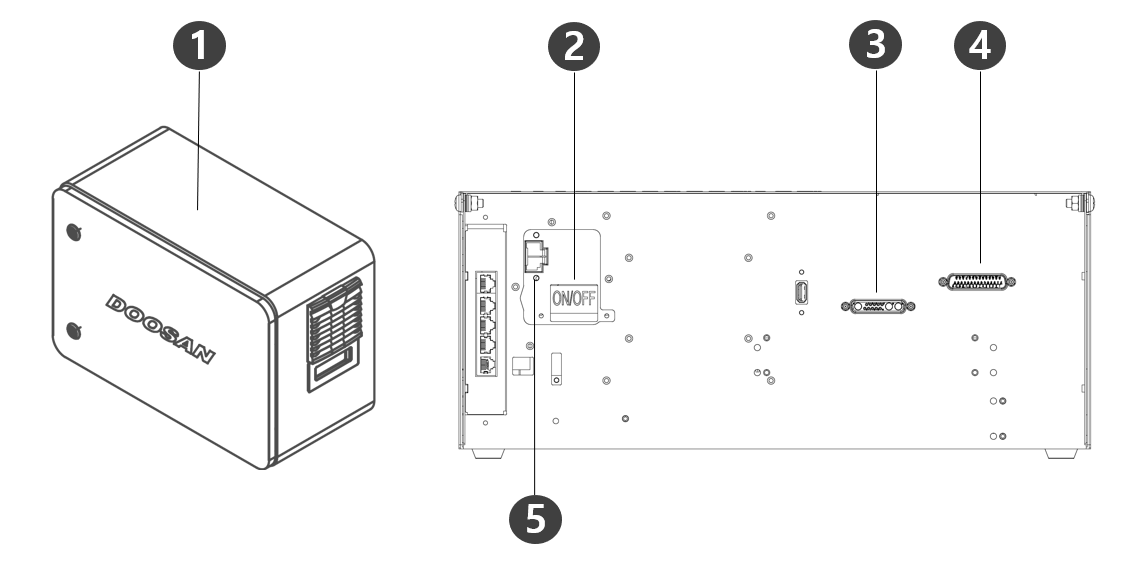
Název jednotlivých částí a funkcí
|
No. |
Položky |
Popis |
|
1 |
Konektor i /o (vnitřní) |
Může být připojen k řídicím jednotkám nebo periferním zařízením jiných robotů. |
|
2 |
Spínač napájení |
Slouží k ZAPNUTÍ/VYPNUTÍ hlavního napájení řídicí jednotky . |
|
3 |
Připojte svorku závěsného kabelu |
Používá se pro připojení závěsného kabelu Teach k ovladači. |
|
4 |
připojovací svorka kabelu robota |
Slouží k připojení kabelu robota k ovladači. |
|
5 |
Svorka pro připojení napájení |
Slouží k připojení napájení řídicí jednotky. |
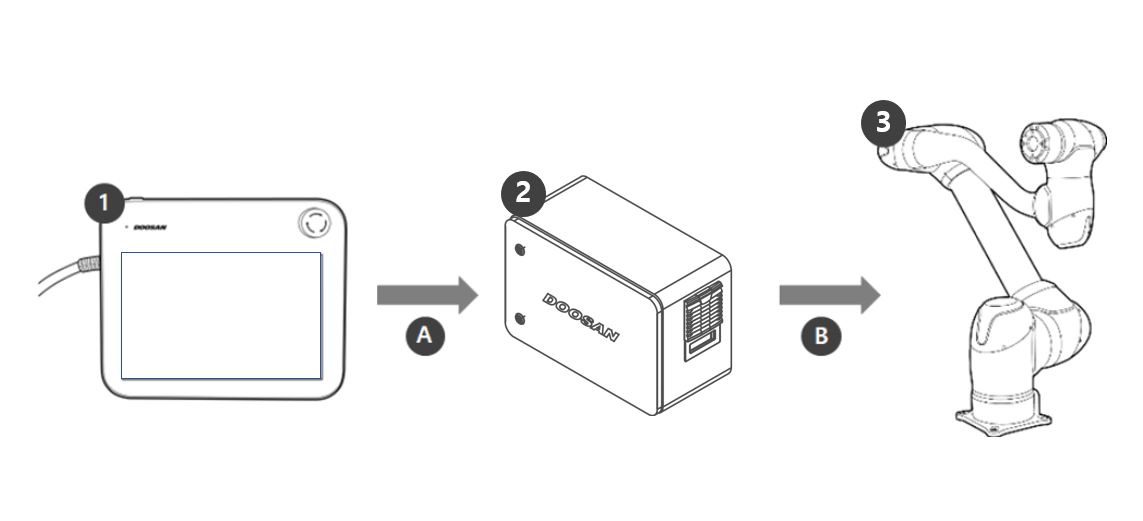
Konfigurace systému
|
No. |
Jméno |
Popis |
|---|---|---|
|
1 |
Vyučovat přívěsek |
Toto zařízení řídí celý systém a je schopno naučit robot specifické pozice nebo nastavení související s manipulátory a regulátory. |
|
2 |
Řídicí jednotka |
Ovládá pohyb robota podle pozice nebo pohybu nastaveného přívěskem učení. Obsahuje různé i /o porty, které umožňují připojení a použití různých zařízení a zařízení. |
|
3 |
Manipulátor |
Jedná se o průmyslový kolaborativní robot, který může provádět přepravní nebo montážní úkoly s různými nástroji. |
|
A |
Příkaz/monitorování |
|
|
B |
Napájení/síť |
|
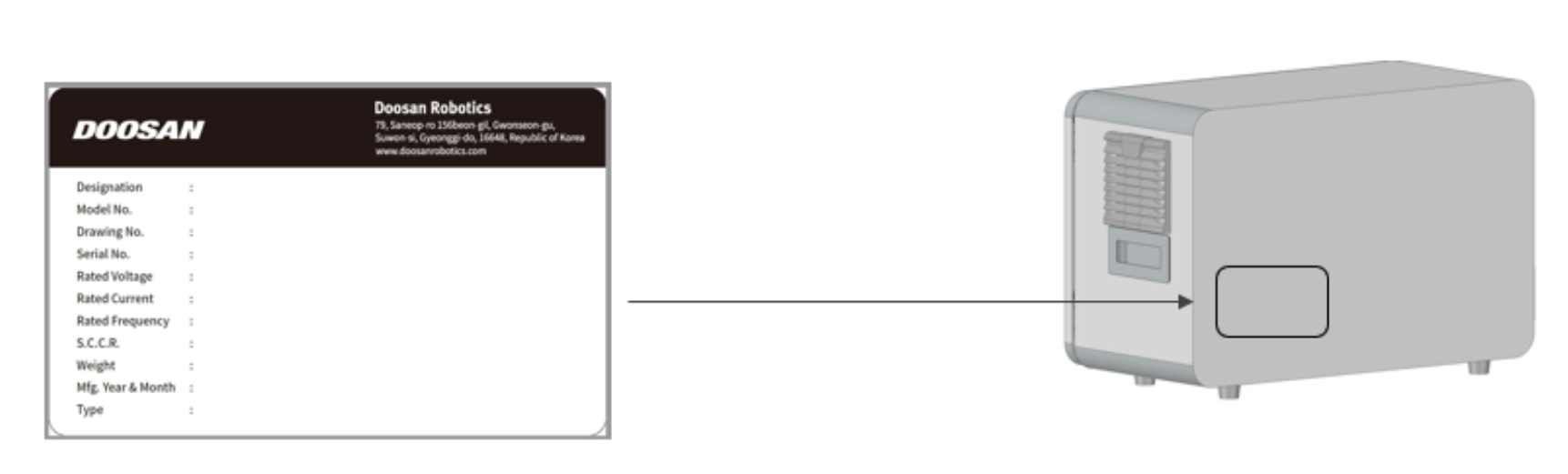
Štítek a štítek
Instalace (CS-12P)
Upozornění během instalace
Upozornění
-
Před instalací řídicí jednotky zajistěte dostatečný prostor. Pokud není zajištěn dostatečný prostor, může dojít k poškození řídicí jednotky nebo může dojít k nedostatku manipulátoru nebo závěsného kabelu Teach.
-
Při připojování napájení k produktu zkontrolujte vstupní napájení. Pokud se napájecí zdroj připojeného vstupu liší od jmenovitého napájecího vstupu (22-60VDC), výrobek nepracuje správně nebo může být poškozen řídicí jednotka.
Instalační prostředí
Při instalaci ovladače zvažte následující.
-
Před instalací řídicí jednotky zajistěte dostatečný prostor.
-
Řídicí jednotka musí být upevněna.
-
Ujistěte se, že v mobilním vozidle není upevněna žádná součást.
Instalace hardwaru
Před uvedením manipulátoru do provozu nainstalujte robota, ovladač a ovládací prvek učení, klíčové součásti systému a napájte je. Pokyny pro instalaci jednotlivých prvků jsou následující:
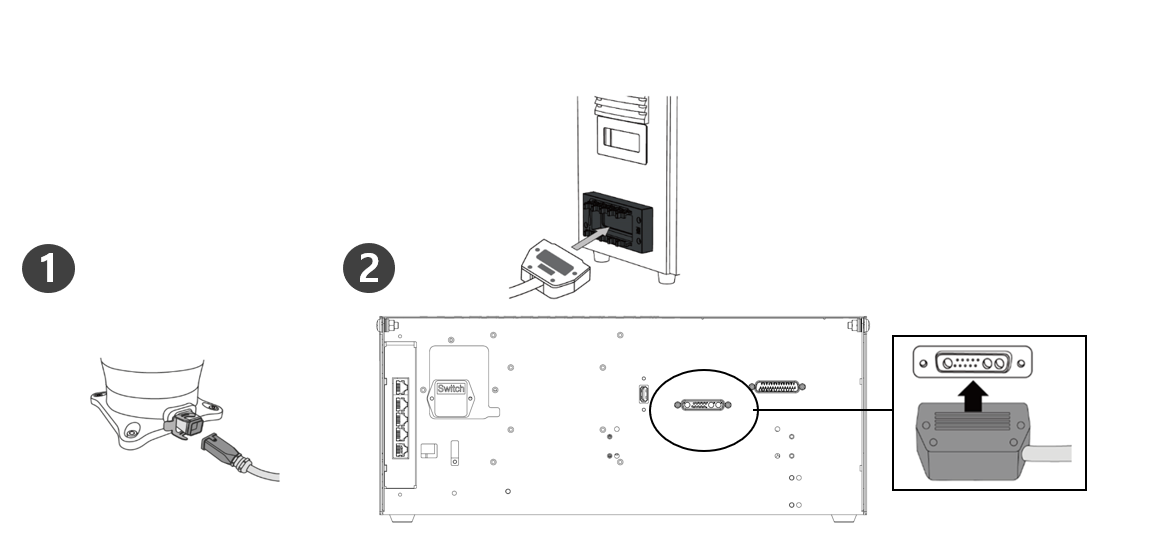
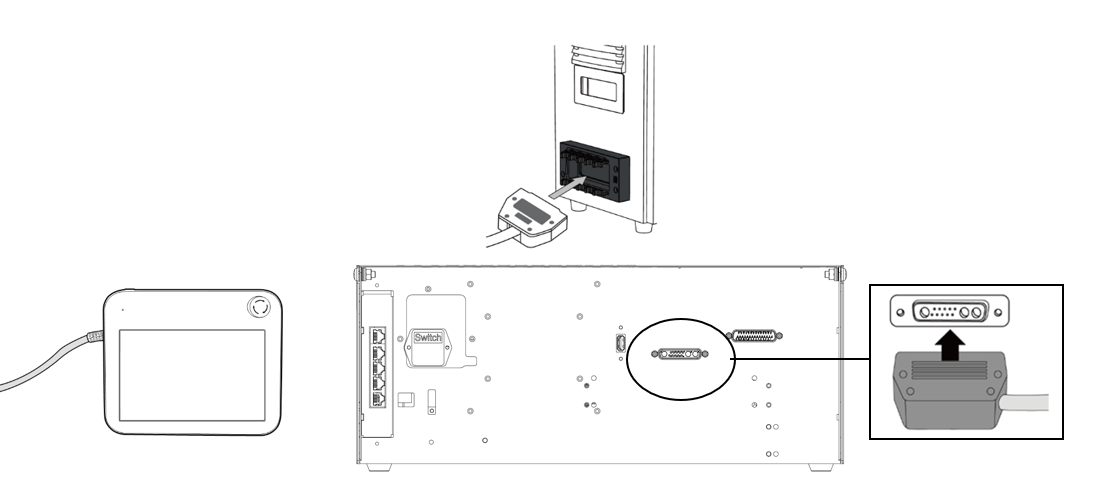
Připojení manipulátoru k řídicí jednotce
|
|
Popis |
|---|---|
|
1 |
Připojte kabel manipulátoru k ovladači a umístěte pojistný kroužek
|
|
2 |
Připojení opačného konce připojovacího kabelu manipulátoru k řídicí jednotce
|
Upozornění
-
Neodpojujte kabel manipulátoru, když je robot zapnutý. To může způsobit poruchu robota.
-
Nepokoušejte se o žádné úpravy nebo rozšíření kabelu manipulátoru.
-
Při instalaci ovladače na podlahu zajistěte na každé straně alespoň 50 mm vůle, aby bylo zajištěno dostatečné větrání.
-
Před zapnutím řídicí jednotky se ujistěte, že konektory řádně uzamknete.
Poznámka
-
Při konfiguraci systému se doporučuje instalovat reduktor hluku, aby se zabránilo hlukovým účinkům a poruše systému.
-
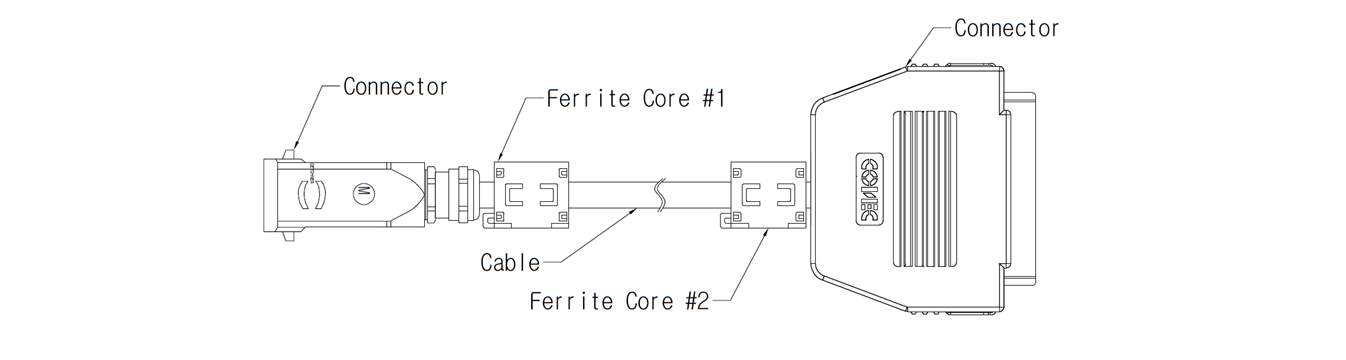
Pokud je regulátor ovlivněn hlukem generovaným elektromagnetickými vlnami, je nutné nainstalovat feritové jádro, aby byl zajištěn normální provoz. Umístění instalace je následující:
Připojte ovladač k učení Přívěsek
Připojte kabel závěsného zařízení Teach k odpovídajícím přípojkám na řadiči, dokud nezapadne, a ujistěte se, že je kabel pevně zapojen.
Upozornění
-
Při připojování kabelu před připojením zkontrolujte tvar spoje, aby se kolík neohýbal.
-
Pokud je závěsný kryt Teach používán zavěšením na mobilním vozidle nebo na ovladači, dejte pozor, abyste se nepřipojovali ke spojovacím kabelům.
-
Dejte pozor, abyste neumožnili kontaktu s vodou řídicí jednotce, učili závěsný kryt a kabel.
-
Neinstalujte ovladač a neučte přívěsek v prašném nebo vlhkém prostředí.
-
Regulátory a inteligentní přívěsek nesmí být nikdy vystaveny prachu prostředí nad stupněm krytí IP20. Buďte obzvláště opatrní v prostředí s vodivým prachem.
Poznámka
-
Při konfiguraci systému se doporučuje instalovat reduktor hluku, aby se zabránilo hlukovým účinkům a poruše systému.
-
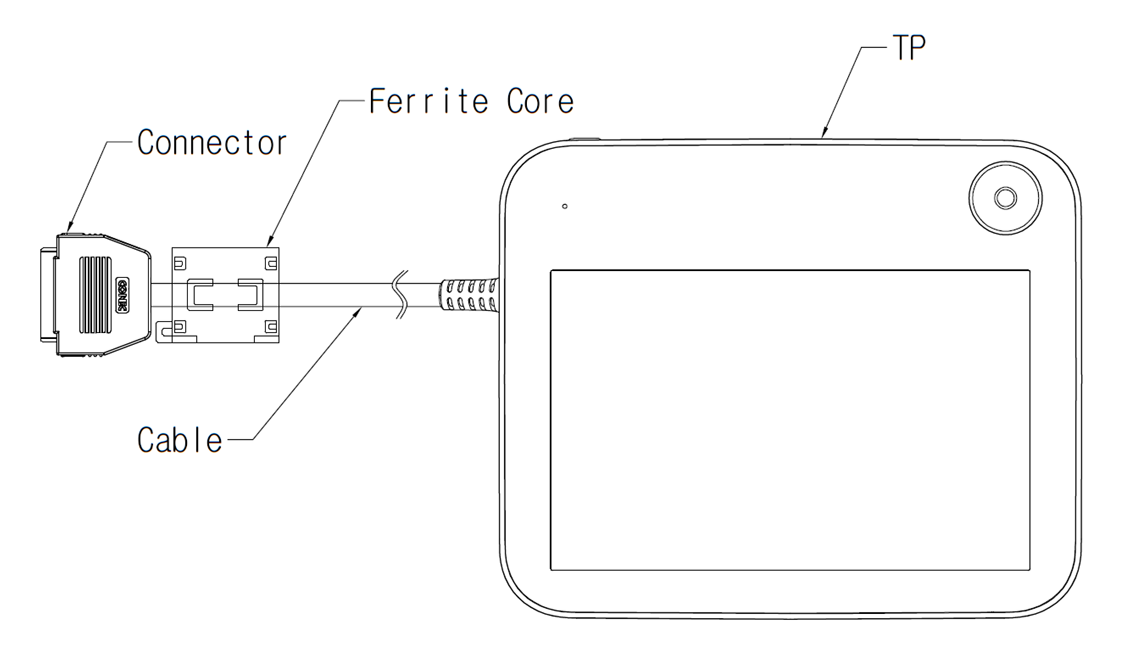
Pokud je závěsný kryt učení ovlivněn hlukem generovaným elektromagnetickými vlnami, je nutné nainstalovat feritové jádro, aby byl zajištěn normální provoz. Umístění instalace je následující:
Umístění kabelu manipulátoru a závěsného kabelu učení
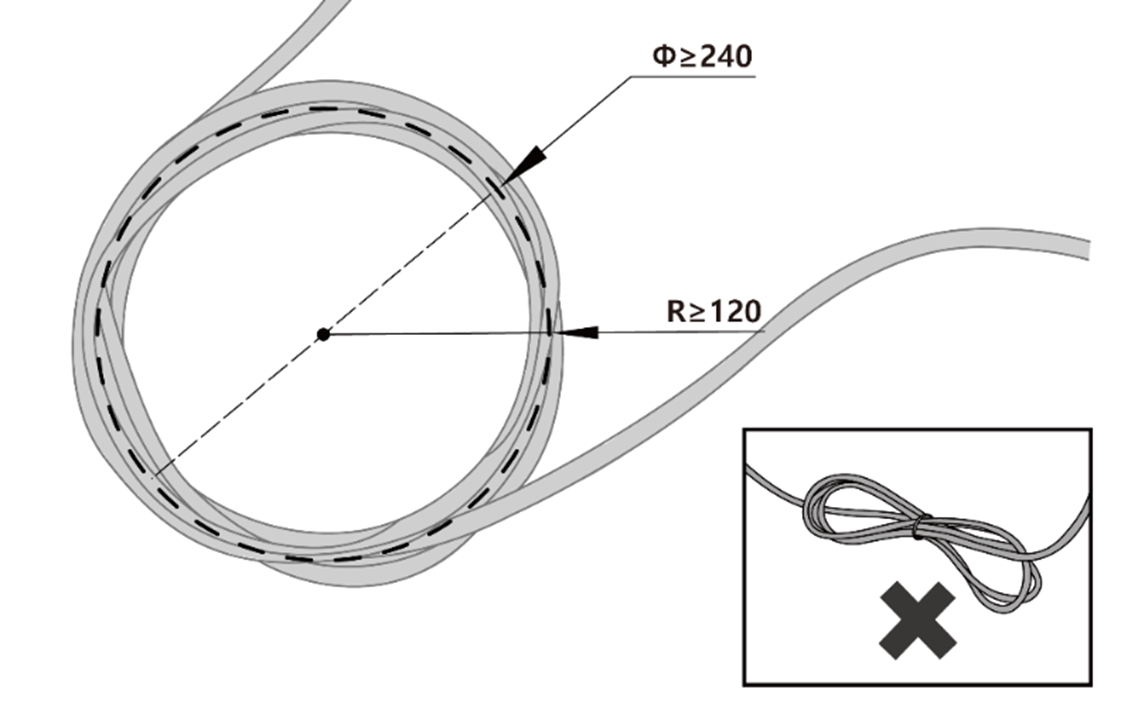
Zkontrolujte, zda je poloměr zakřivení závěsného kabelu manipulátoru a učení větší než minimální poloměr zakřivení (120 mm).
Upozornění
-
Zkontrolujte, zda je poloměr zakřivení mezi závěsným kabelem Teach a závěsným konektorem Teach větší než minimální poloměr zakřivení (120 mm).
-
Pokud je poloměr zakřivení menší než minimální poloměr zakřivení (120 mm), může dojít k odpojení kabelu nebo poškození produktu.
-
V prostředích, kde může dojít k elektromagnetickému hluku, je třeba provést správnou instalaci kabelu, aby se zabránilo poruchám.
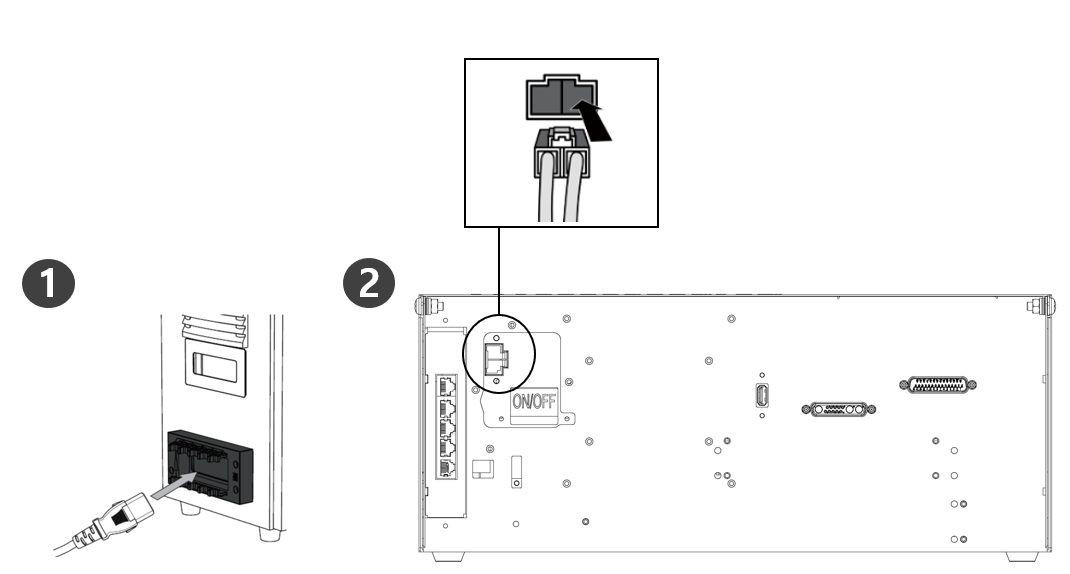
Připojení napájení k ovladači
Připojte napájecí kabel k odpovídajícím přípojkám na řadiči, dokud nezapadne, a ujistěte se, že je kabel pevně zapojen.
Varování
-
Po připojení napájecích kabelů (elektrické ukostření) se ujistěte, že je robot správně uzemněn. Vytvořte společnou kostru pro všechna zařízení v systému s nepoužitými šrouby vztajícími se ke symbolu uzemnění uvnitř řídicí jednotky. Zemnicí vodič musí splňovat maximální jmenovitý proud systému.
-
Ochraňte vstupní napájení řídicí jednotky pomocí zařízení, jako je jistič.
-
Kabel robota neupravujte ani neprodlužujte. Může způsobit požár nebo poruchu řídicí jednotky.
-
Před napájením řídicí jednotky se ujistěte, že jsou všechny kabely správně připojeny. Vždy používejte originální kabel, který je součástí balení produktu.
-
Dávejte pozor, abyste nepřipojoval polaritu vstupního napětí nesprávně.
Poznámka
-
Při konfiguraci systému se doporučuje nainstalovat vypínač schopný vypnout všechna zařízení najednou.
-
Při použití regulátoru pro stejnosměrný proud může být pohyb robota omezen v závislosti na zatížení a pohybu.
-
Pokud je vstupní napětí nižší než 48 v , může být pohyb robota omezen podle zatížení a pohybu.
-
Napájecí zdroj musí splňovat minimální požadavky, jako jsou zemní a jističe. Elektrické specifikace jsou následující:
|
Parametr |
Specifikace |
|
Vstupní napětí |
22–60 V DC |
|
Jmenovitý vstupní proud |
30 A |