Upozornění
Před zkoušením vzorku se ujistěte, že jste si přečetli a dodržujete bezpečnostní opatření. Další informace naleznete v ČÁSTI 1. Bezpečnostní příručka.
Poznámka
-
Pokud je při povolení nebo zakázání kontroly konformity překročena vnější hodnota točivého momentu, robot program zastaví kvůli chybě JTS (Joint Torque Sensor).
-
Změnu tuhosti lze provést bez ohledu na velikost vnějšího momentu.
-
Během kontroly dodržování předpisů nelze provádět společné pohyby, například příkaz MoveJ.
|
Prahová hodnota chyby JTS (Nm) |
||||||
|
Model |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
M1013 |
25 |
25 |
25 |
15 |
15 |
15 |
|
M0617 |
30 |
30 |
30 |
15 |
15 |
15 |
|
M0609 |
18 |
18 |
15 |
15 |
15 |
15 |
|
M1509 |
18 |
18 |
15 |
15 |
15 |
15 |
|
H2515 |
40 |
50 |
40 |
15 |
15 |
15 |
|
H2017 |
40 |
50 |
40 |
15 |
15 |
15 |
-
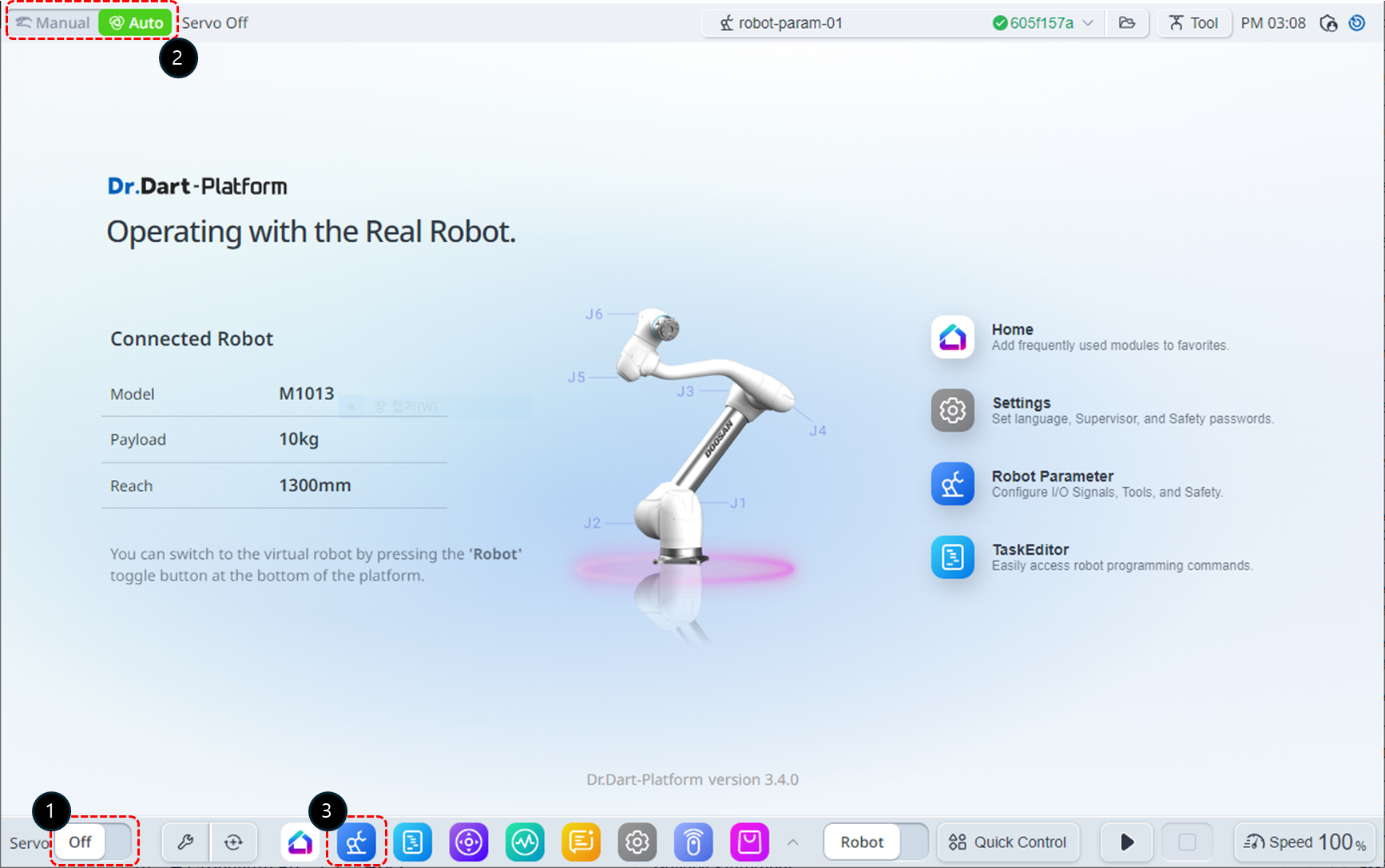
Změňte stav servomechanismu na Zapnuto.
-
Změňte provozní režim na Ruční.
-
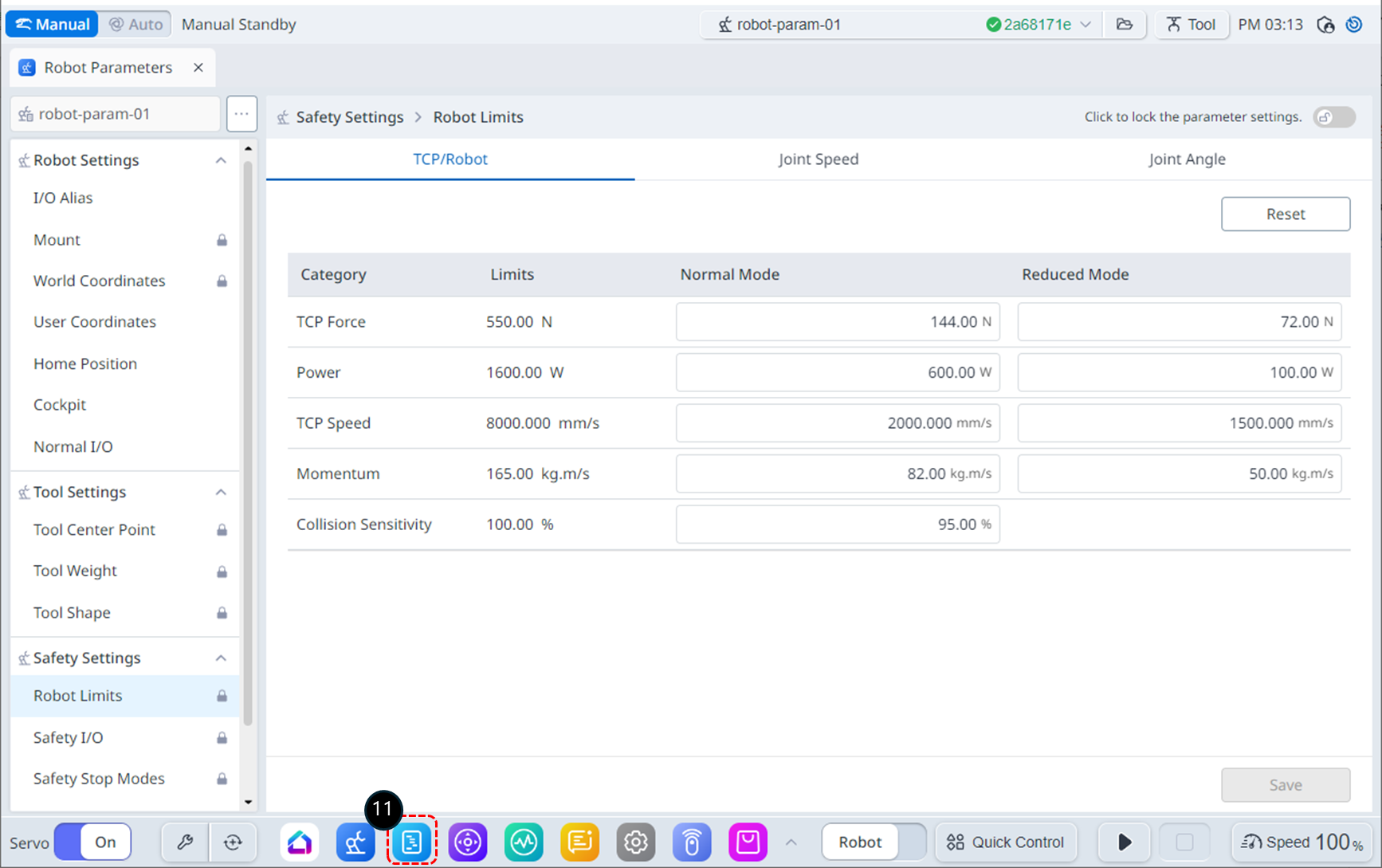
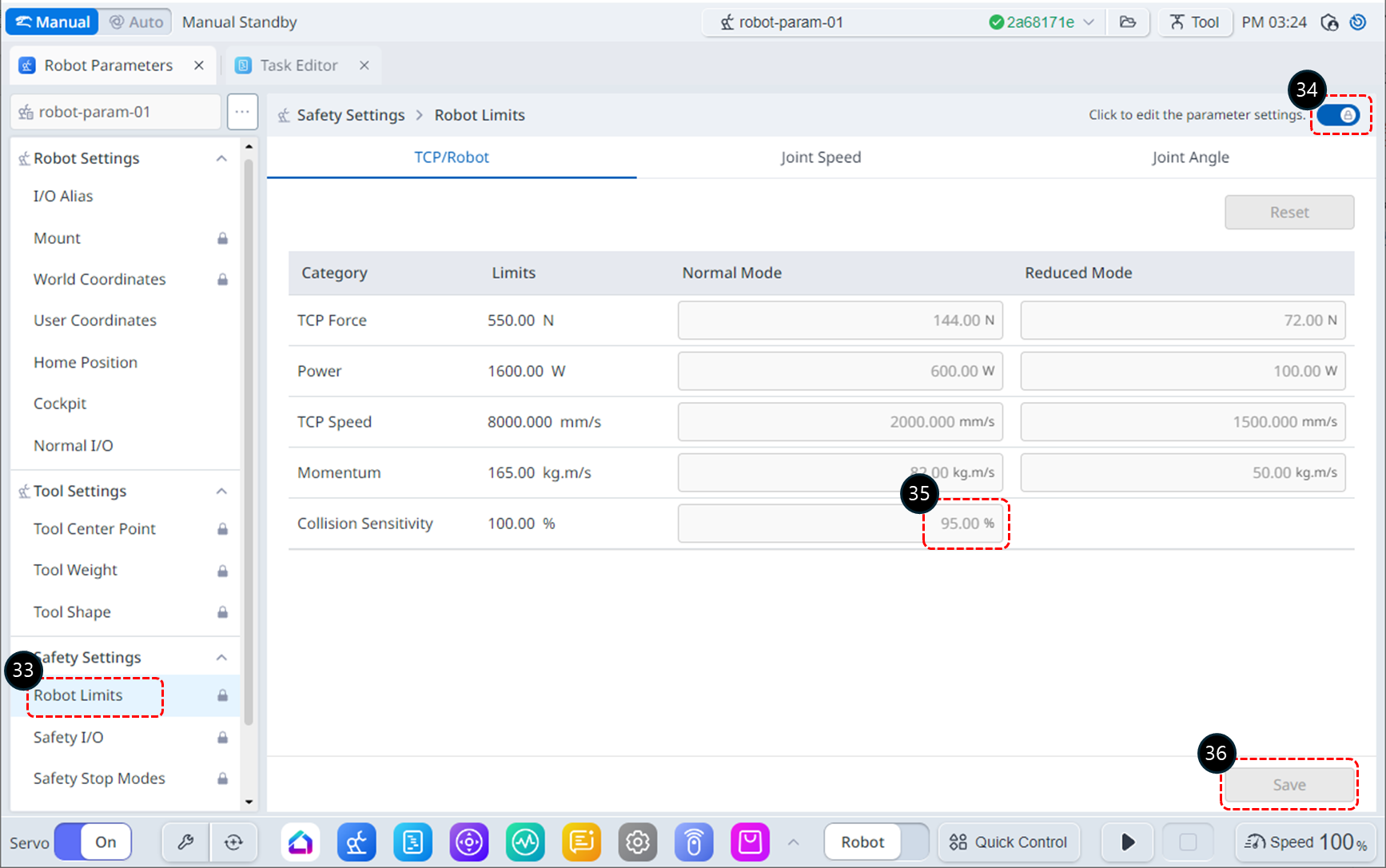
V dolní nabídce vyberte modul parametrů robota. V tomto příkladu je citlivost kolize nastavena na 95 %, aby se vysvětlil důvod snížení citlivosti kolize při použití kontroly dodržování předpisů.
-
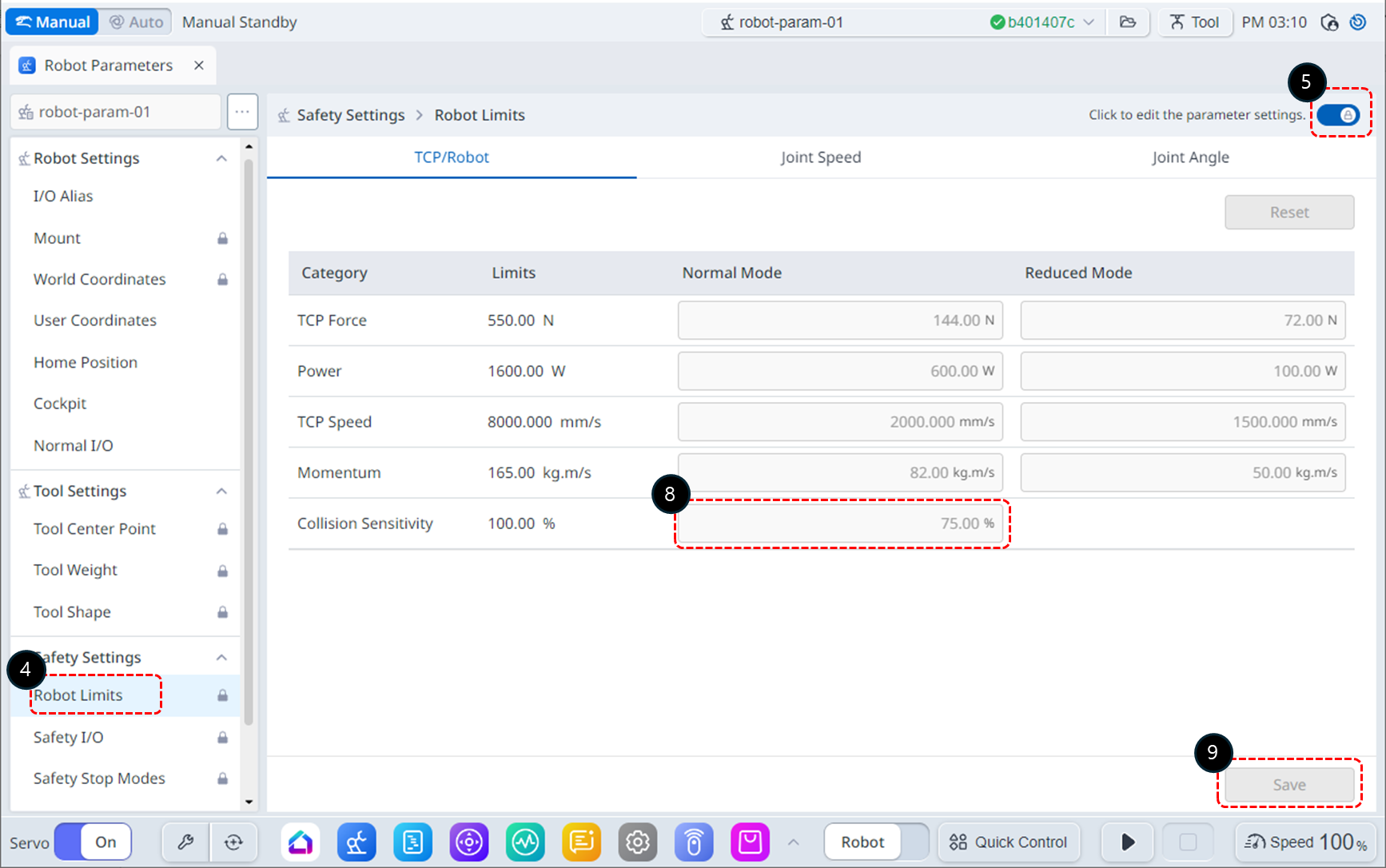
V Nastavení bezpečnosti vyberte limity robota.
-
Povolte stav úpravy parametrů.
-
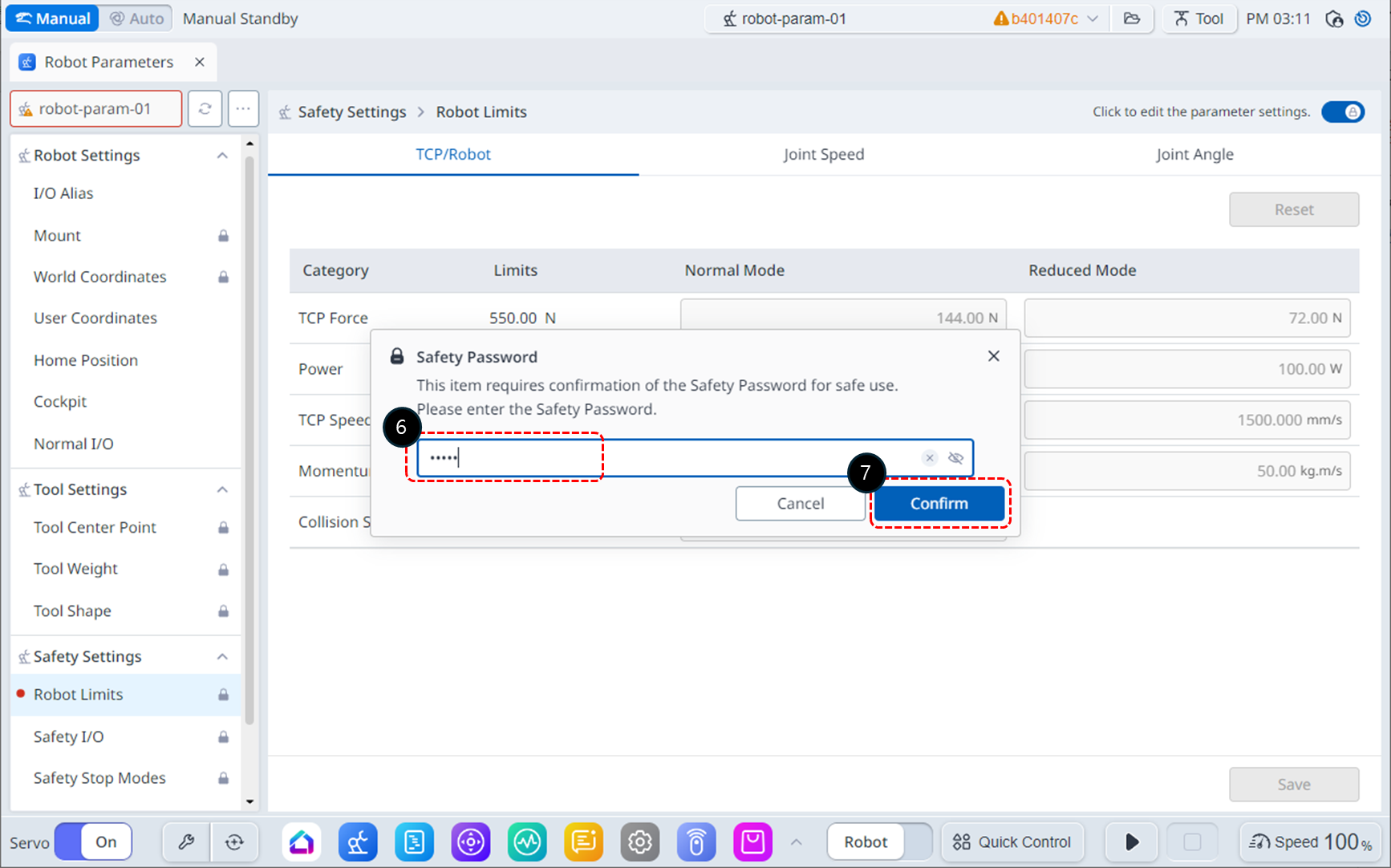
Pokud se zobrazí okno pro zadání hesla, zadejte bezpečnostní heslo (výchozí bezpečnostní heslo: Admin).
-
Klikněte na tlačítko potvrdit.
-
Upravte citlivost kolize na 95 %.
-
Klepnutím na tlačítko Uložit uložte nastavení.
-
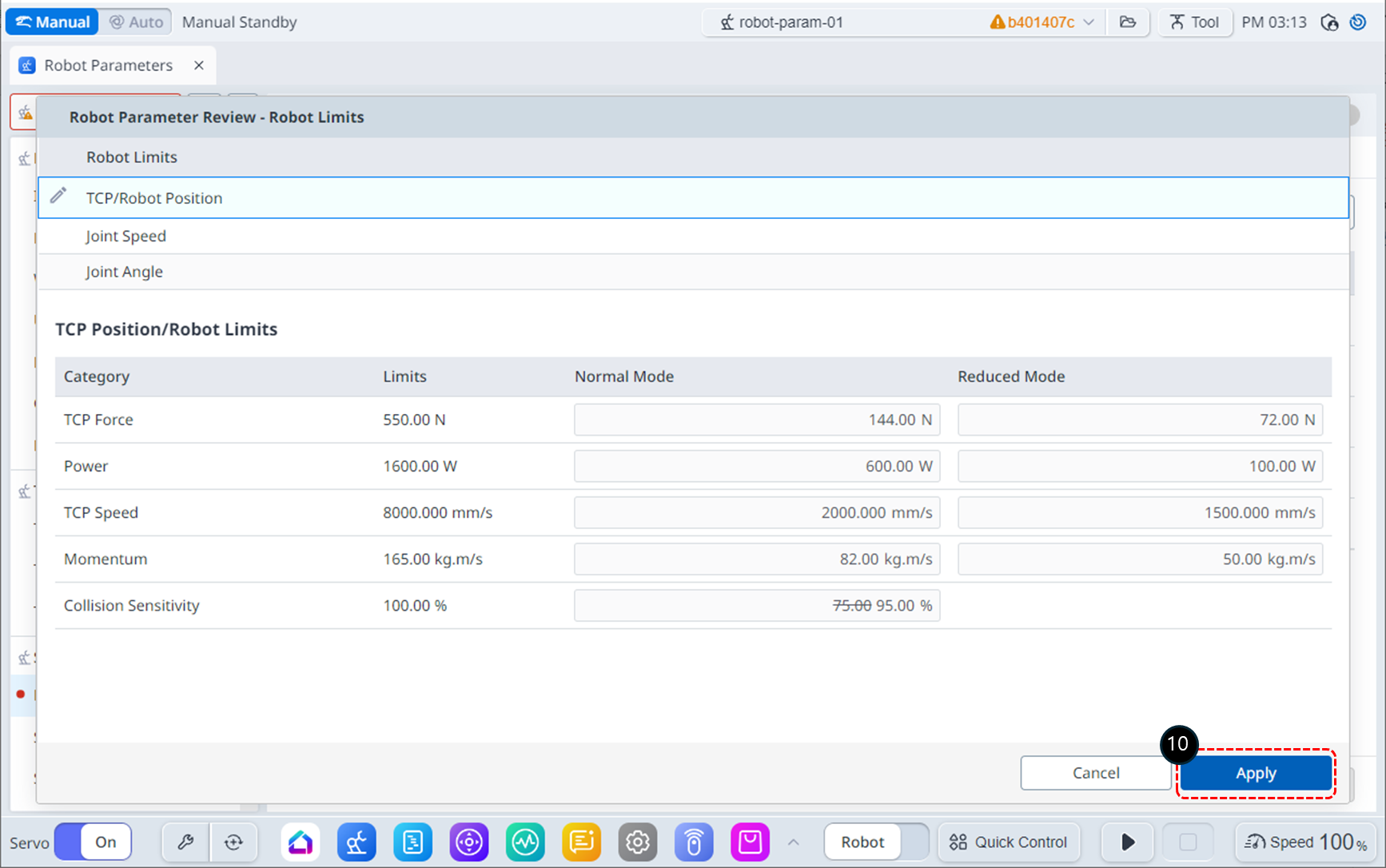
Po kontrole změn klikněte na tlačítko použít.
-
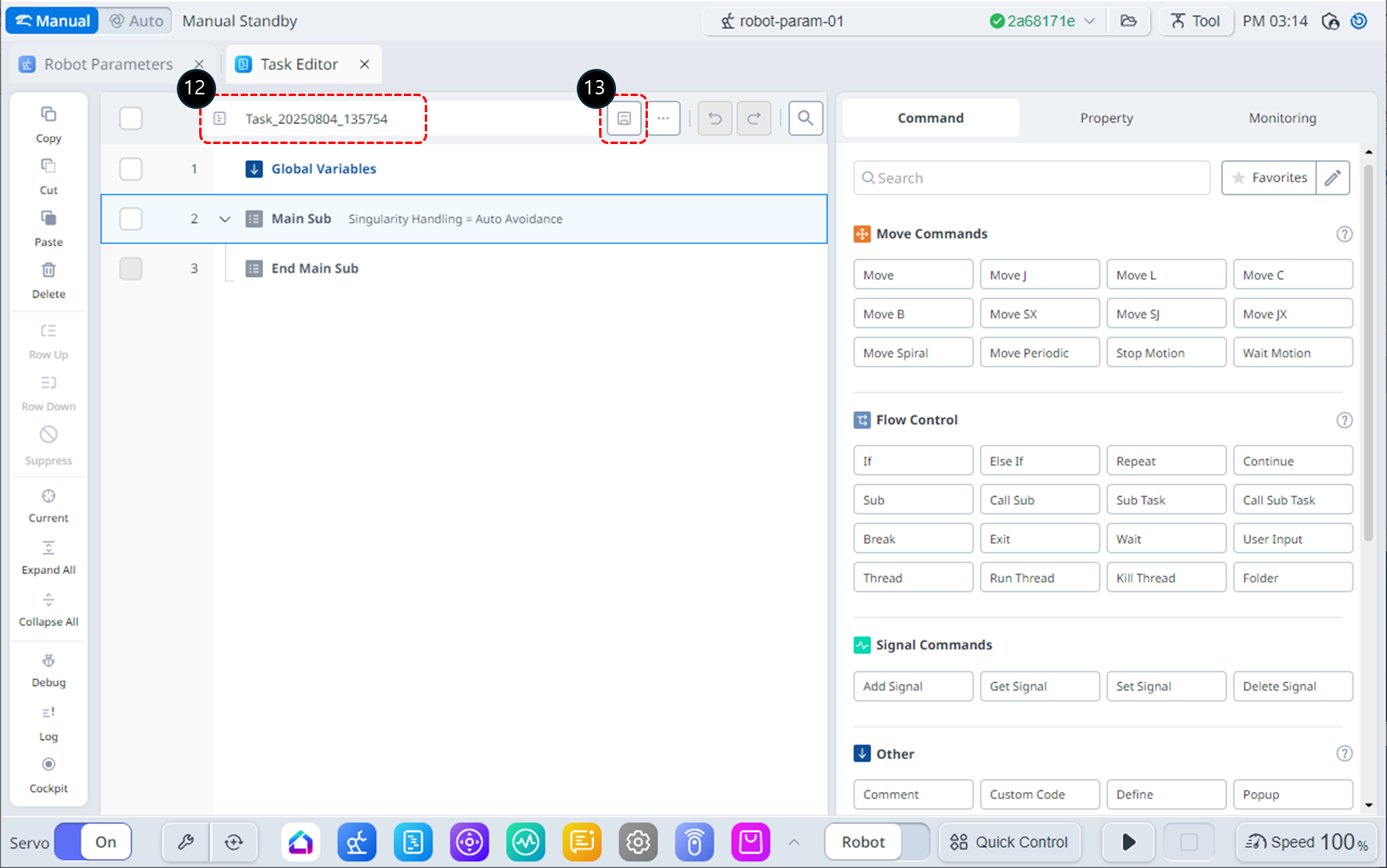
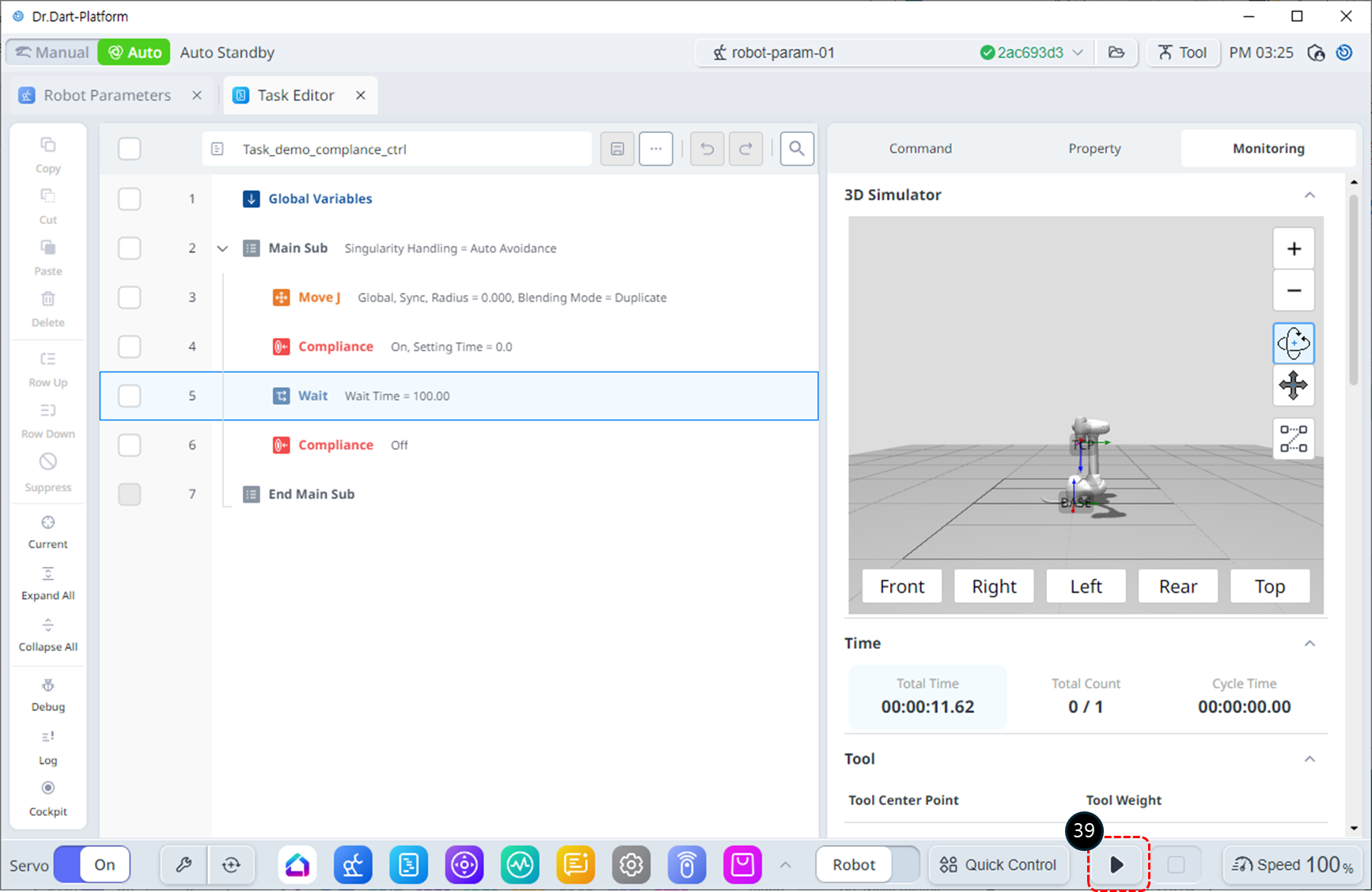
V dolní nabídce vyberte modul Editor úloh.
-
Přejmenujte úlohu na Task_demo_Compliance_ctrl.
-
Uložte aktualizovaný název úkolu.
-
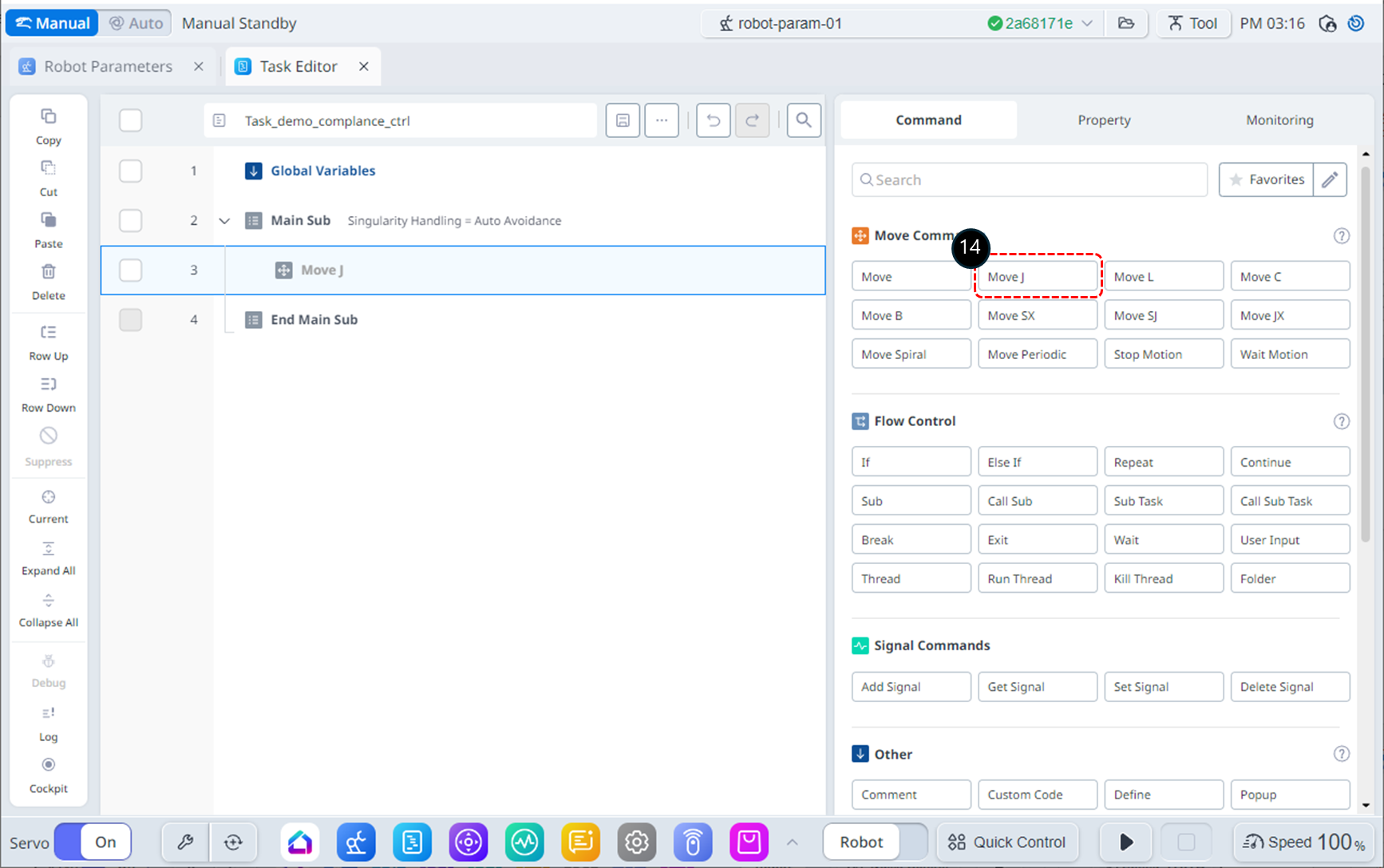
Přidejte příkaz MoveJ. Tento povel slouží k přesunutí robota do výchozí polohy pro kontrolu dodržování předpisů.
-
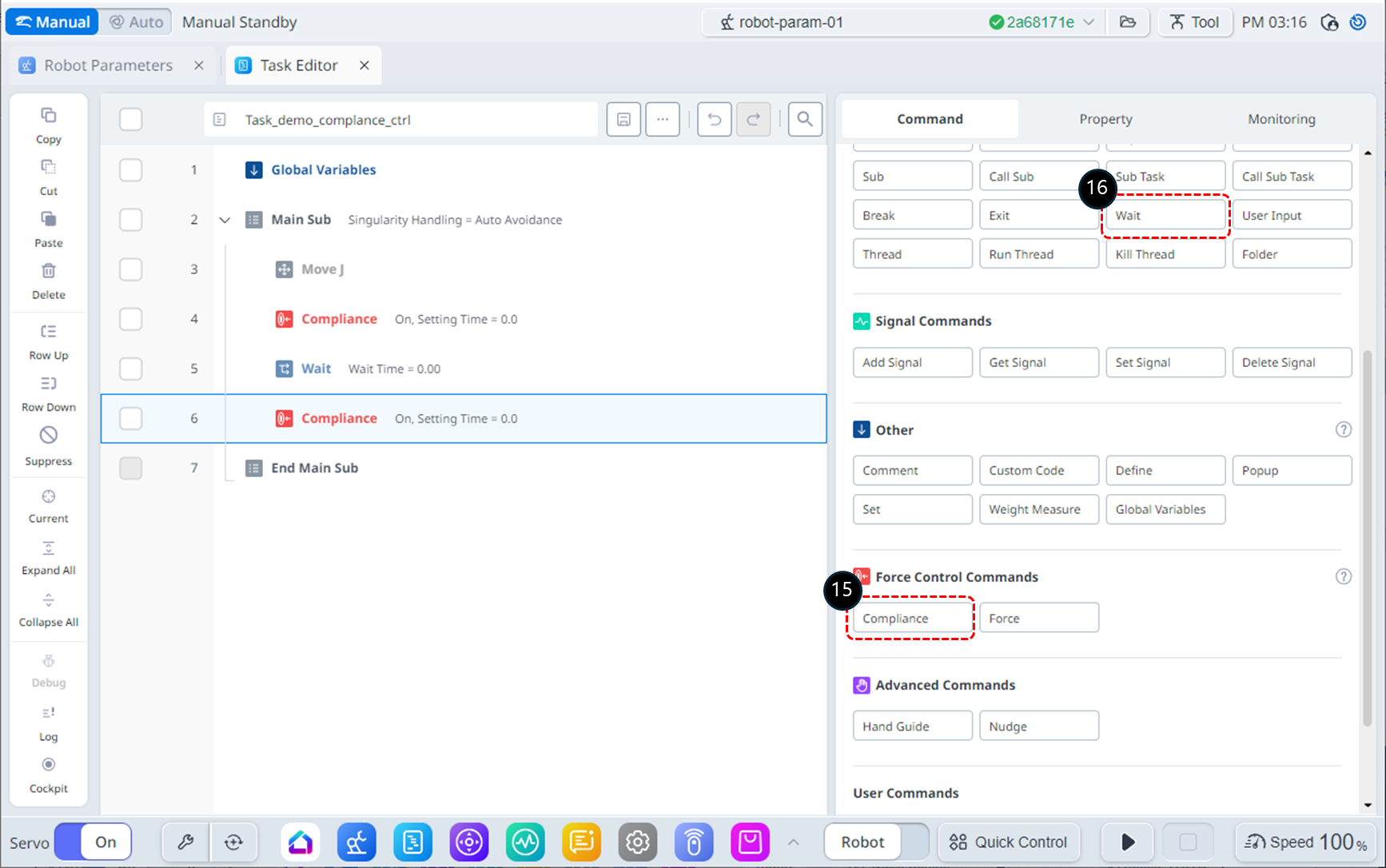
Přidejte dva příkazy compliance. Tyto příkazy budou použity k aktivaci a deaktivaci kontroly dodržování předpisů.
-
Mezi příkazy compliance vložte příkaz čekací. Tento povel čekání bude použit k udržení kontroly dodržování předpisů.
-
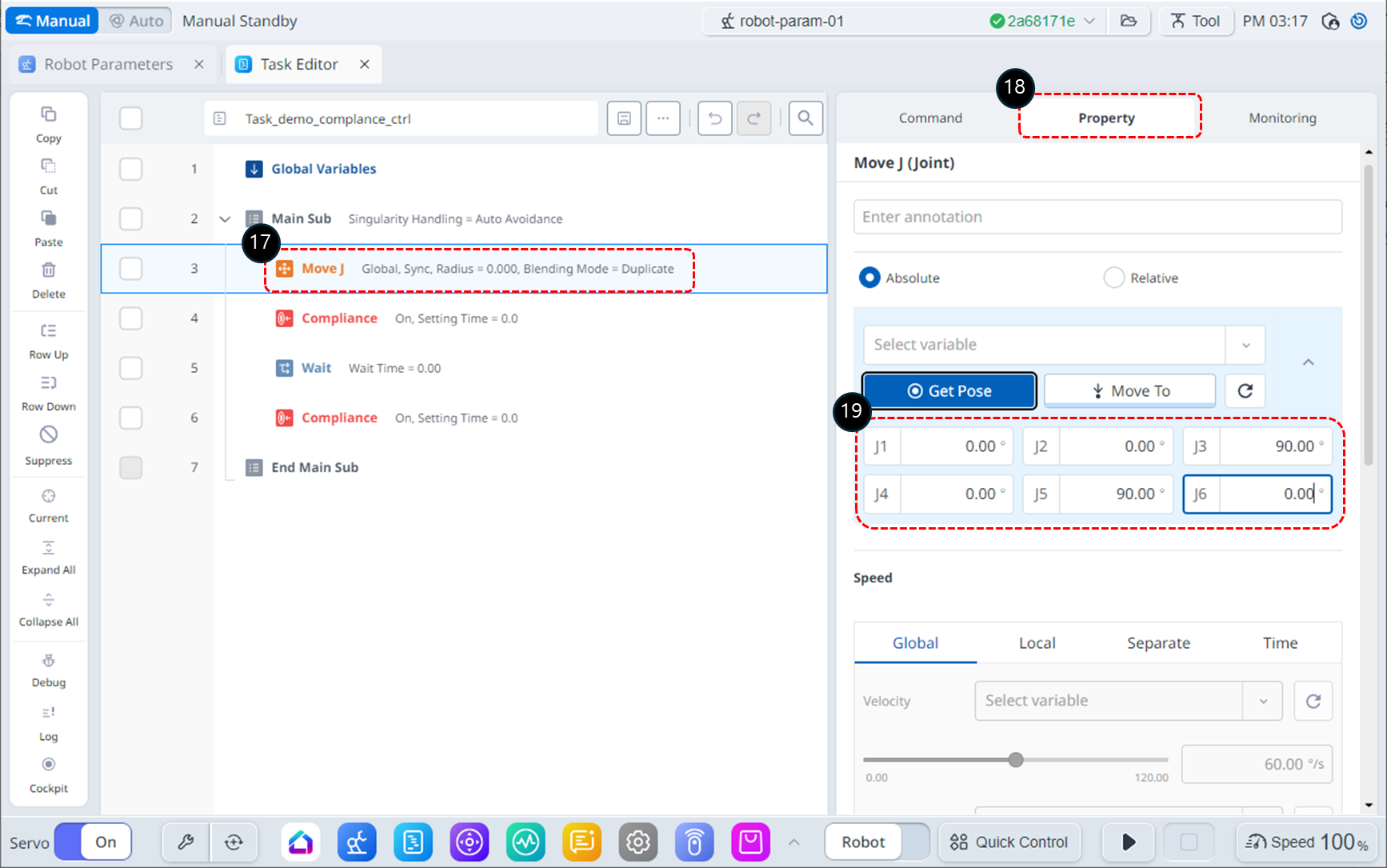
Vyberte příkaz MoveJ na řádku 3.
-
Vyberte kartu Vlastnosti.
-
Změnit cílovou polohu MoveJ na (0, 0, 90, 0, 90, 0) odd. V závislosti na montážním prostoru robota lze v případě potřeby nastavit úhel J1.
-
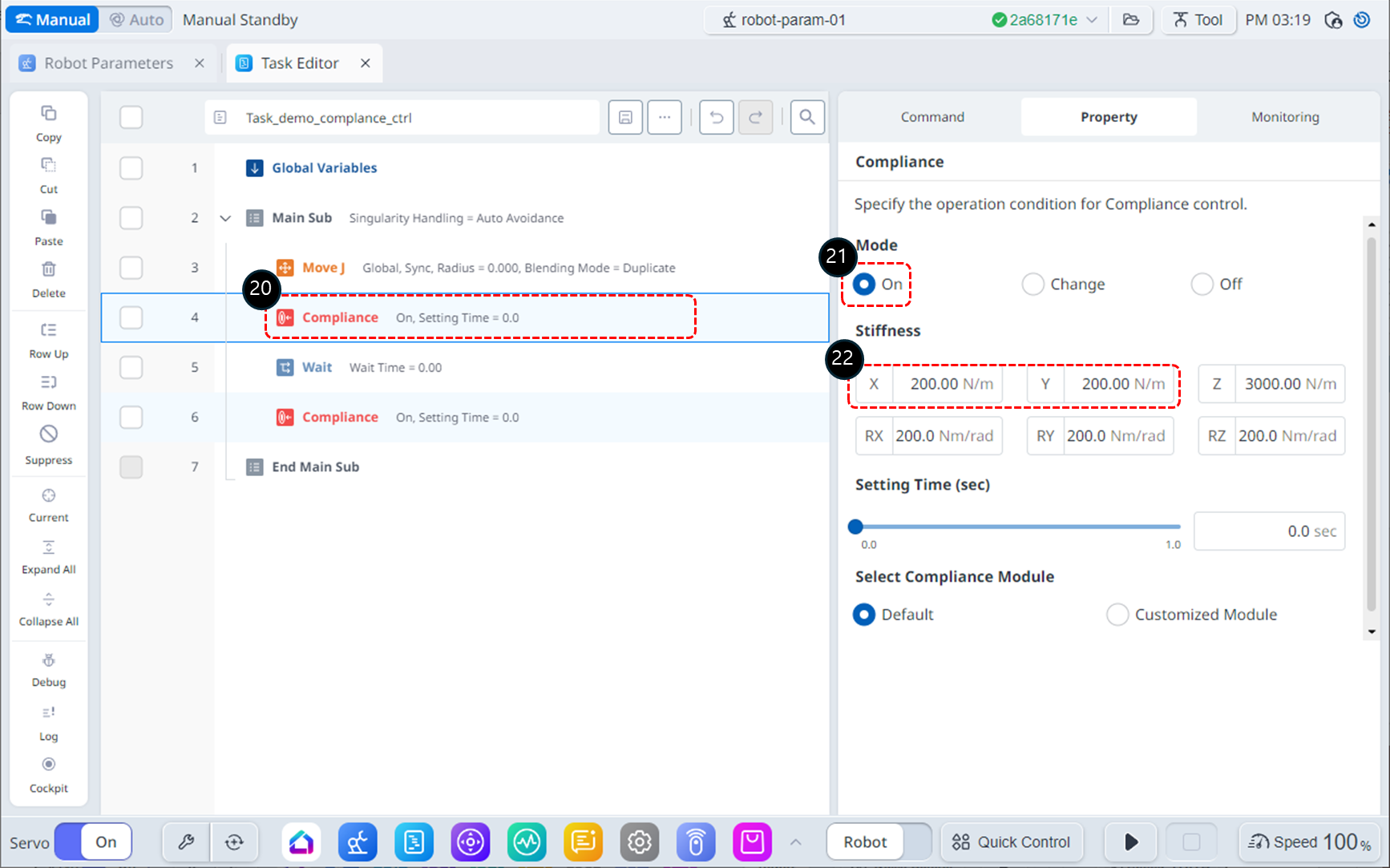
Vyberte příkaz compliance na řádku 4.
-
Na kartě Vlastnosti nastavte režim takto: Režim ZAPNUTO aktivuje kontrolu dodržování předpisů.
-
Režim: Zapnuto
-
-
Nastavte tuhost takto: Snižte tuhost ve směrech X a Y, aby robot reagoval jemněji v těchto směrech.
-
X: 200 N/m.
-
Y: 200 N/m.
-
Z: 3000 N/m (výchozí)
-
RX, Ry, Rz: 200 Nm/rad (výchozí)
-
-
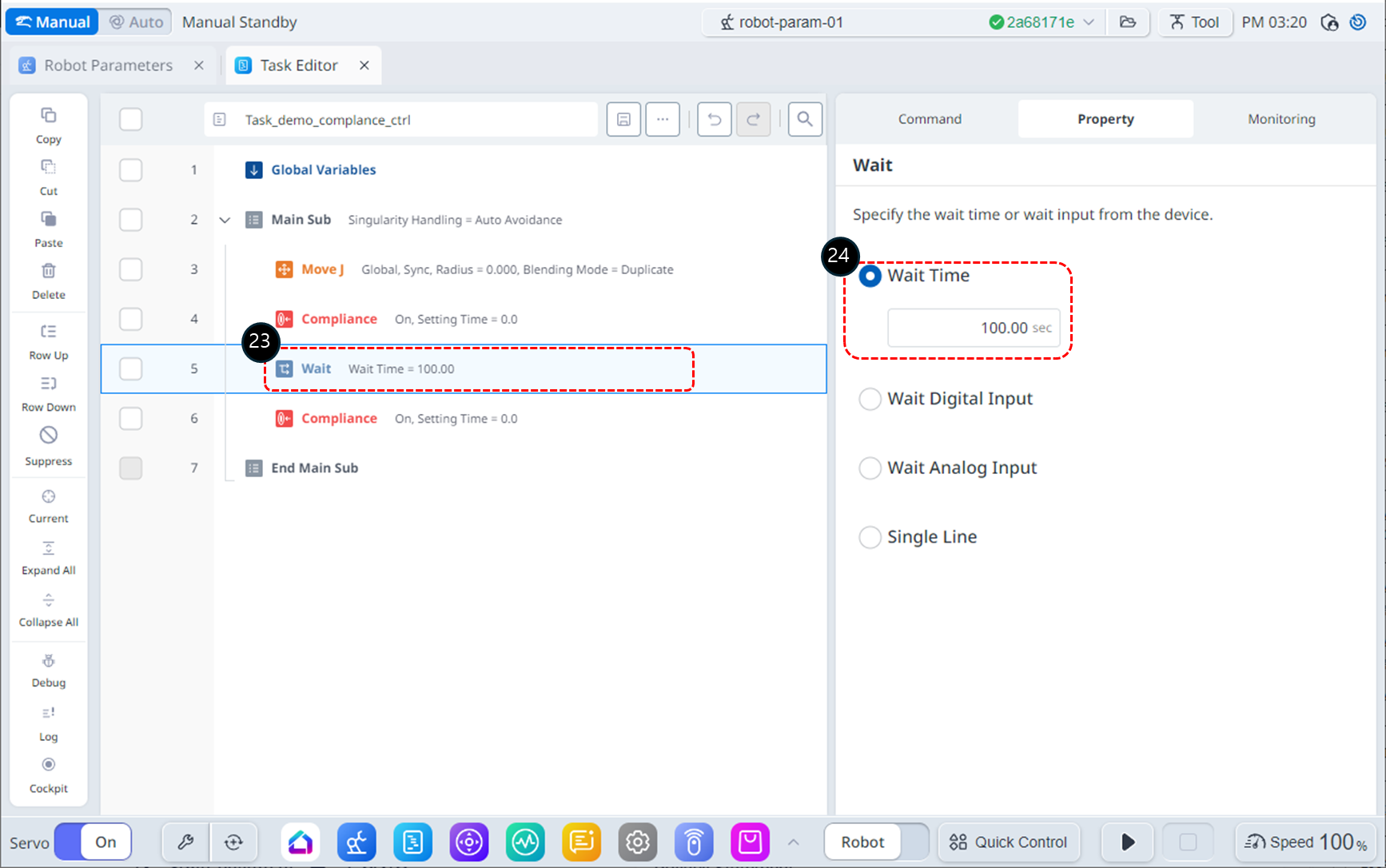
Vyberte příkaz čekání na řádku 5.
-
Nastavte čekací dobu následujícím způsobem.
-
Čekací doba: 100 s
-
-
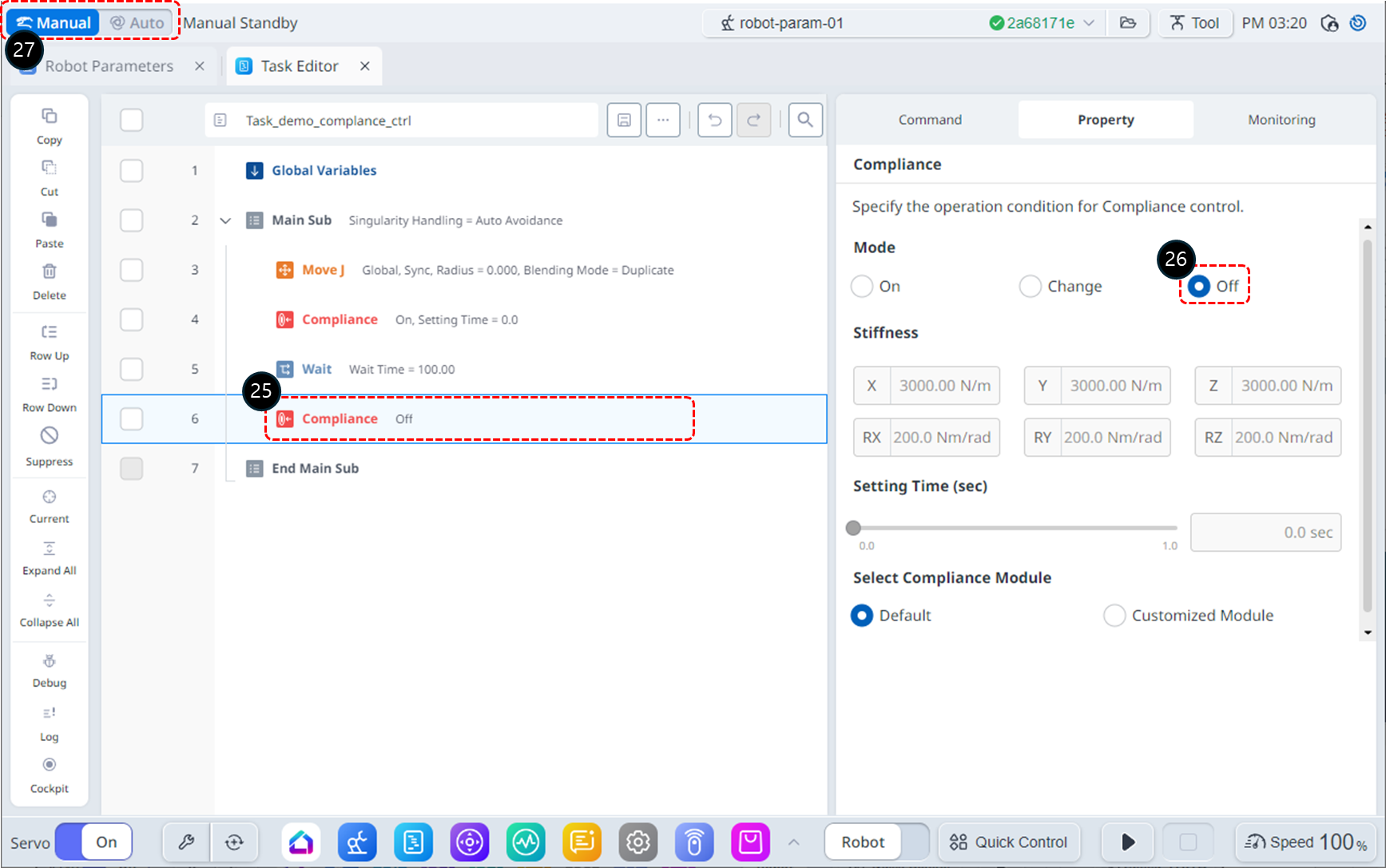
Vyberte příkaz compliance na řádku 6.
-
Na kartě Vlastnosti nastavte režim takto: Režim Vypnuto deaktivuje kontrolu dodržování předpisů.
-
Režim: Vypnuto
-
-
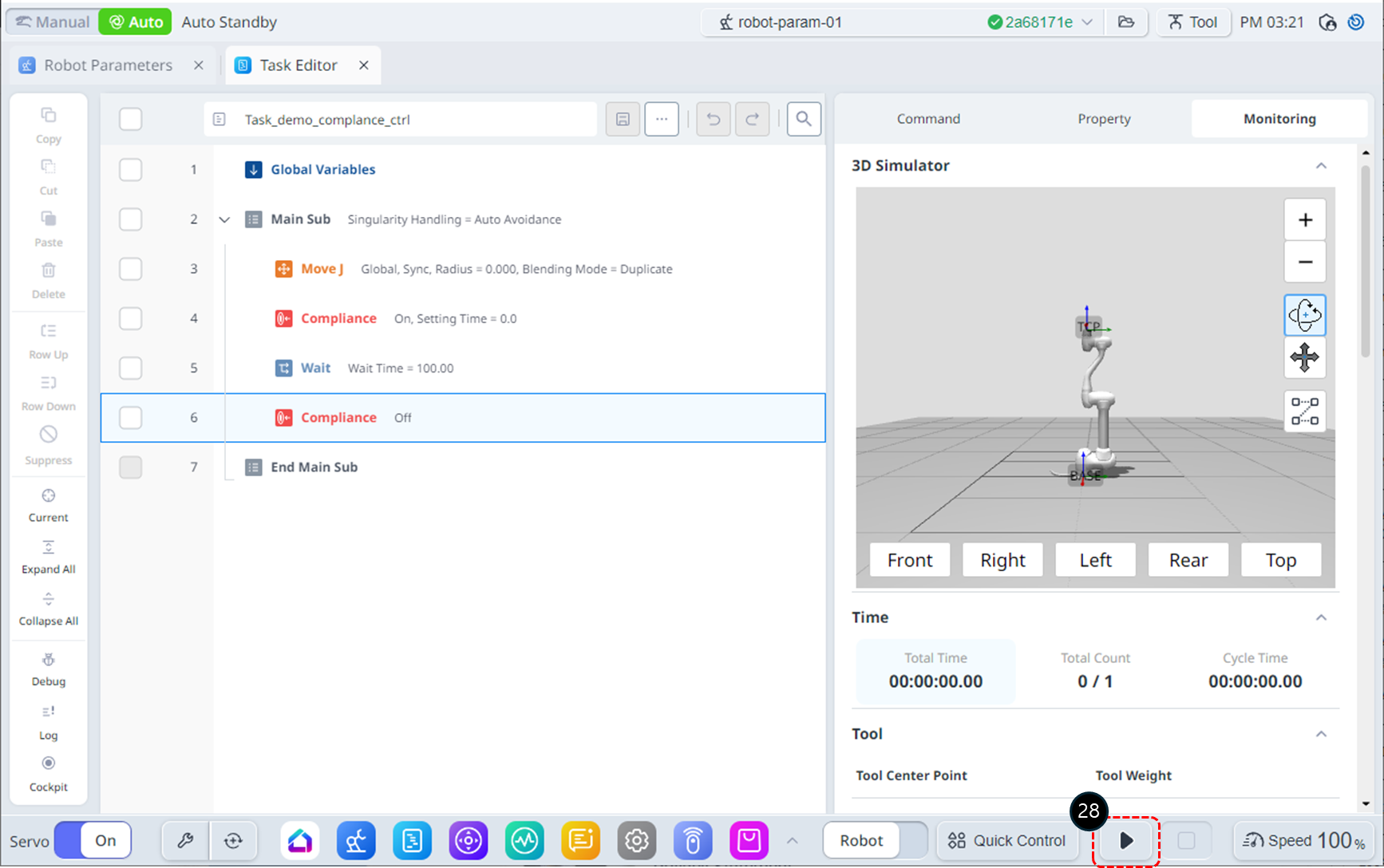
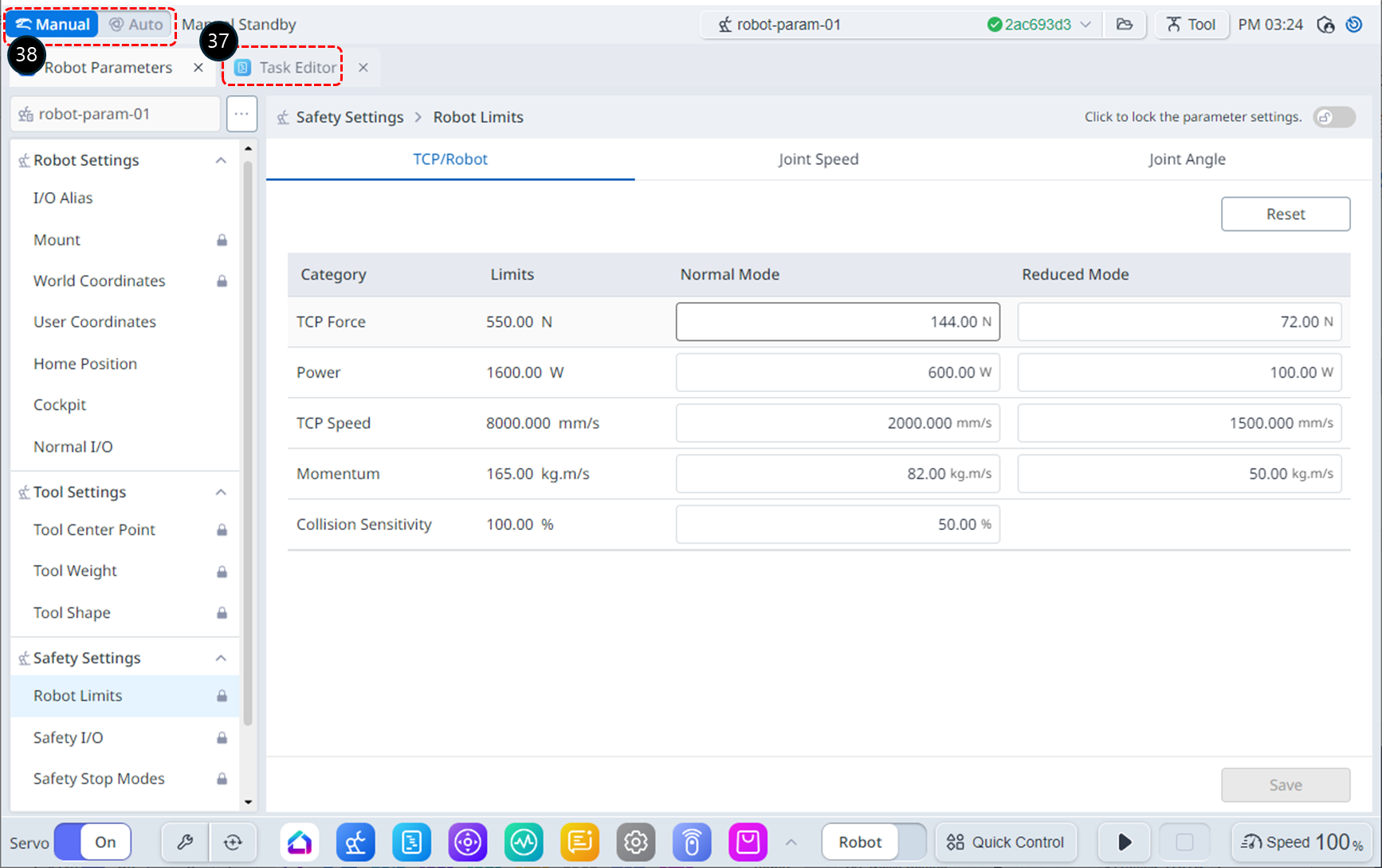
Změňte provozní režim na Auto. Karta Vlastnosti se automaticky přepne na kartu monitorování.
-
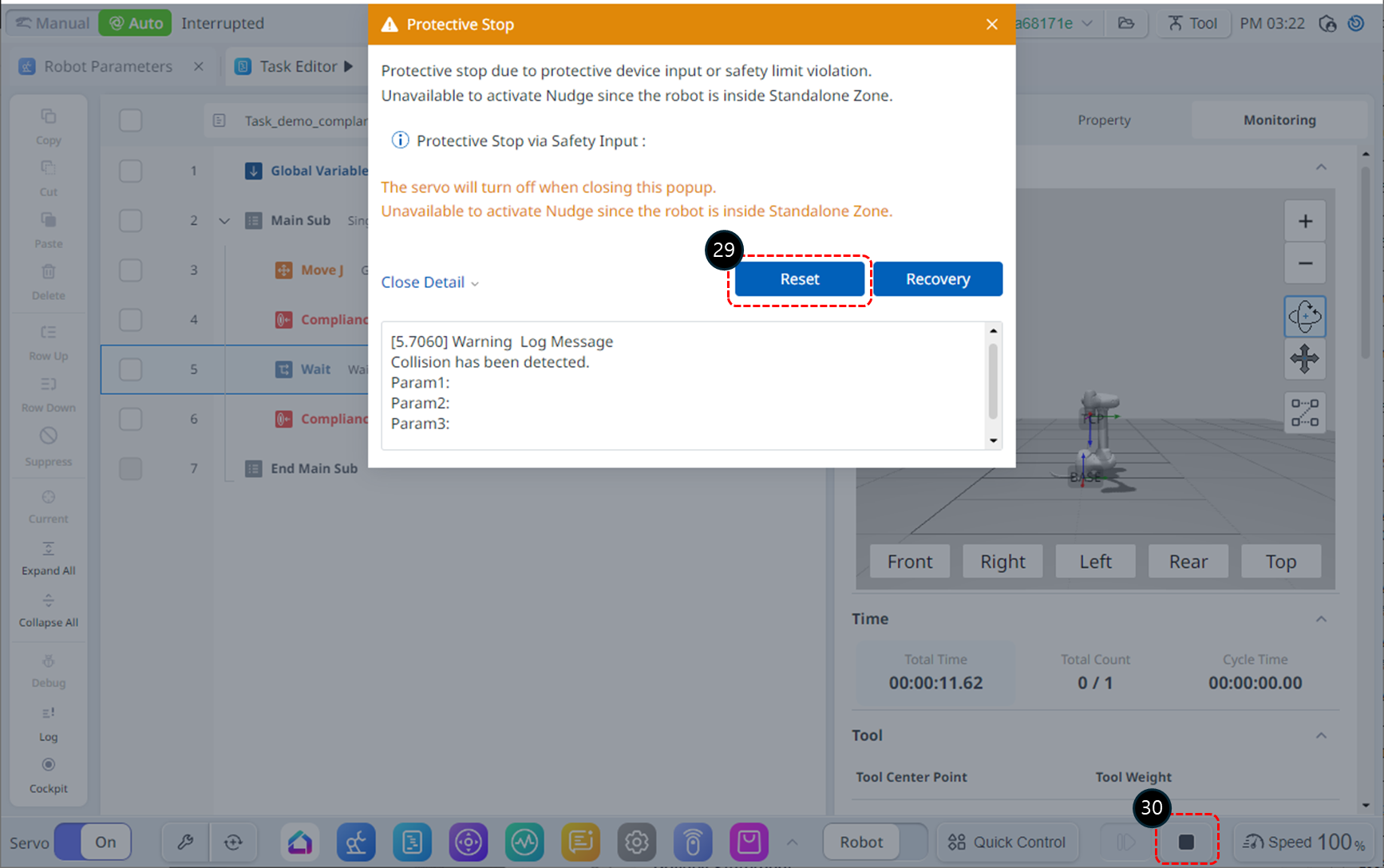
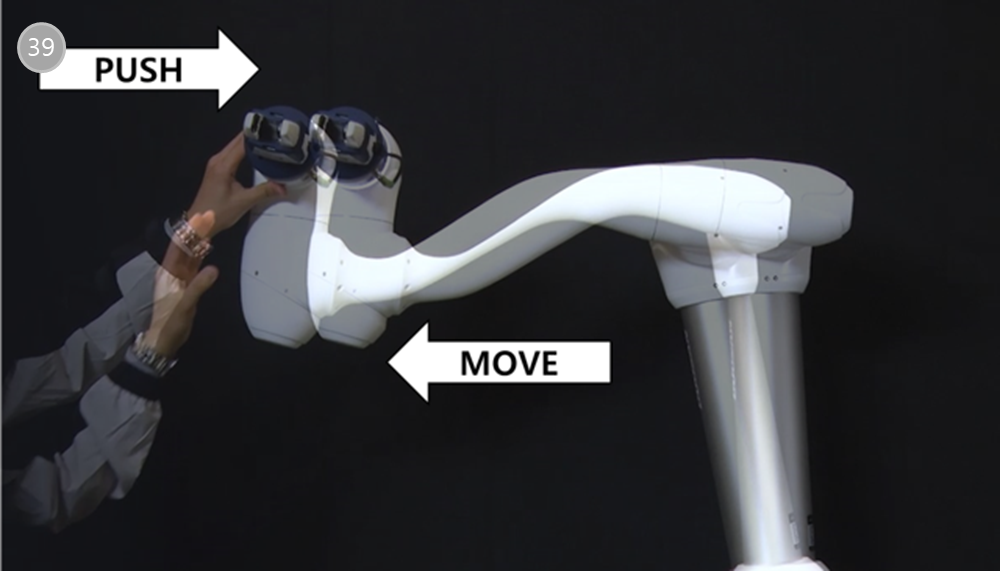
Klepněte na tlačítko Spustit. Robot se přesune do výchozí polohy, zahájí kontrolu dodržování předpisů a zůstane v klidu po dobu 100 sekund. Během této doby jemně zatlačte koncový efektor robota směrem k tělu robota. Robot se zastaví s chybou kolize (nebo chybou limitu síly TCP). Ve stavu bezpečnostního zastavení způsobeném kolizí zobrazí LED dioda robota žlutou barvu.
-
Klepněte na tlačítko Obnovit v okně varování před bezpečnostním zastavením. Operační program bude pokračovat v provozu.
-
Klepnutím na tlačítko Stop program ukončíte.
-
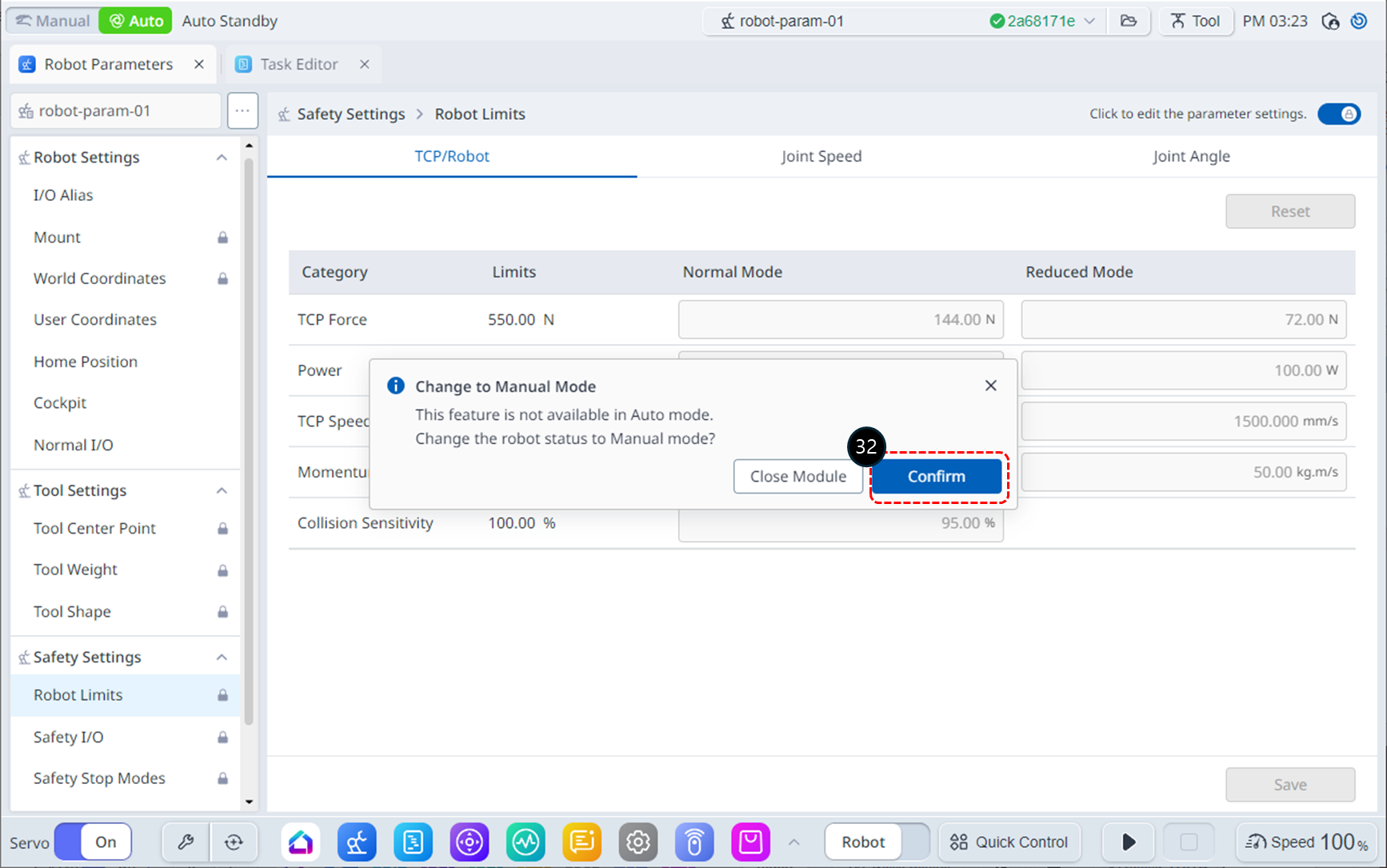
Pro řešení kolizních problémů je třeba snížit citlivost kolize v bezpečnostních nastaveních. (Pokud je problém s limitem síly TCP, parametr síly TCP by měl být zvýšen.) V dolní nabídce vyberte modul parametrů robota. Případně můžete vybrat kartu Modul parametrů robota v levém horním rohu, který funguje stejně.
-
V automatickém režimu spustí přístup k modulu parametry robota okno s upozorněním. Klepnutím na tlačítko potvrdit přepnete do ručního režimu.
-
V Nastavení bezpečnosti vyberte limity robota.
-
Povolte stav úpravy parametrů. Pokud se zobrazí okno pro zadání hesla, přejděte na kroky 6–7.
-
Upravte citlivost kolize na 50 %.
-
Klepnutím na tlačítko Uložit uložte nastavení. Pokud se zobrazí okno Kontrola parametrů robota, zkontrolujte úpravy a klepněte na tlačítko použít.
-
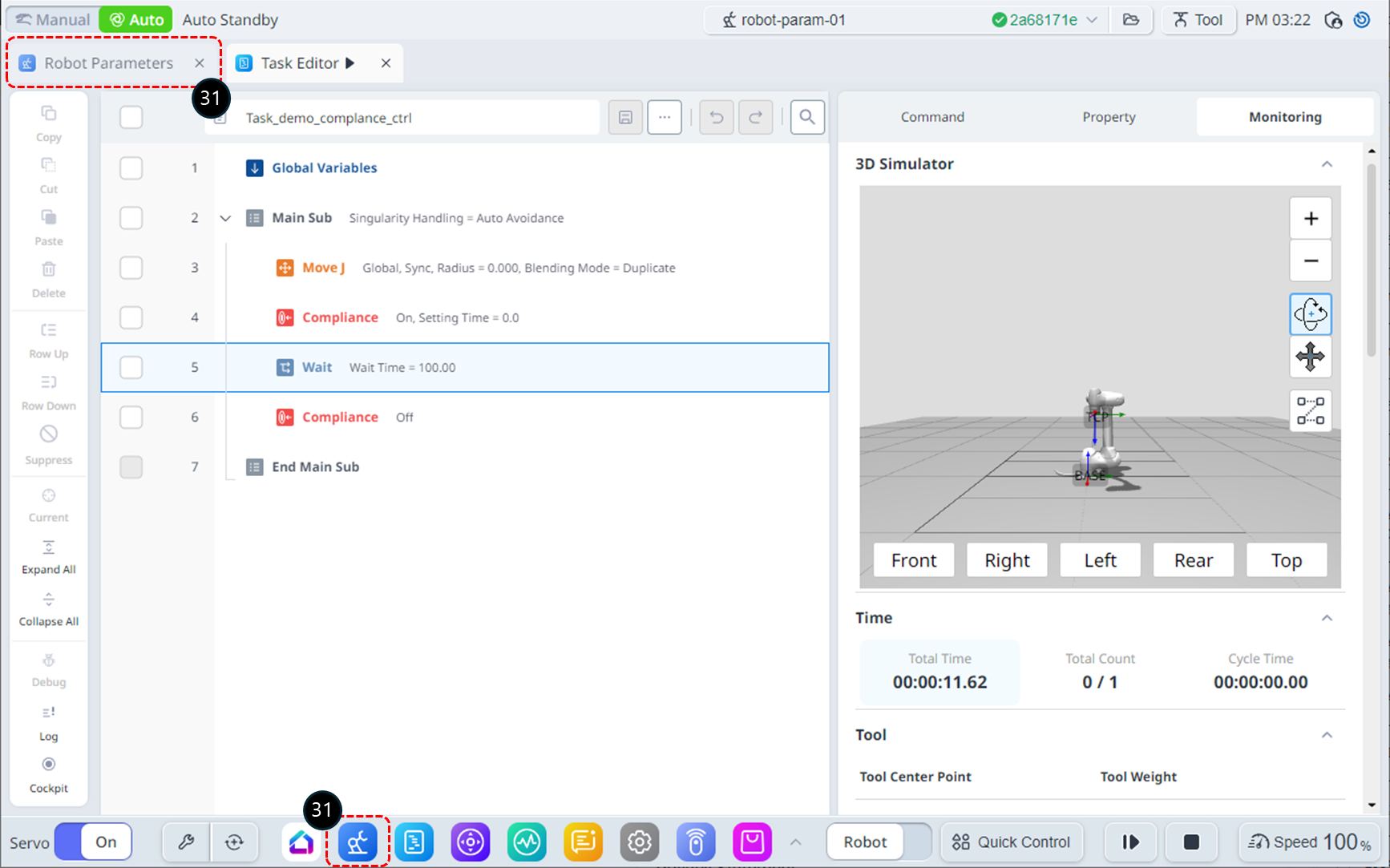
Vyberte kartu modulu Editor úloh.
-
Přepnutím do automatického režimu spustíte program úloh.
-
Klepněte na tlačítko Spustit. Během čekací doby jemně zatlačte koncový efektor robota směrem k tělu robota. Robot se bude pohybovat v důsledku tlačení síly, a jakmile uvolníte ruku, vrátí se do své původní polohy.