Seznam součástí
|
|
|
Manipulátor |
Řídicí jednotka (volitelně (viz dodatek) |
|
|
|
Vyučovat přívěsek |
Napájecí kabel řídicí jednotky |

|
|
|
Připojovací kabel manipulátoru |
Uživatelská příručka / stručná příručka |
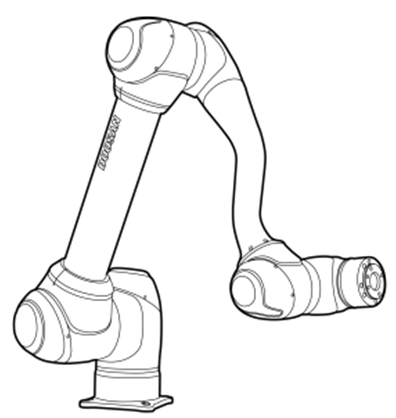
Název jednotlivých částí a funkcí
Manipulátor
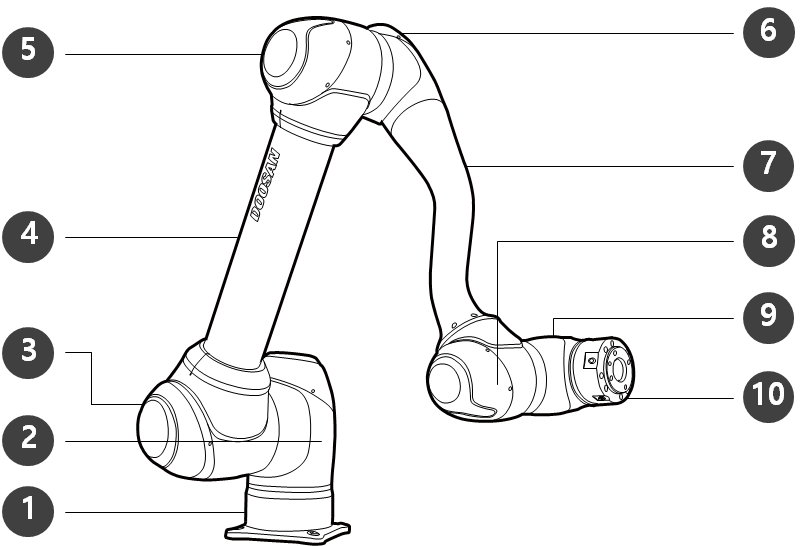
Název každé části
|
No. |
Jméno |
No. |
Jméno |
|---|---|---|---|
|
1 |
Základ |
6 |
J4 |
|
2 |
J1 |
7 |
Táhlo 2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Táhlo 1 |
9 |
J6 |
|
5 |
J3 |
10 |
Příruba nástroje |
(V
Klíčové vlastnosti
|
No. |
Položky |
Popis |
|---|---|---|
|
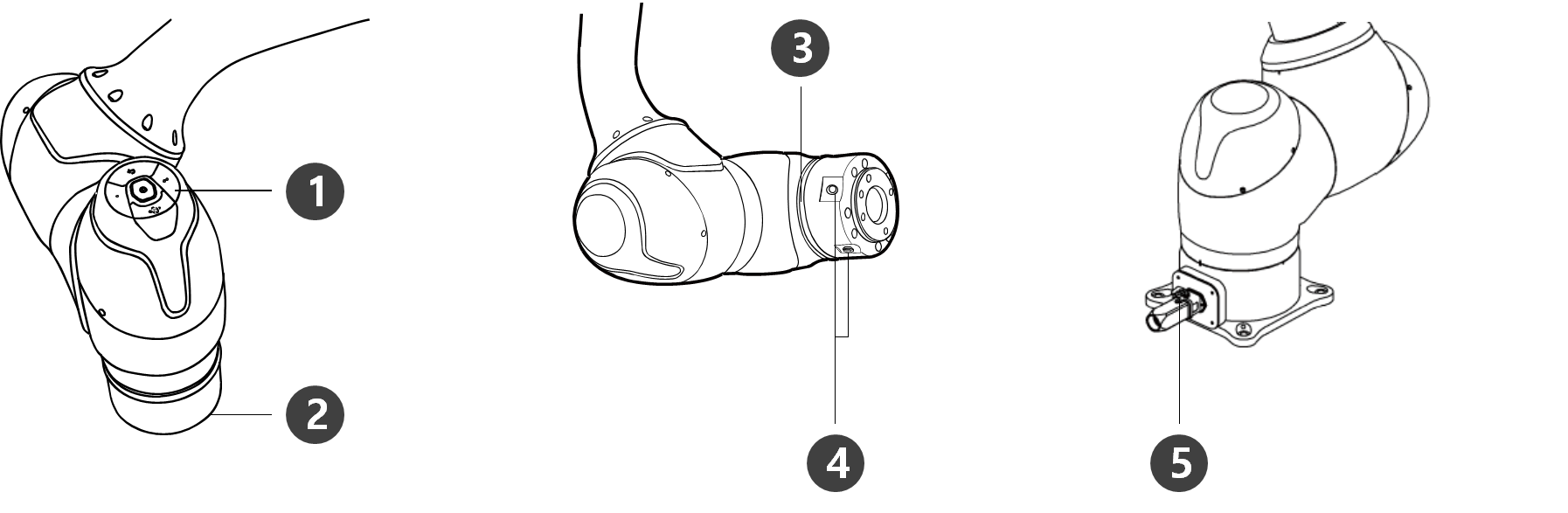
1 |
Kokpit |
[Nepovinné] ovládací tlačítka pro přímé učení a provoz |
|
2 |
Příruba nástroje |
Oblast pro instalaci nástrojů. |
|
3 |
3 |
Zobrazuje stav robota s různými barvami. Další informace o stavu robota naleznete v části Barva LED stavu a příruby pro každý režim. Verze: Řada H Řada H je dodávána s přídavnou LED diodou na 1 osách indikující stejný stav a barvu. |
|
4 |
Příruba i /o |
I/o port pro ovládání nástroje.
|
|
5 |
Konektor |
Používá se pro napájení a komunikaci robota. |
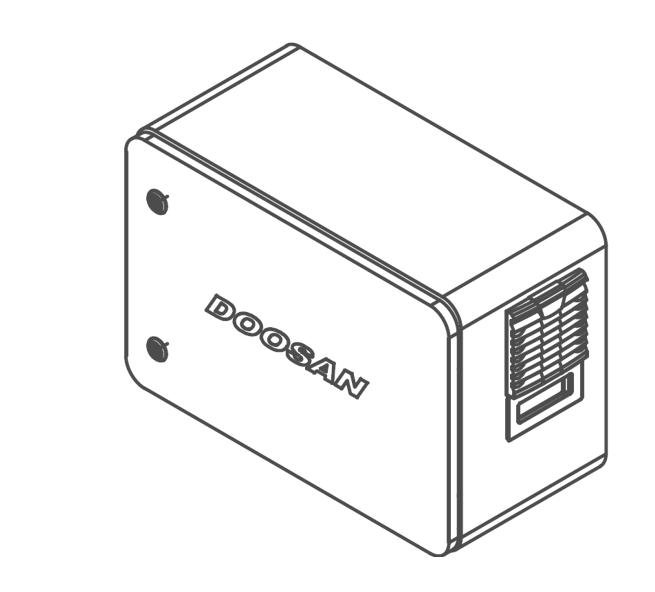
Řídicí jednotka
|
No. |
Položky |
Popis |
|---|---|---|
|
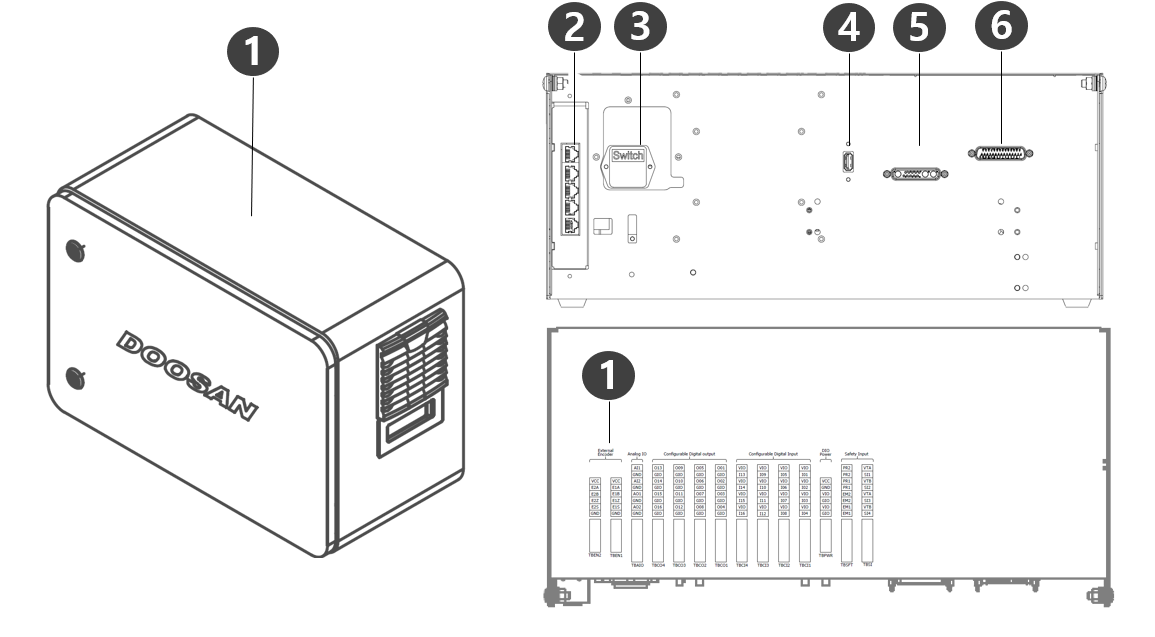
1 |
Konektor i /o (vnitřní) |
Může být připojen k řídicím jednotkám nebo periferním zařízením jiných robotů. |
|
2 |
Terminál pro připojení k síti |
Používá se pro připojení k terminálu síťového připojení uvnitř řadiče pro použití notebooků, zařízení TCP/IP a zařízení Modbus. |
|
3 |
Vývod/spínač připojení napájení |
Používá se pro připojení síťového napájení ovladače k jeho zapnutí nebo vypnutí. Další informace naleznete v části zapnutí/vypnutí systému. |
|
4 |
Konektor připojení USB |
Používá se k ukládání protokolů vytvořených během provozu robota v úložišti USB nebo k exportu a importu úloh. |
|
5 |
Připojovací svorka kabelu manipulátoru |
Používá se pro připojení kabelu manipulátoru k ovladači. |
|
6 |
Připojte svorku závěsného kabelu |
Používá se pro připojení závěsného kabelu Teach k ovladači. |
Poznámka
Pokud zvolíte volitelný ovladač, před použitím se před použitím podívejte do uživatelské příručky v příloze.
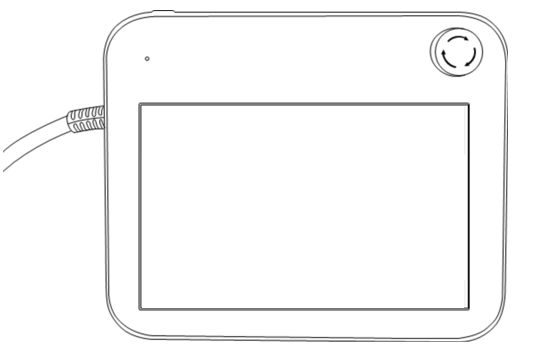
Vyučovat přívěsek
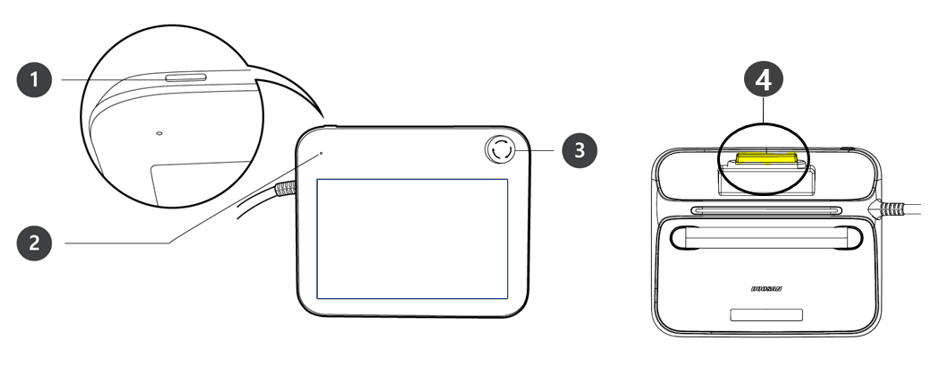
|
No. |
Položky |
Popis |
|---|---|---|
|
1 |
Tlačítko napájení |
|
|
2 |
Kontrolka LED napájení |
|
|
3 |
Tlačítko nouzového zastavení |
|
|
4 |
Tlačítko ručního navádění (3PE 3 polohový odpínač) |
|
Poznámka
-
Pokud je třeba závěsný kryt Teach během provozu chránit a namontovat, měkký kryt, který dodáváme, usnadňuje a usnadňuje používání.
-
Nová TP (TP-02) přidána funkce: Duální funkce ručního vedení
-
Stávající TP (TP-01) nelze použít v integrovaném řadiči. (Mapa kolíků byla změněna kvůli přepínači 3PE)
-
Nový TP (TP-02) lze použít ve stávajícím řadiči, ale LED se změní na jednu barvu (červenou) a zobrazí se a nelze použít další funkce.
-
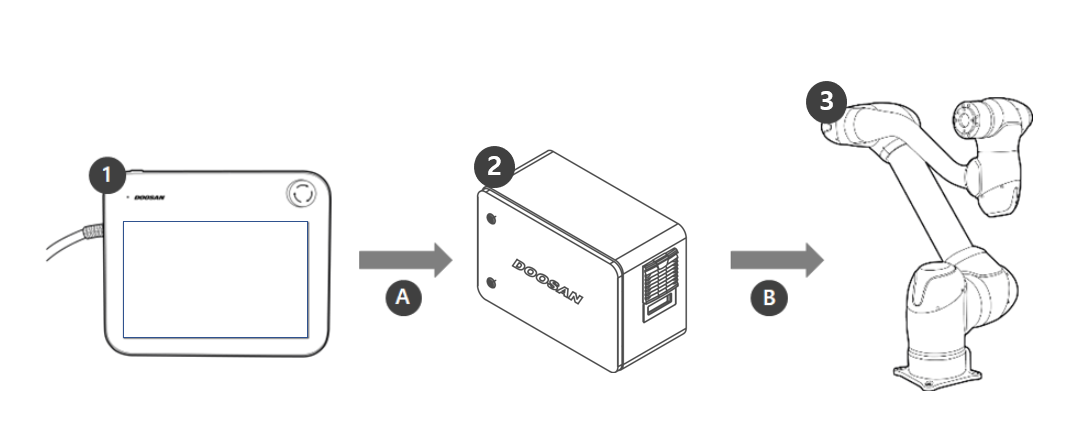
Konfigurace systému
|
No. |
Jméno |
Popis |
|---|---|---|
|
1 |
Vyučovat přívěsek |
Toto zařízení řídí celý systém a je schopno naučit robot specifické pozice nebo nastavení související s manipulátory a regulátory. |
|
2 |
Řídicí jednotka |
Ovládá pohyb robota podle pozice nebo pohybu nastaveného přívěskem učení. Obsahuje různé i /o porty, které umožňují připojení a použití různých zařízení a zařízení. |
|
3 |
Manipulátor |
Jedná se o průmyslový kolaborativní robot, který může provádět přepravní nebo montážní úkoly s různými nástroji. |
|
A |
Příkaz/monitorování |
|
|
B |
Napájení/síť |
|