-
Stop distance je úhel ujeté od okamžiku, kdy je generován signál stop do okamžiku, kdy je veškerý provoz manipulátoru zastavován.
-
Čas zastavení je čas od okamžiku, kdy je generován signál zastavení do okamžiku, kdy je veškerý provoz manipulátoru zastavován.
-
Údaje o vzdálenosti zastavení a době zastavení jsou poskytovány pro spoje 1, Joint 2 a Joint 3, které mají velké cestovní vzdálenosti.
-
Pohyb překrývající se osy může způsobit delší dorazovou vzdálenost.
-
Údaje o vzdálenosti zastavení a době zastavení jsou definovány podle prohlášení a certifikace KS B ISO 10218-1:2011.
Zastavit kategorii
|
Zastavit kategorii |
Popis |
|
|---|---|---|
|
1 |
Zastavit kategorii 0 |
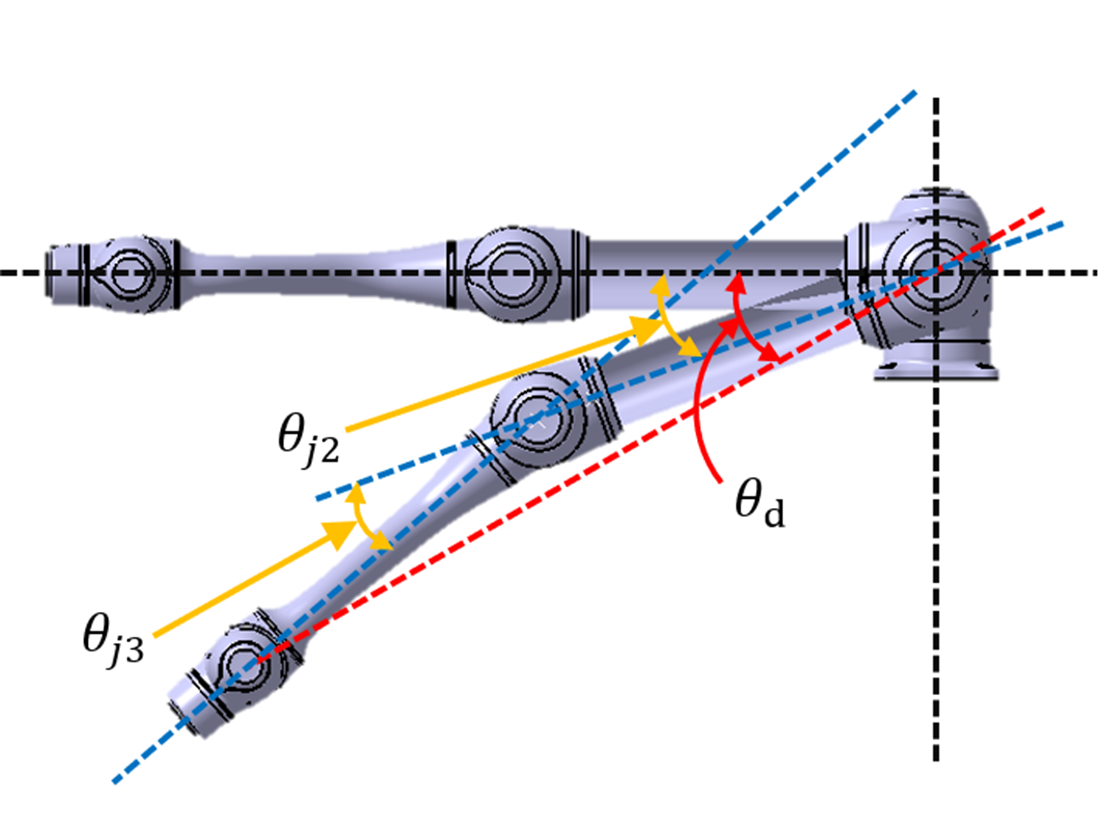
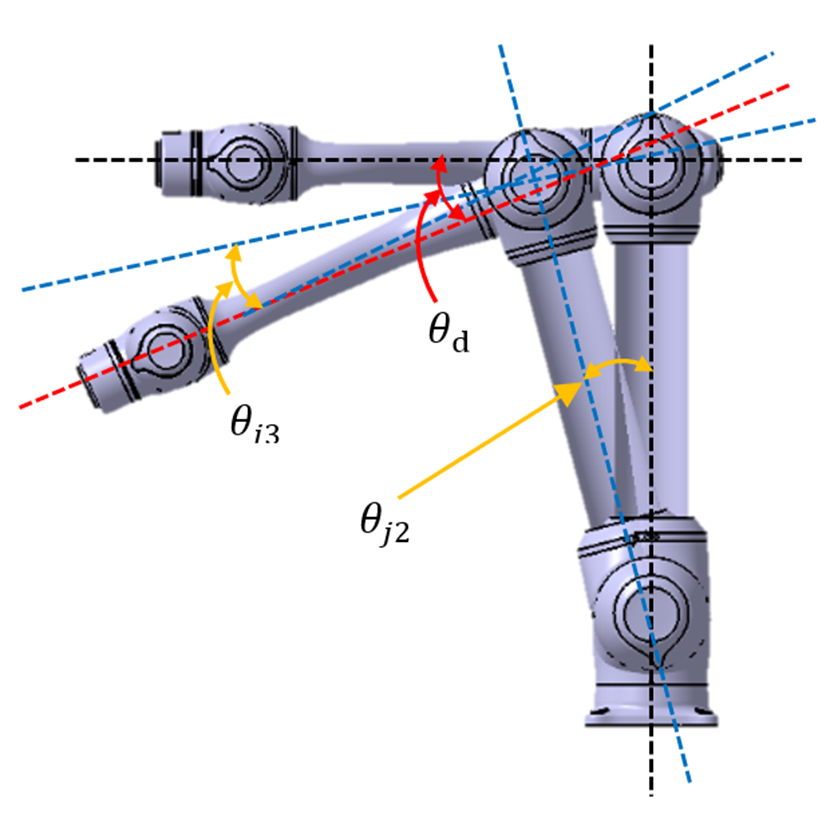
Dorazová vzdálenost a doba zastavení kloubu 1 (základna), kloubu 2 (rameno) a kloubu 3 (koleno) se měří maximální rychlostí, úrovní roztažení a zatížením. Osy spoje 2 a spoje 3 jsou vzájemně rovnoběžné, takže náraz způsobený nuceným zastavením na jedné straně může způsobit prokluz na druhé straně. Také se měří odchylka úhlu. |
|
2 |
Zastavit kategorii 1 |
Dorazová vzdálenost a doba zastavení spoje 1 (základna) a spoje 2 (rameno) se měří na 33 %, 66 % a 100 % maximální rychlosti, úrovně roztažení a zatížení. Dorazová vzdálenost a doba zastavení spoje 3 (loket) se měří při 33%, 66% a 100% maximální rychlosti a zatížení. Úroveň protažení při měření Joint 3 je zajištěna na maximum díky délce dolního ramene a zcela plochému zápěstí. |
Pozice a podmínky měření
Měření spoje 1 se provádí s rotační osou kolmou k zemi a při vodorovném pohybu.
Měření spoje 2 a spoje 3 se provádějí s rotační osou rovnoběžnou se zemí a při zastavení robota ve svislém směru směrem dolů k zemi.
Poznámka
Měření jsou výsledkem nejhoršího případu. Měření se může lišit v závislosti na okolnostech
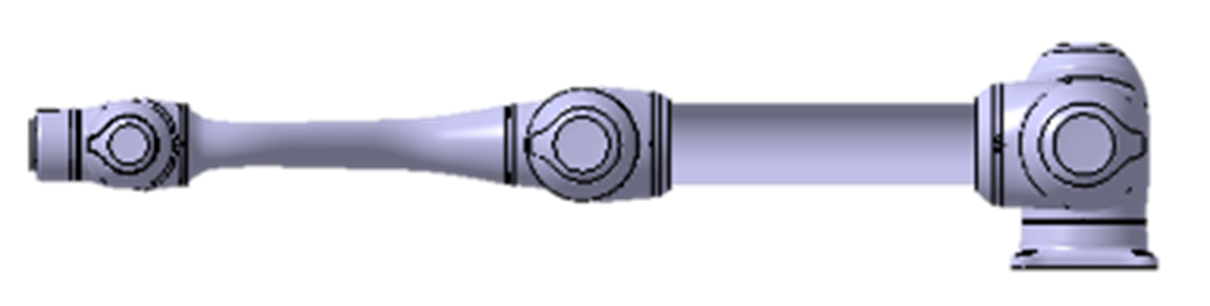
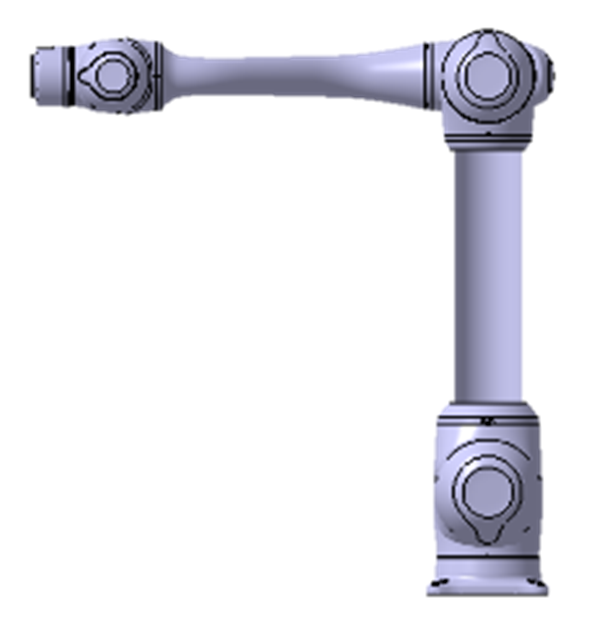
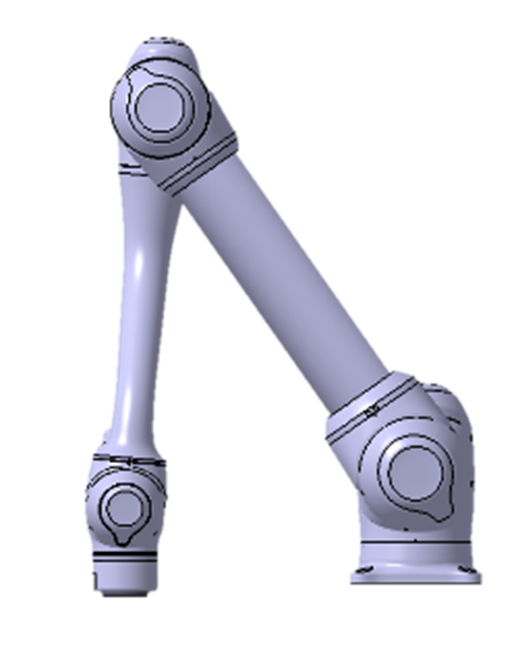
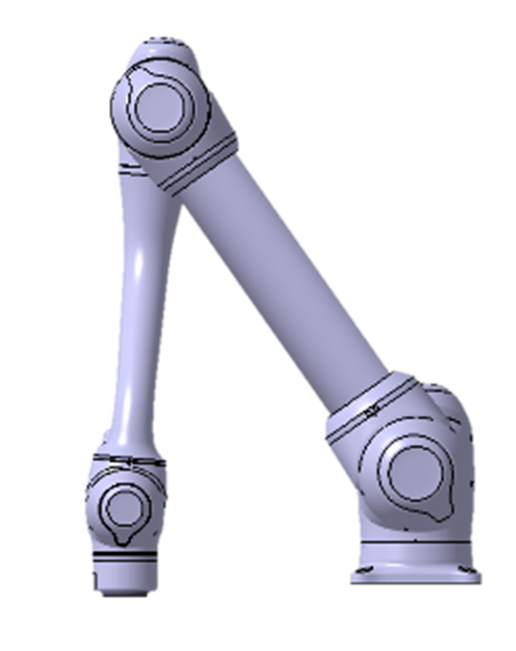
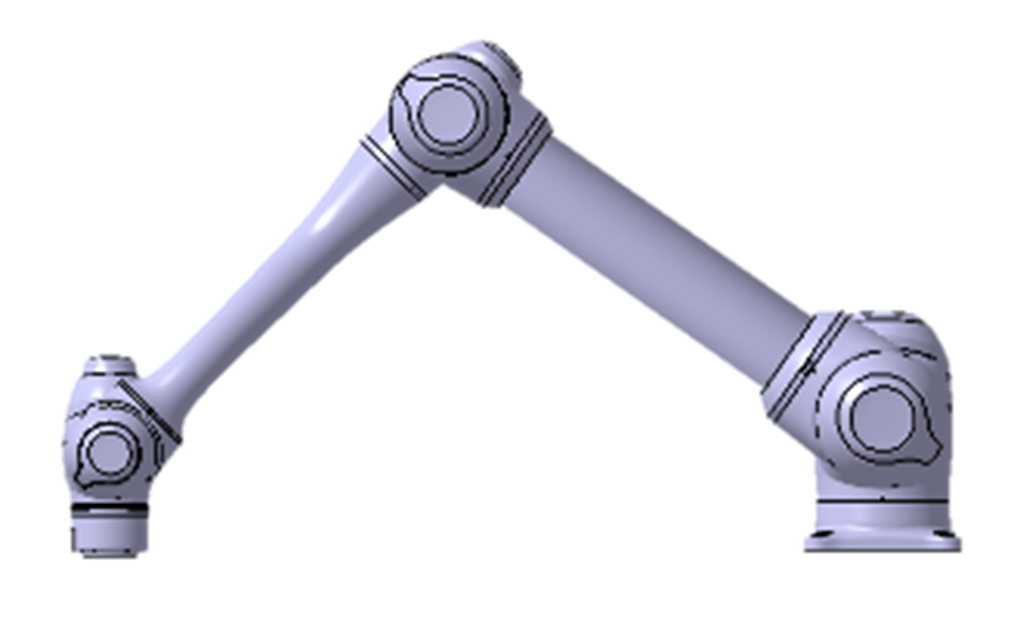
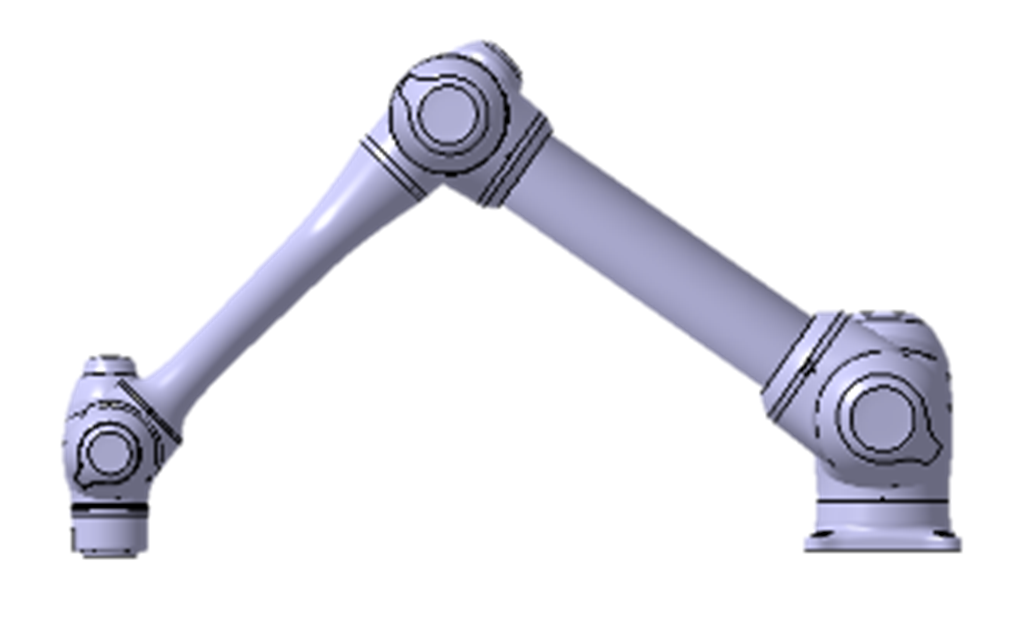
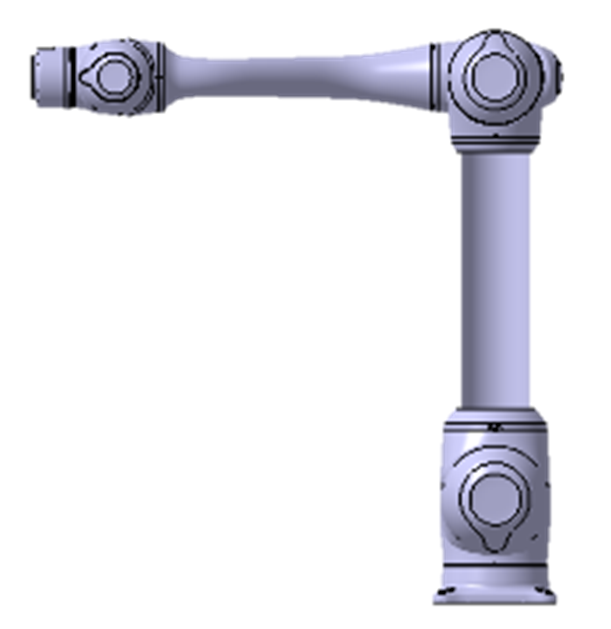
Póza pro 33%, 66% a 100% prodloužení
|
|
Společný 1 |
Společný 2 |
Společný 3 |
|
100% prodloužení Zastavení kategorie 0 |
|

|
|
|
33% prodloužení Zastavení kategorie 1 |
|
|
- |
|
66% prodloužení Zastavení kategorie 1 |
|
|
- |
|
100% prodloužení Zastavení kategorie 1 |

|

|
|
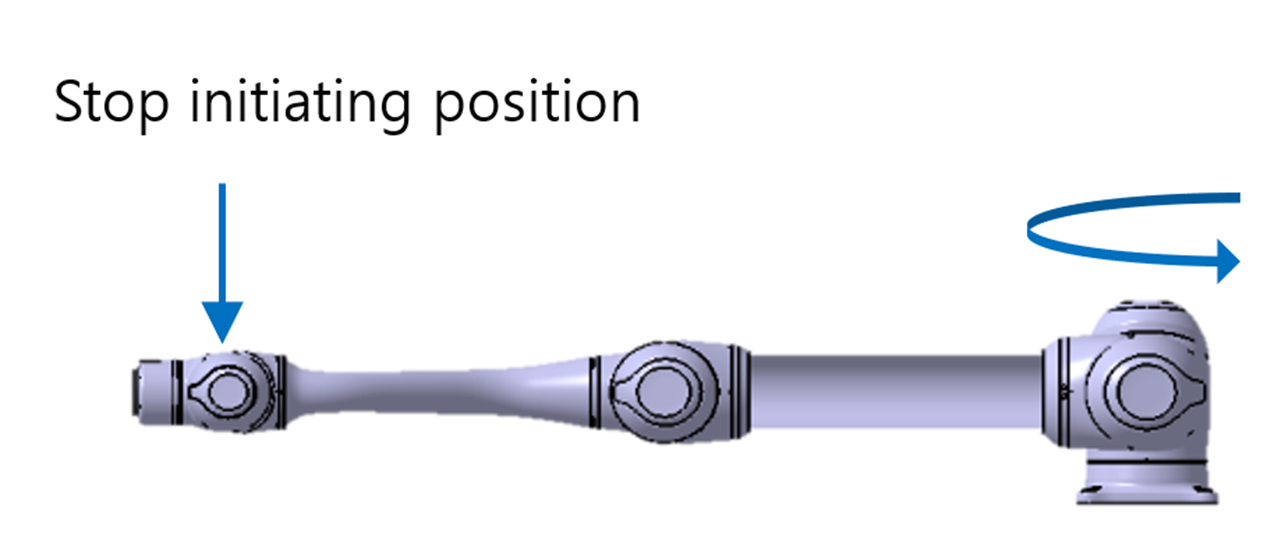
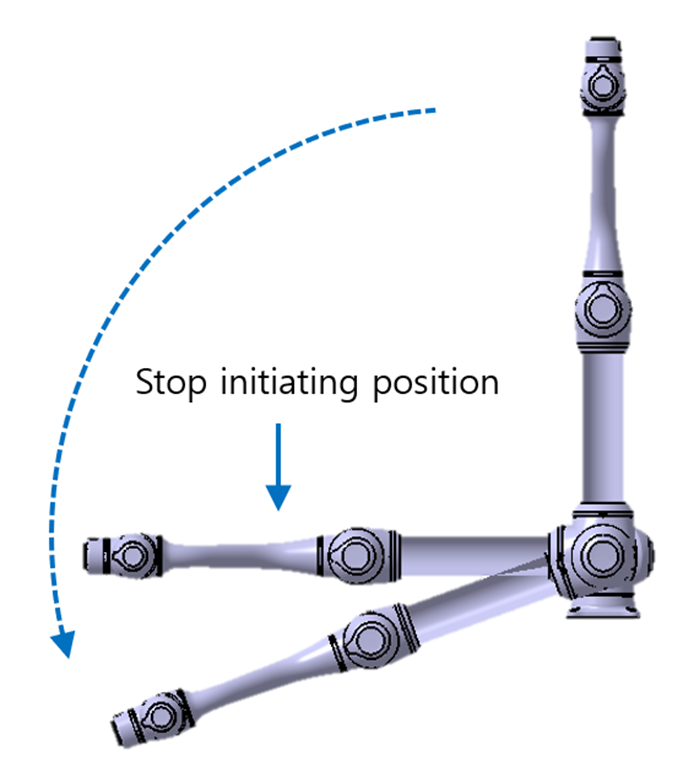
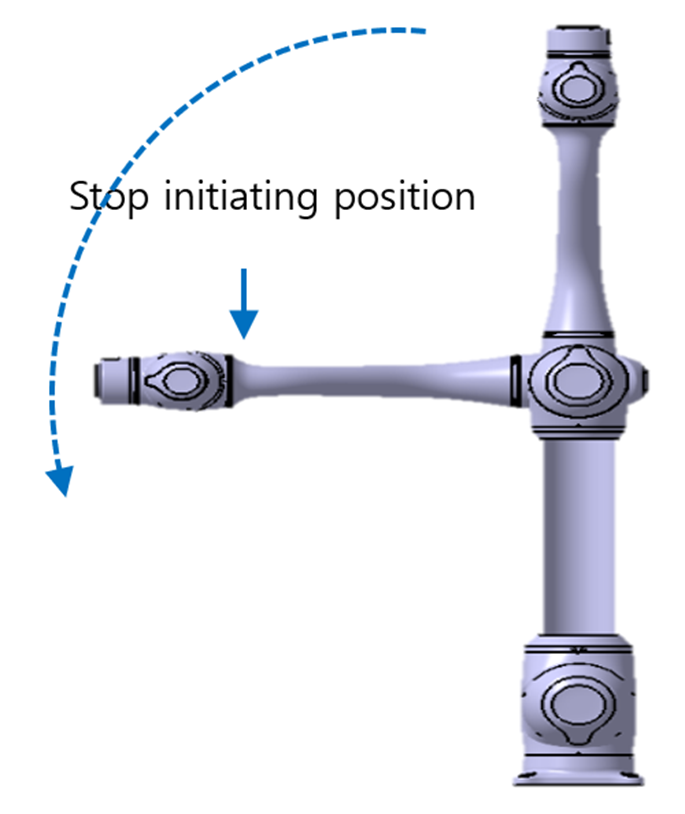
Póza při zahájení zastavení a změřený úhel (θd )
|
|
Pózujte, když je iniciována zastávka |
Změřený úhel |
|
Joint1
|
|
Bez prokluzu, |
|
Joint2 |
|
|
|
Joint3 |
|
|