Vigyázat
A minta kipróbálása előtt olvassa el és kövesse az óvintézkedéseket. További információkért lásd a 1. RÉSZT. Biztonsági kézikönyv.
Megjegyzés
Ehhez a mintához a Próbálkozási megfelelőségi parancsmintákban létrehozott Task Writer fájlra van szükség
-
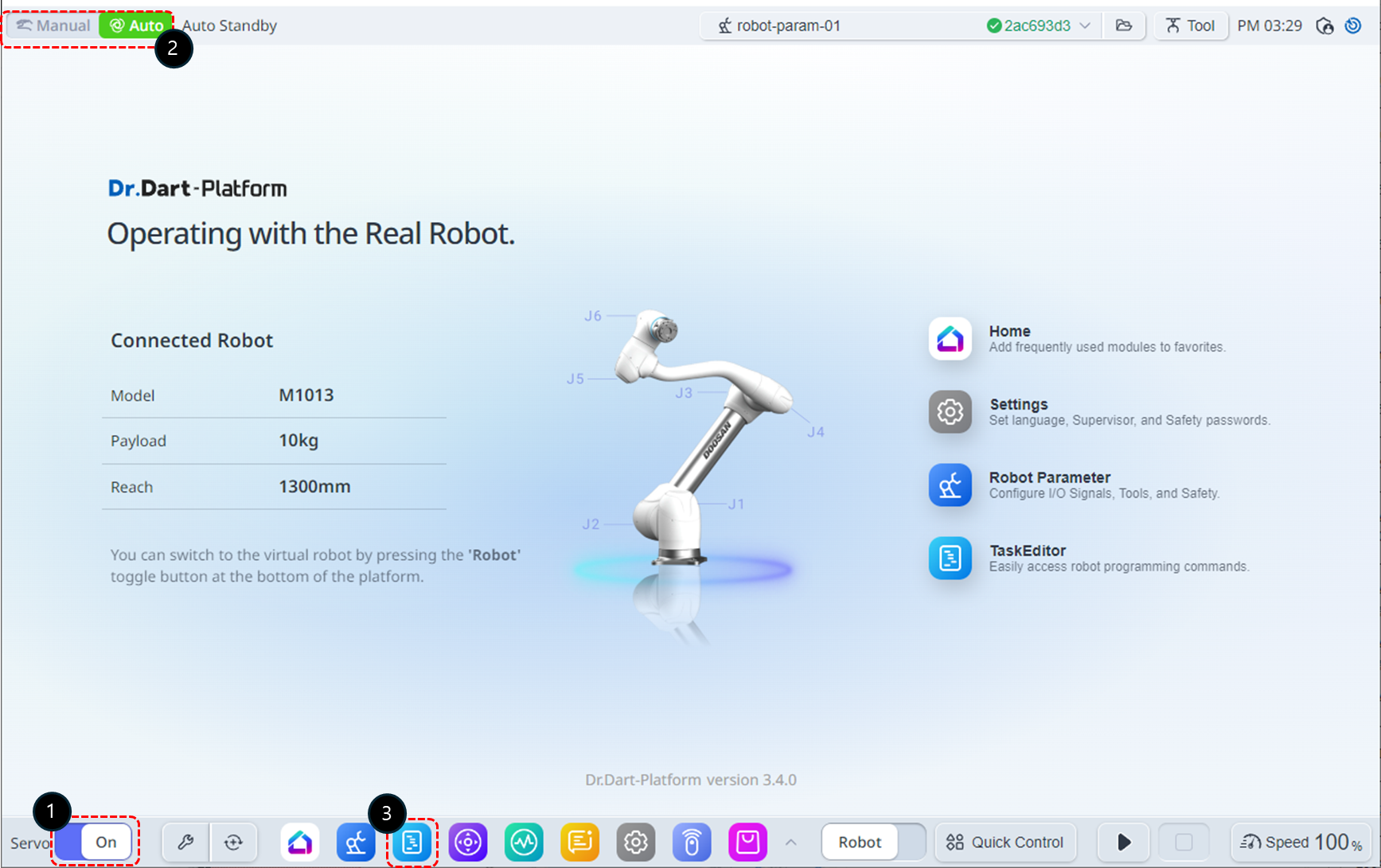
Állítsa a szervó állapotot On (be) állásba.
-
Kapcsolja a működési módot Kézi üzemmódra.
-
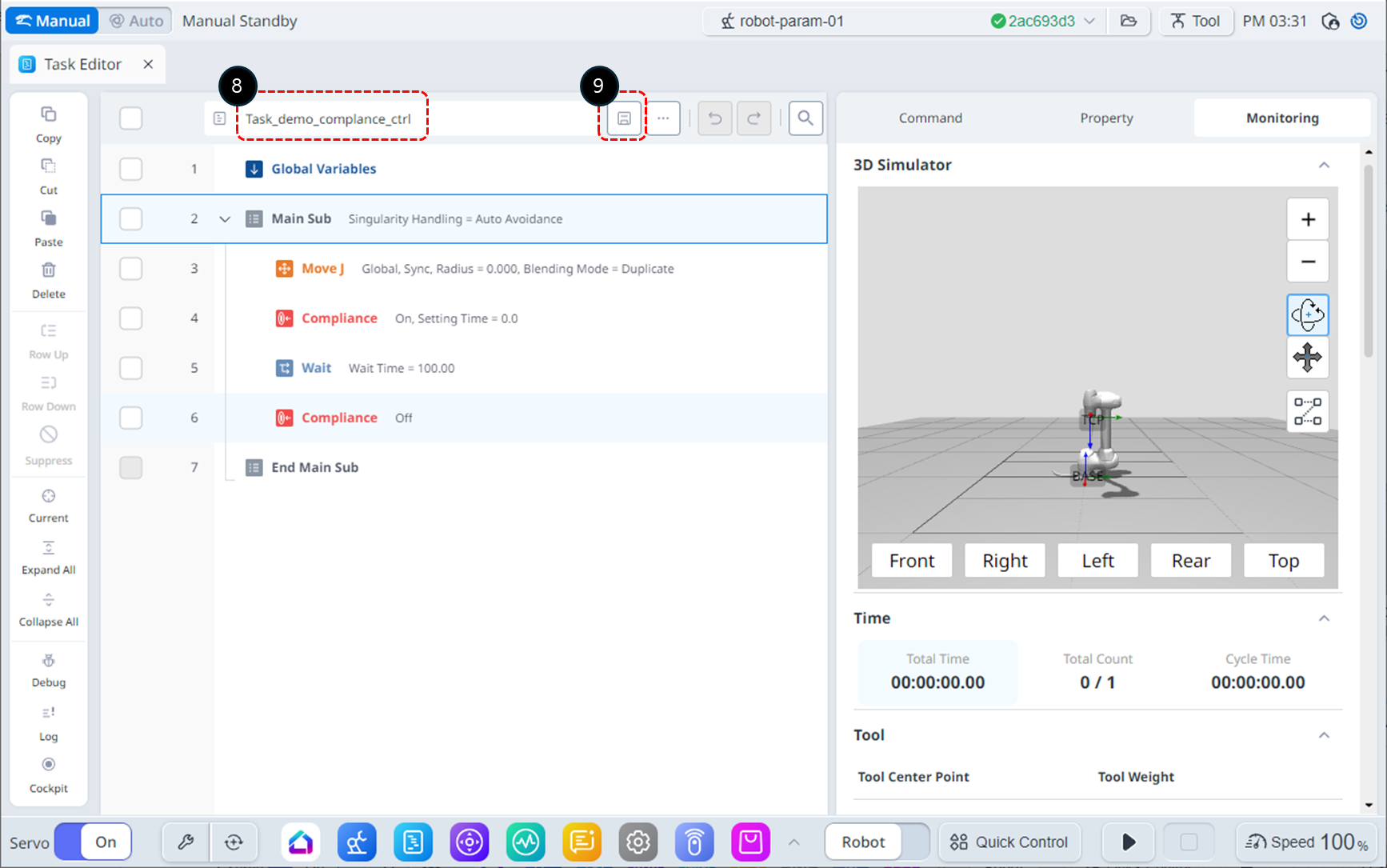
Válassza ki a Feladatszerkesztő modult az alsó menüből.
-
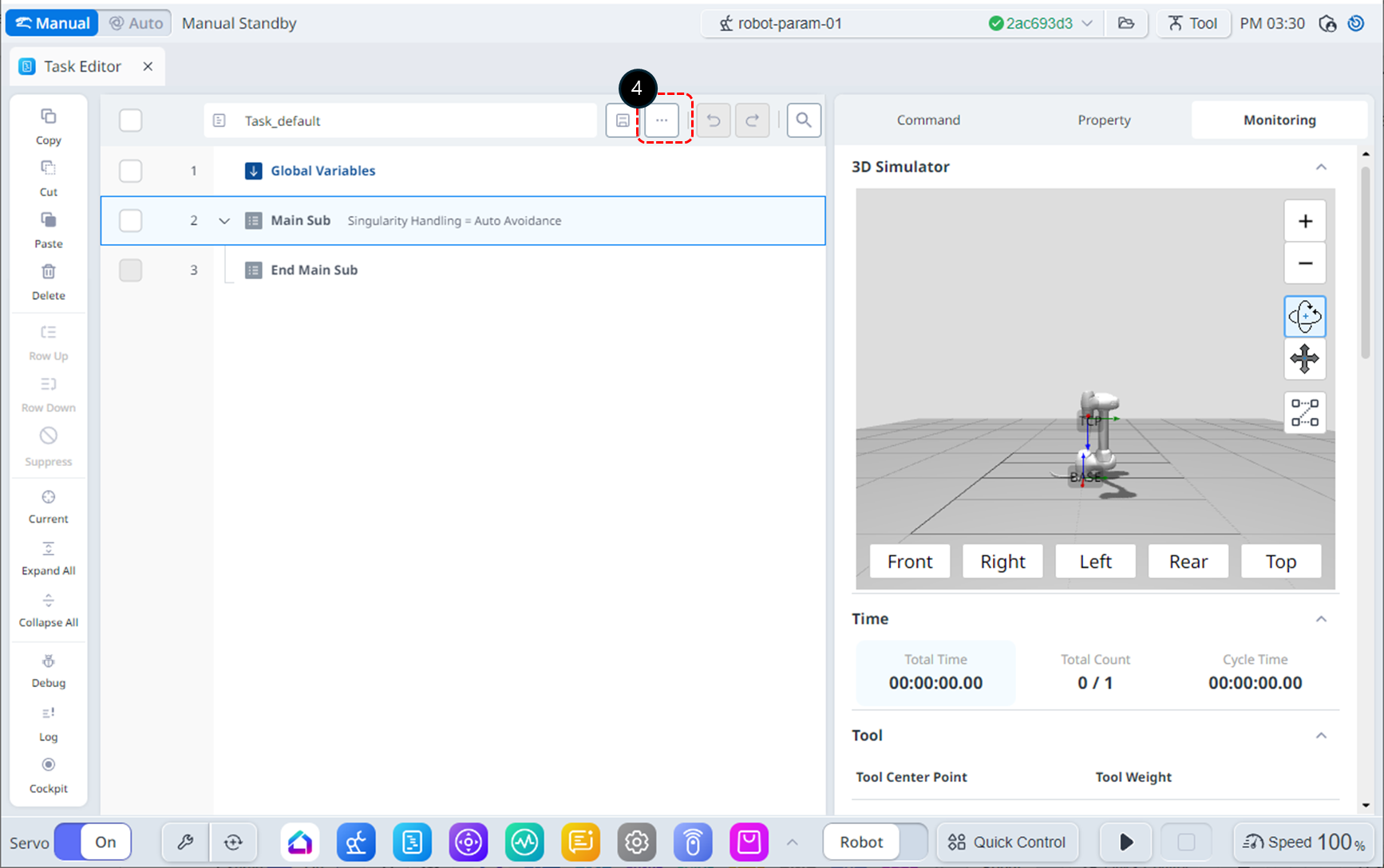
Kattintson a Fájl gombra.
-
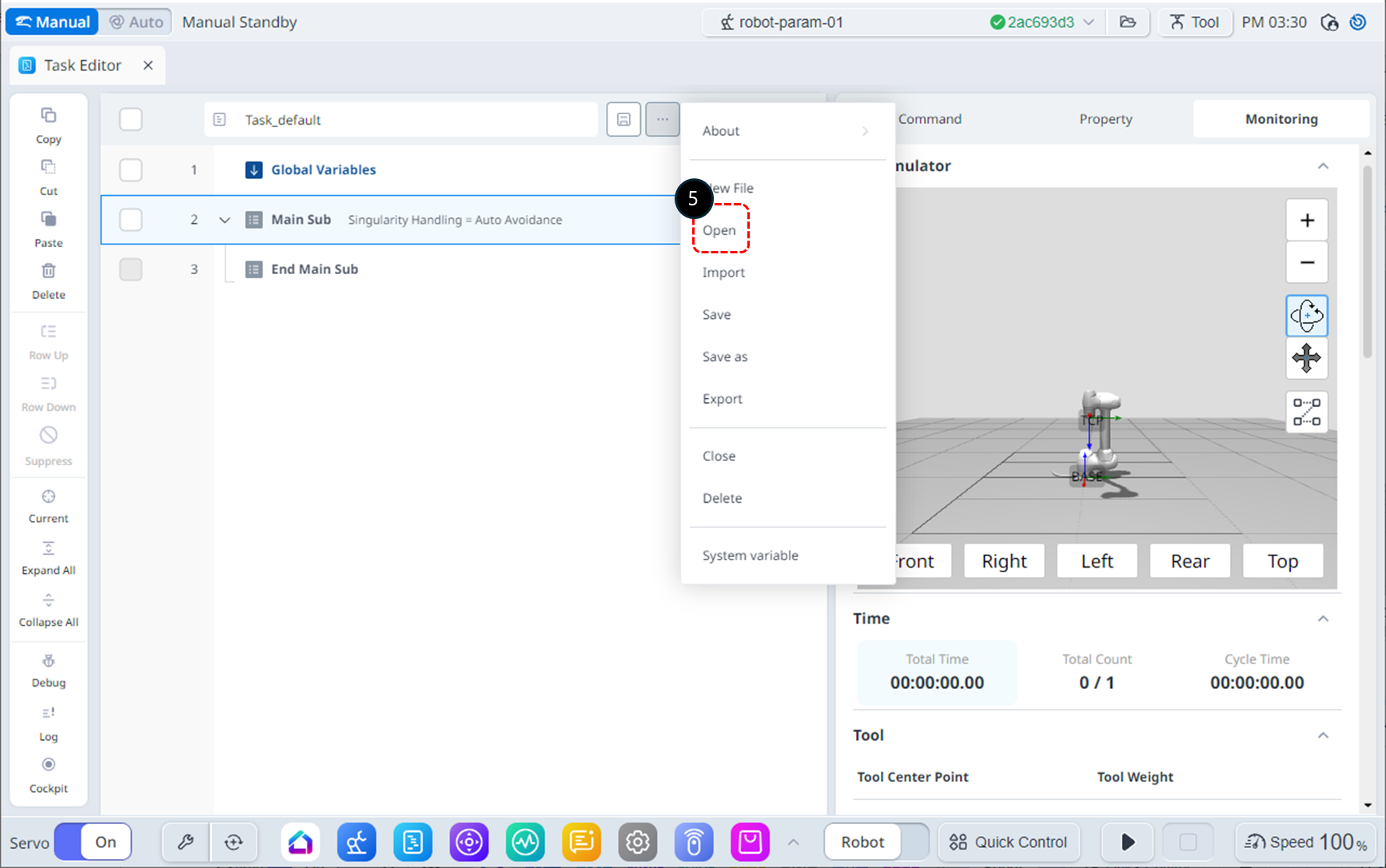
Kattintson a Megnyitás gombra.
-
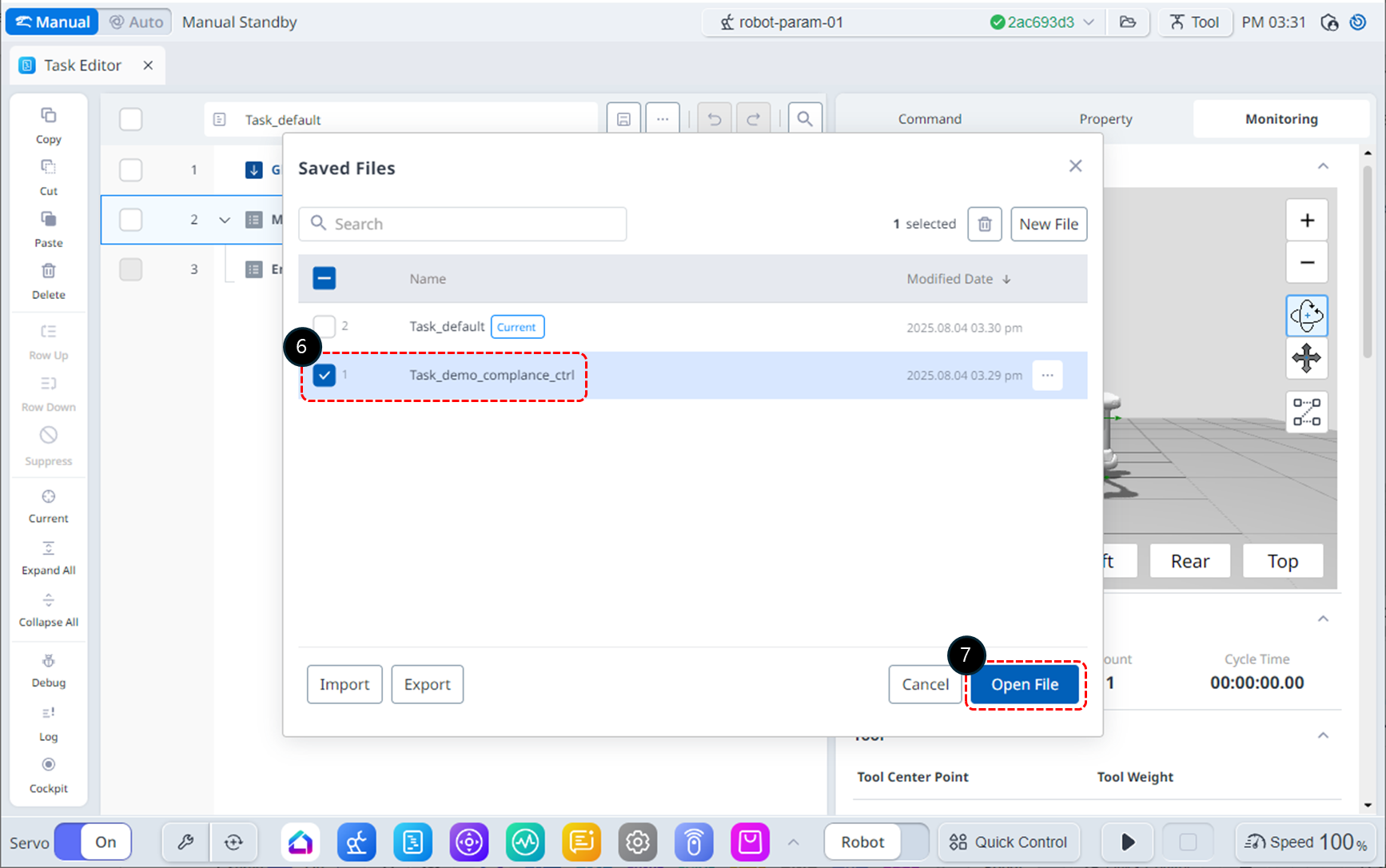
Válassza ki a feladat_demo_compliance_ctrl fájlt , amelyet a Próbálkozási compliance parancsmintákban hozott létre.
-
Kattintson a Fájl megnyitása gombra.
-
Nevezze át a fájlt Task_demo_Force_ctrl-re.
-
A fájlnév mentéséhez kattintson a Mentés gombra.
-
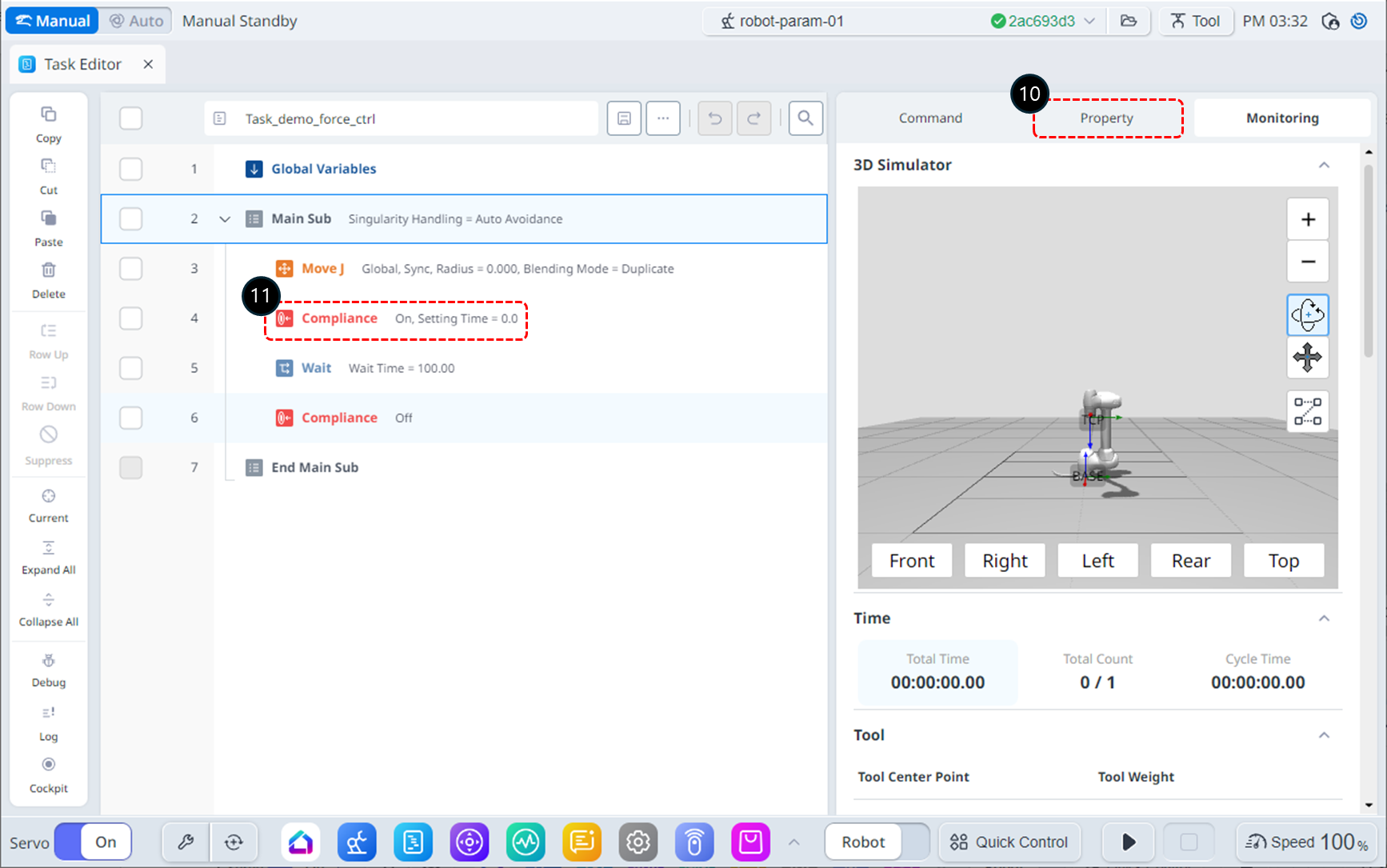
Válassza a Tulajdonság fület.
-
Válassza ki a Compliance parancsot a 4. Sorban.
-
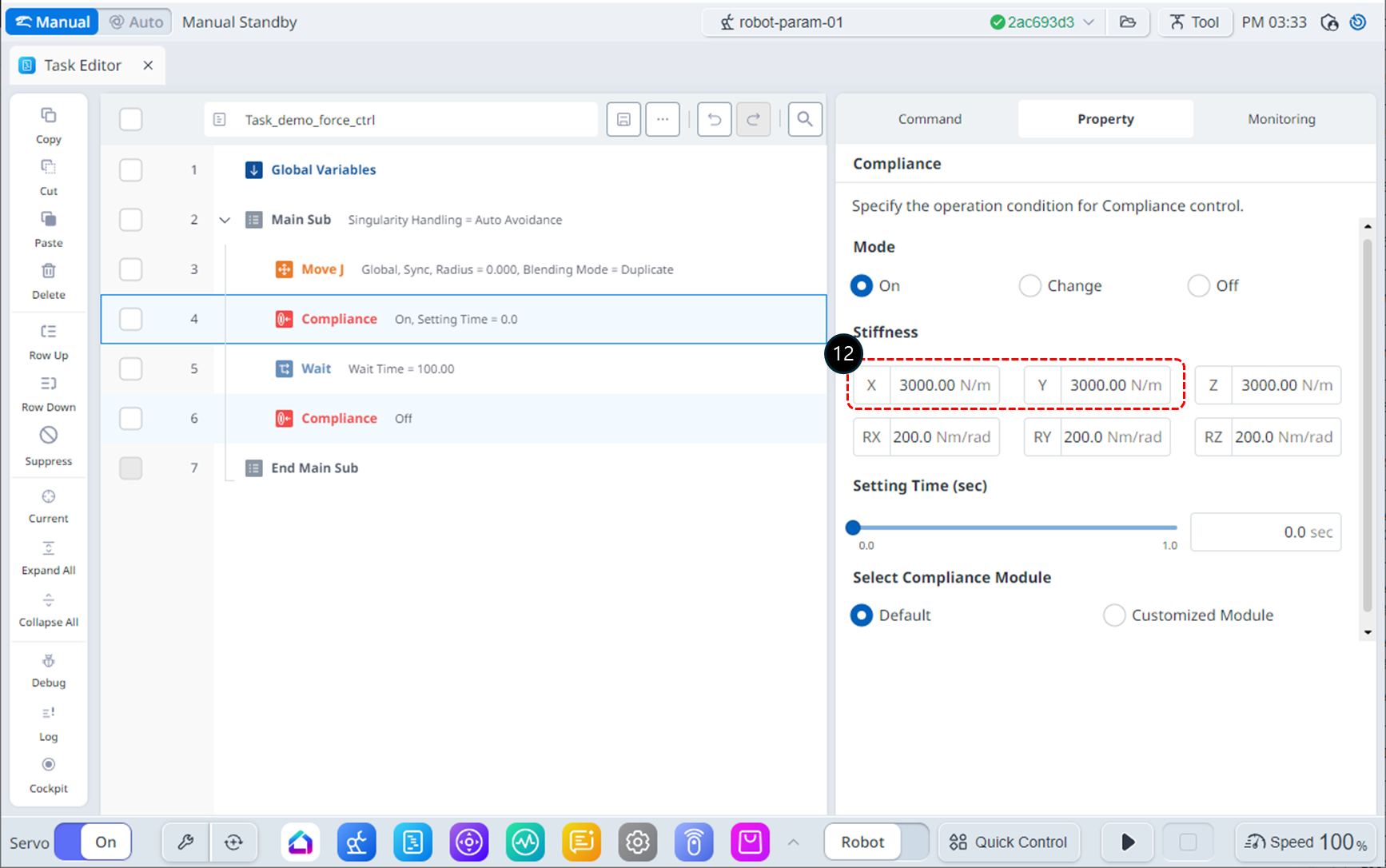
Állítsa be a merevséget az alapértelmezett értékekre az alábbiak szerint.
-
X, Y, Z: 3000 N/m (alapértelmezett)
-
Rx, Ry, Rz: 200 Nm/rad (alapértelmezett)
-
-
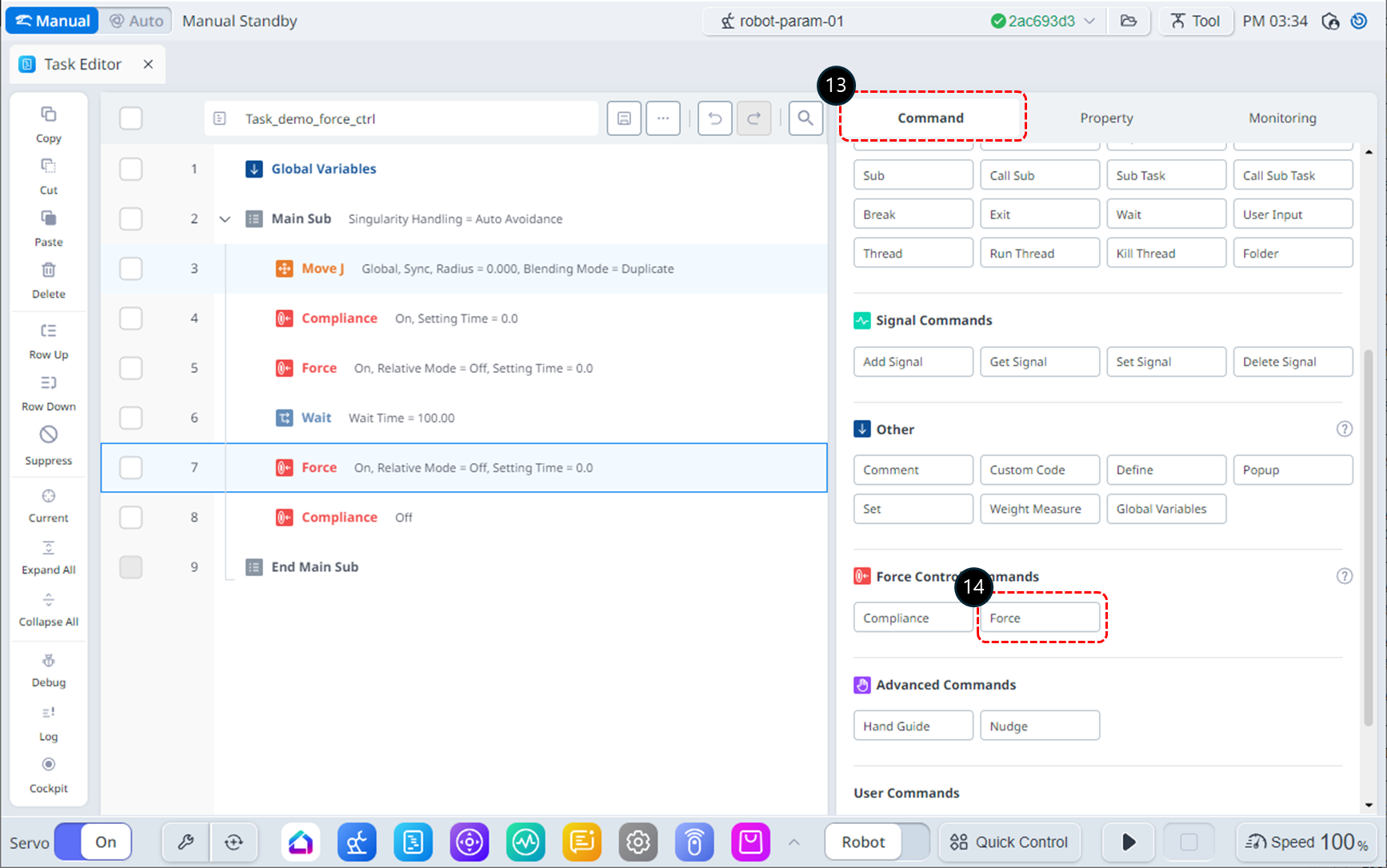
Válassza a Command fület.
-
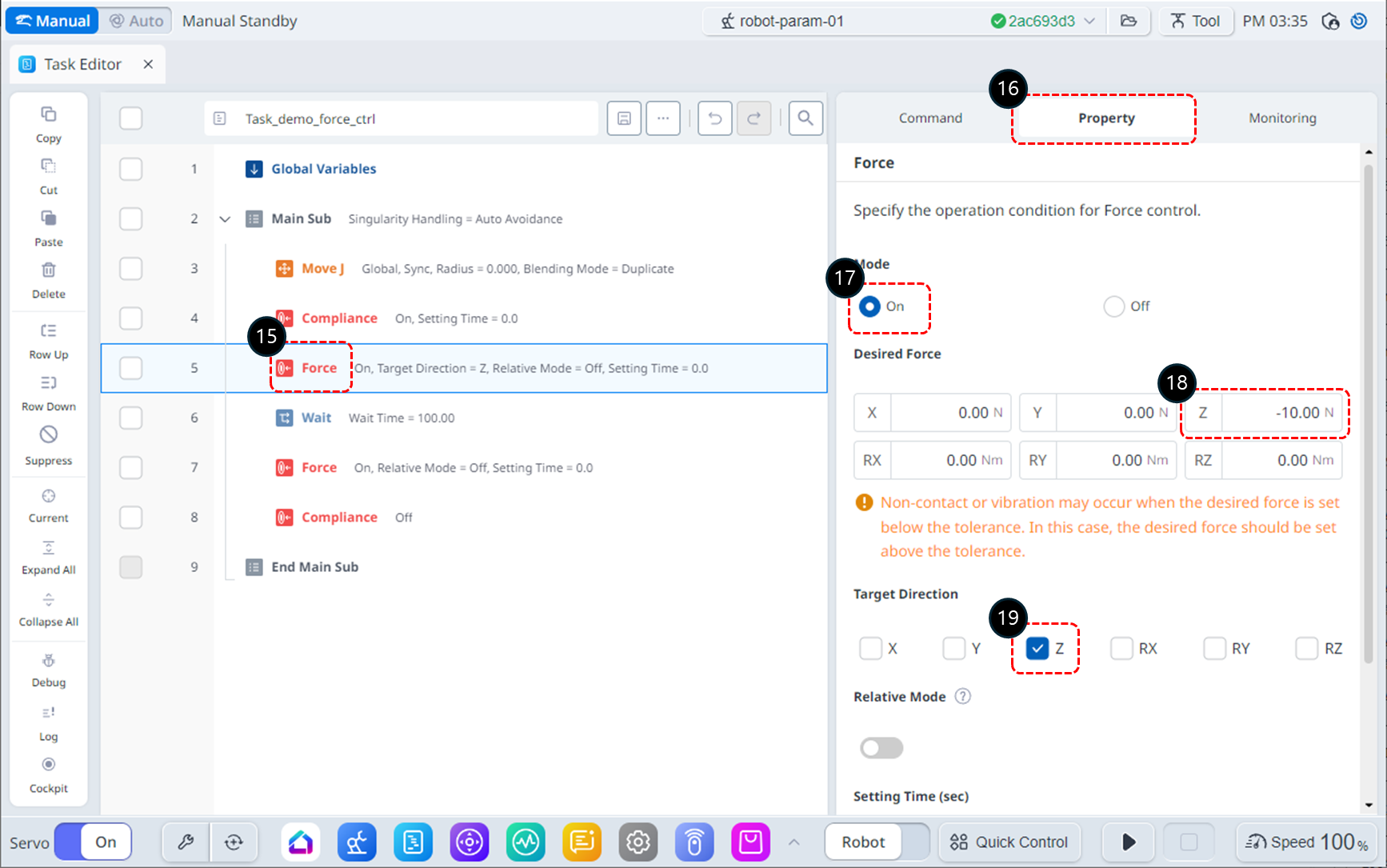
Adjon hozzá egy Force parancsot az 5. És 7. Sorhoz. Ezek a parancsok az erőszabályozás aktiválására és deaktiválására szolgálnak.
-
Válassza ki a Force parancsot az 5. Sorban.
-
Lépjen a Tulajdonság lapra.
-
Állítsa be az üzemmódot az alábbiak szerint: A bekapcsolt üzemmód aktiválja az erőszabályozást.
-
Üzemmód: Be
-
-
Állítsa be a kívánt erőt az alábbiak szerint.
-
X: 0 N (alapértelmezett)
-
Y: 0 N (alapértelmezett)
-
Z: -10 N
-
Rx, Ry, Rz: 0 Nm/rad (alapértelmezett)
-
-
A célirányban csak a z-tengelyt ellenőrizze.
-
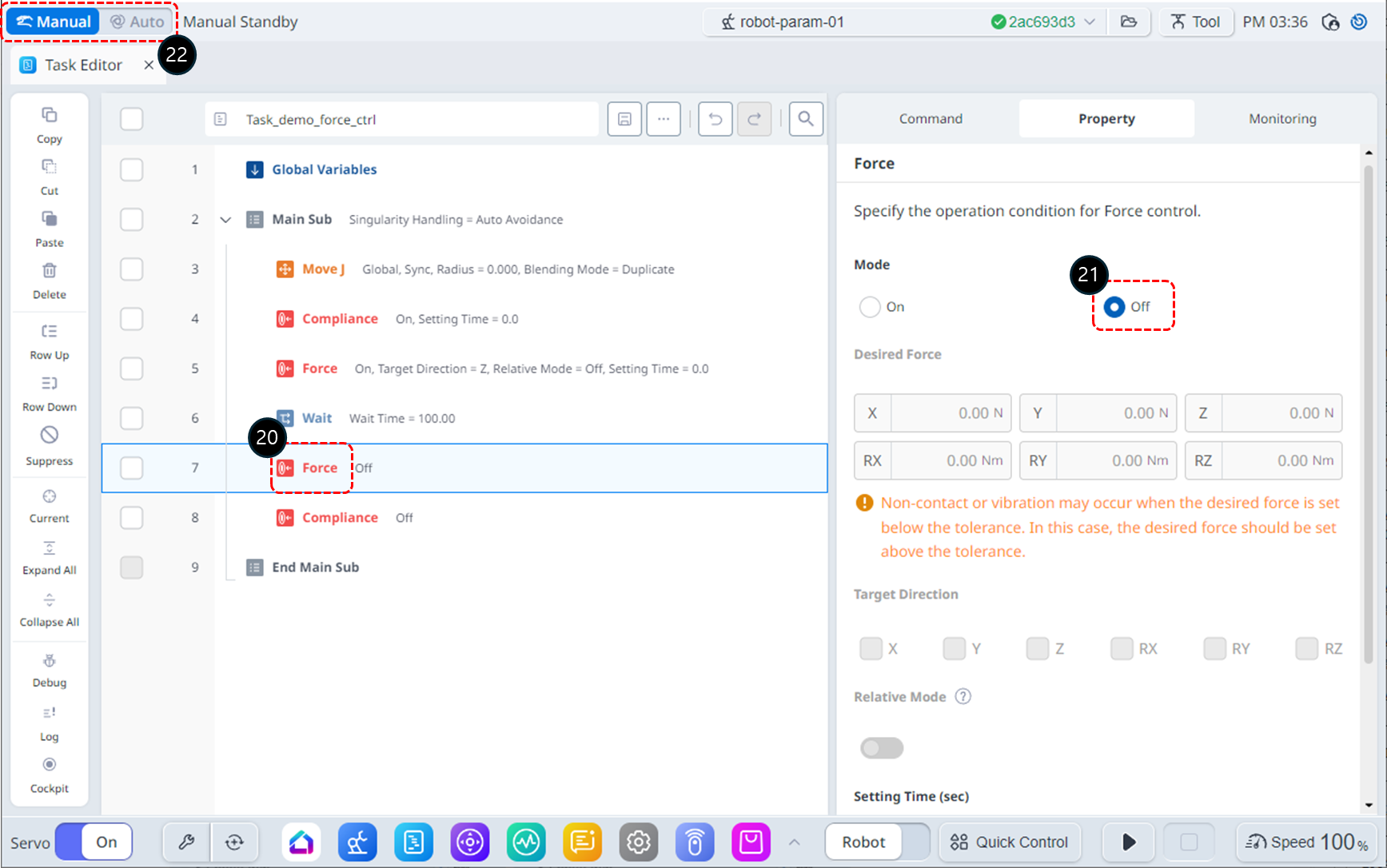
A Feladatlistában válassza ki az 7. Sorban található Force parancsot.
-
Állítsa be az üzemmódot az alábbiak szerint: A kikapcsolt üzemmód kikapcsolja az erőszabályozást.
-
Üzemmód: Ki
-
-
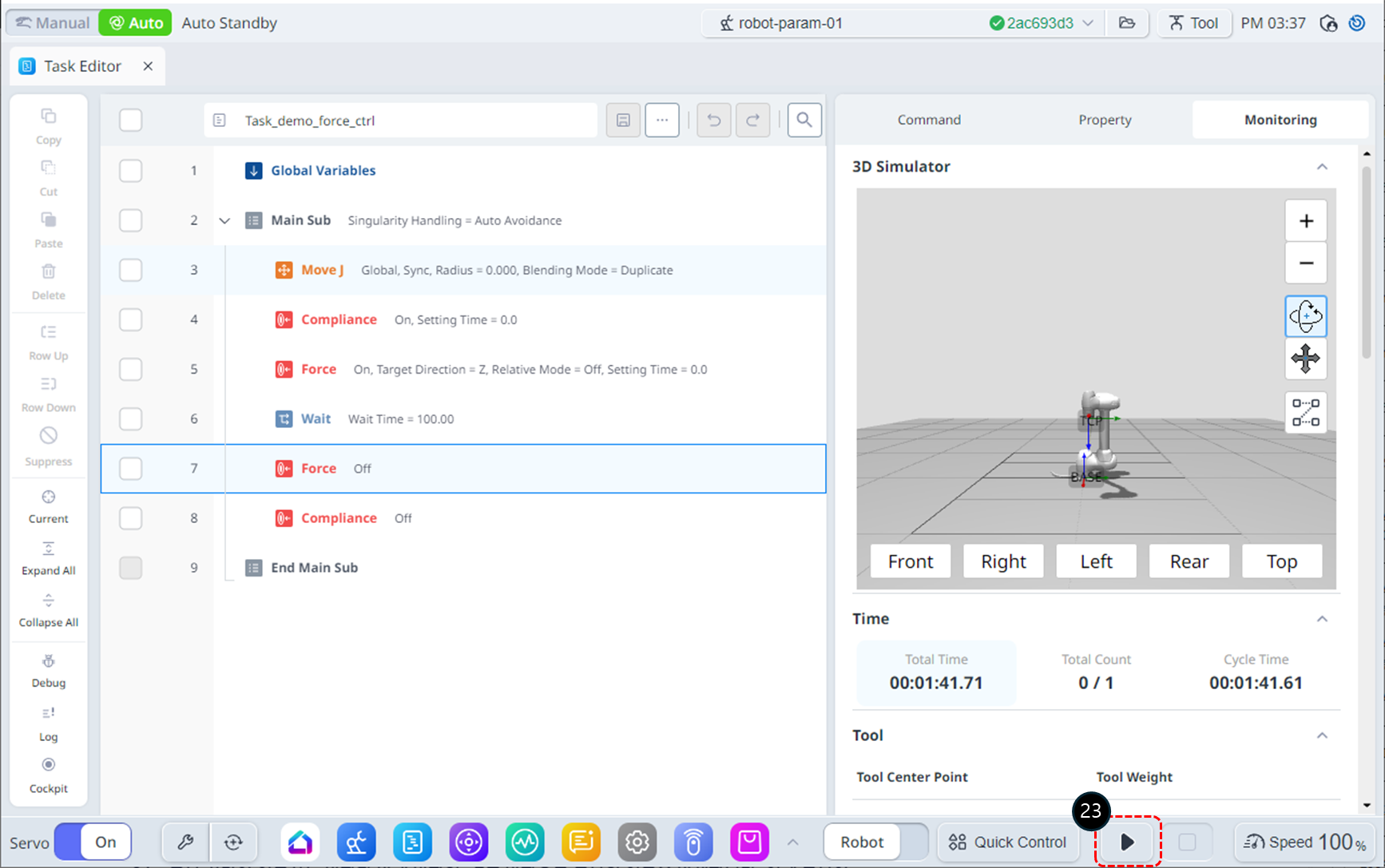
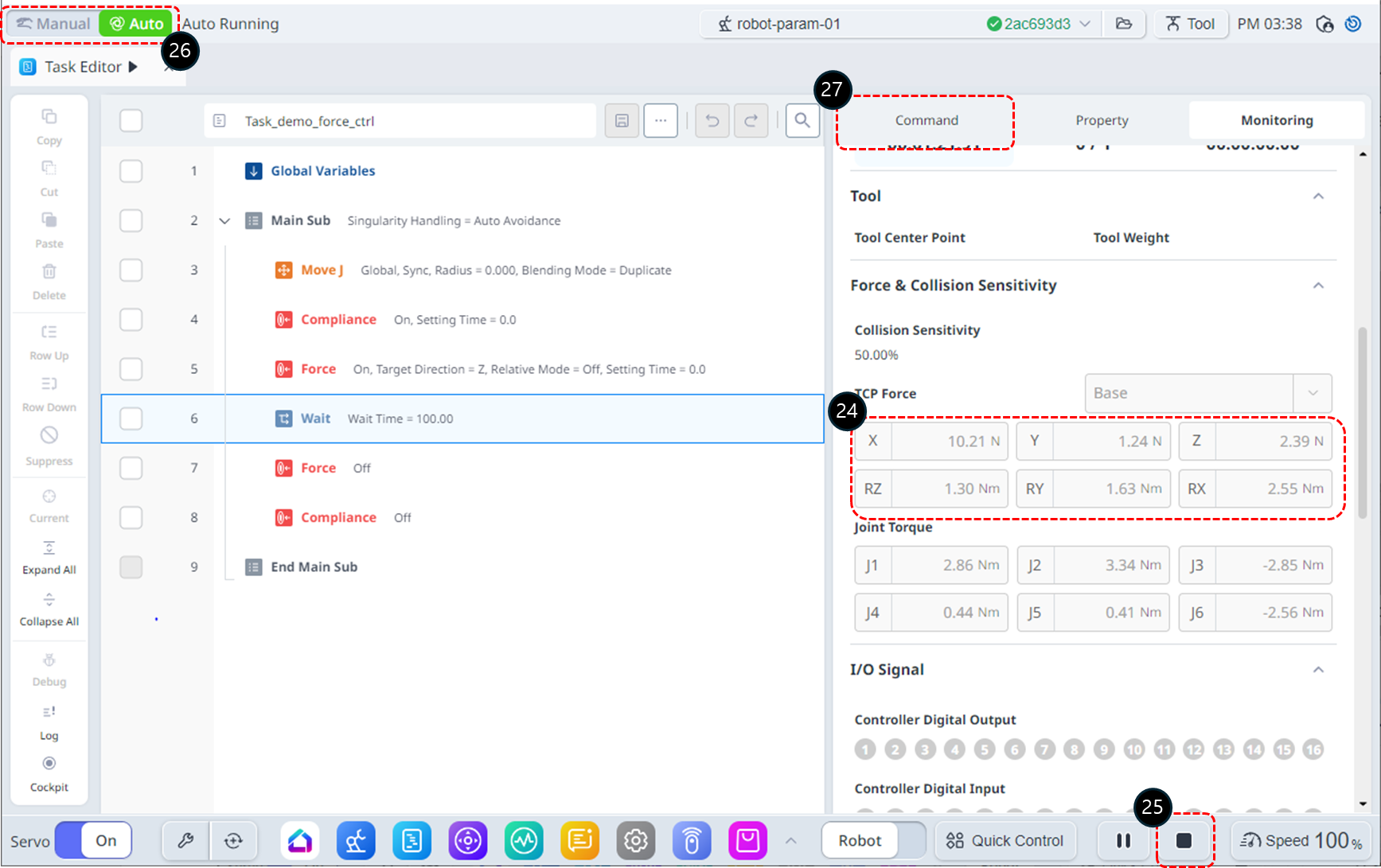
Kapcsolja a működési módot auto állásba. A Tulajdonság lap automatikusan átvált a Monitorozás lapra.
-
Kattintson a Futtatás gombra. Várakozási állapotban a robot a következőképpen működik:
-
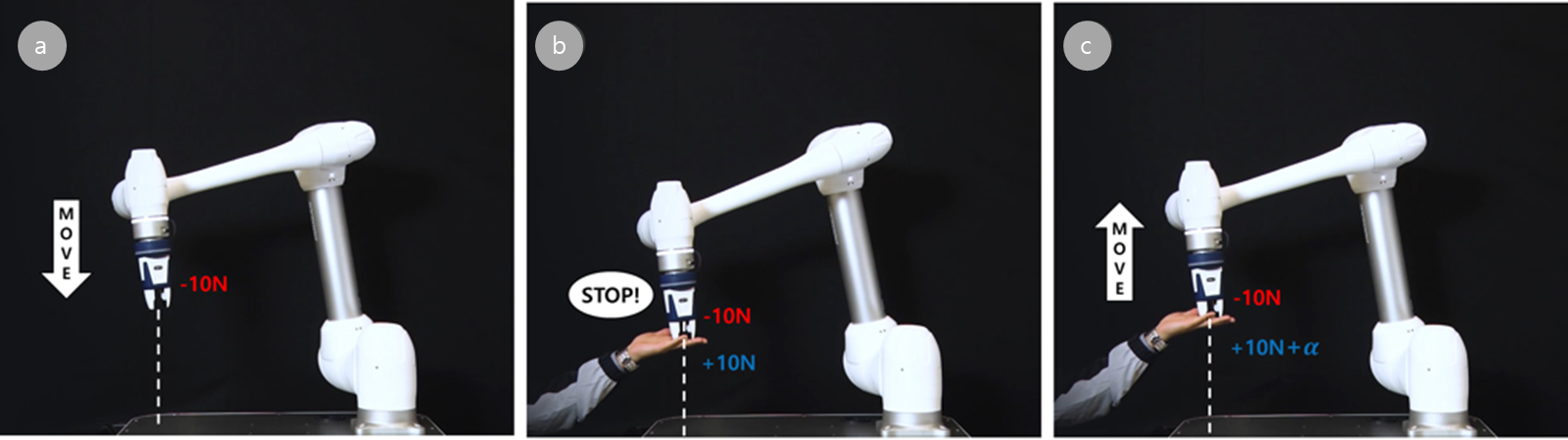
A robot végeffektoránál -10 N erőt alkalmaznak, ami a robotot lassan -z irányba mozgatja.
-
A robot mozgásával ellentétes ellentétes hatást fejtsen ki a +z irányban. Amikor a robot által kifejtett erő és az ellentétes erő egyensúlyban van, a robot úgy tűnik, hogy úgy tartja a pozícióját, mintha álló lenne.
-
Ha +10N-nél nagyobb erőt alkalmaznak a robotra, akkor az az alkalmazott erő irányába mozdul el.
-
-
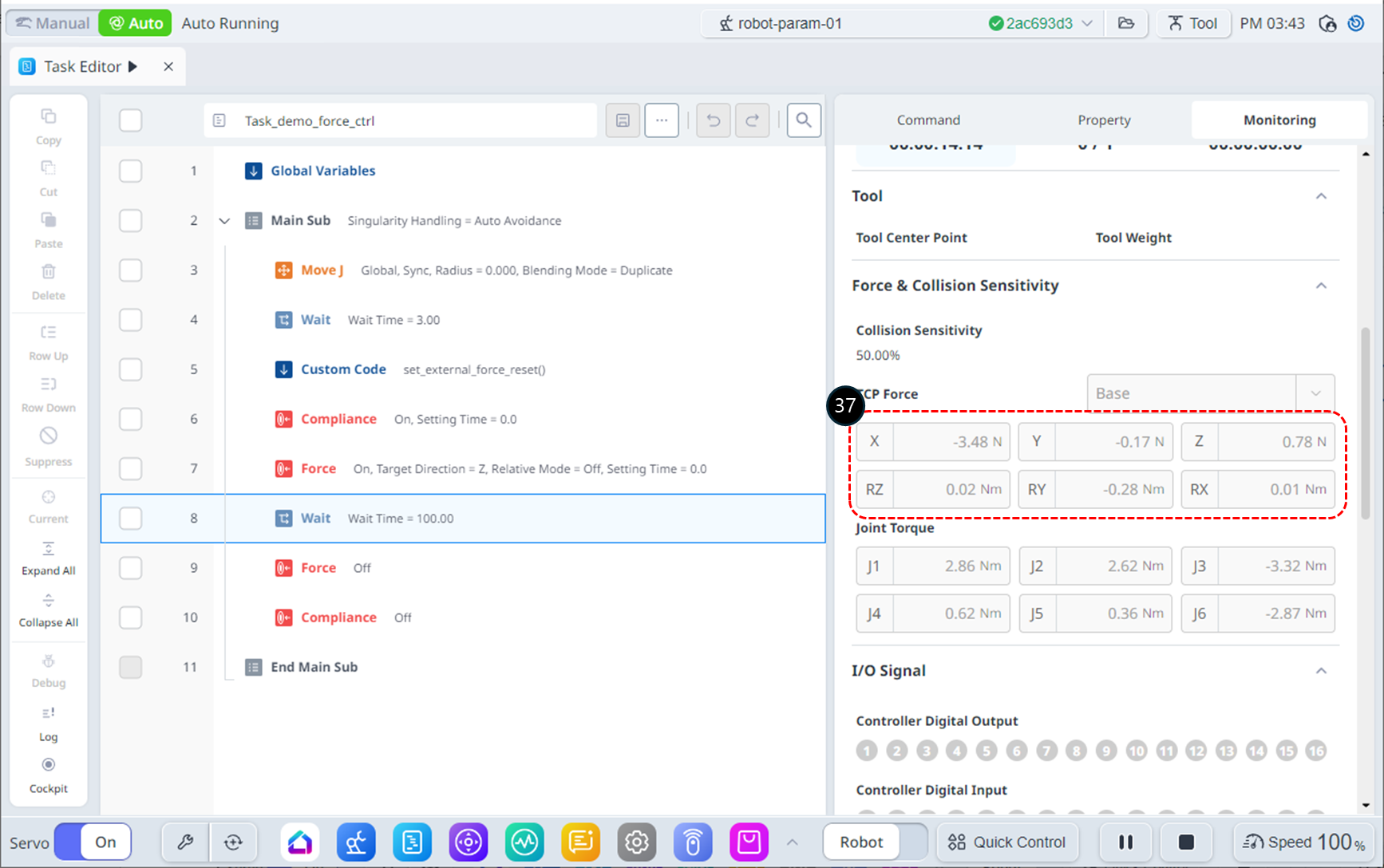
Működés közben a valós idejű TCP-erőt a Megfigyelés lap TCP-erő részében figyelheti. Ha a robot végeffektorára nincs erő alkalmazva, a TCP-erő értékei mind 0-esek legyenek, de előfordulhat, hogy hibaösszetevők jelennek meg. Az alábbiakban egy további magyarázatot talál a probléma megoldására.
-
A feladat befejezéséhez kattintson a Leállítás gombra.
-
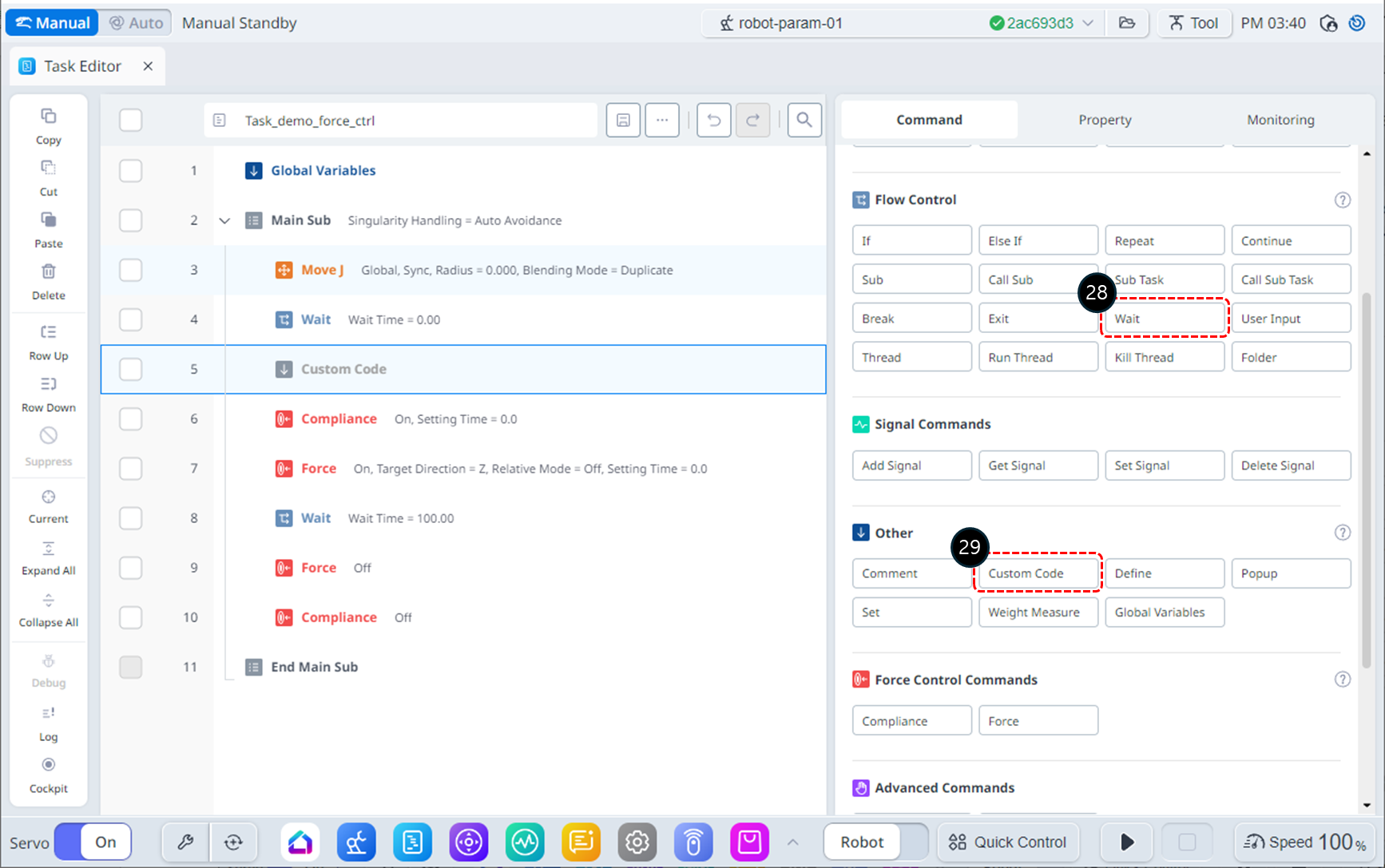
A feladat módosításához kapcsolja a működési módot Kézi üzemmódra.
-
Válassza a Command fület.
-
Adjon hozzá egy várakozási parancsot a Feladatlista 4. Sorához.
-
Adjon hozzá egy Egyéni kód parancsot a Feladatlista 5. Sorához.
-
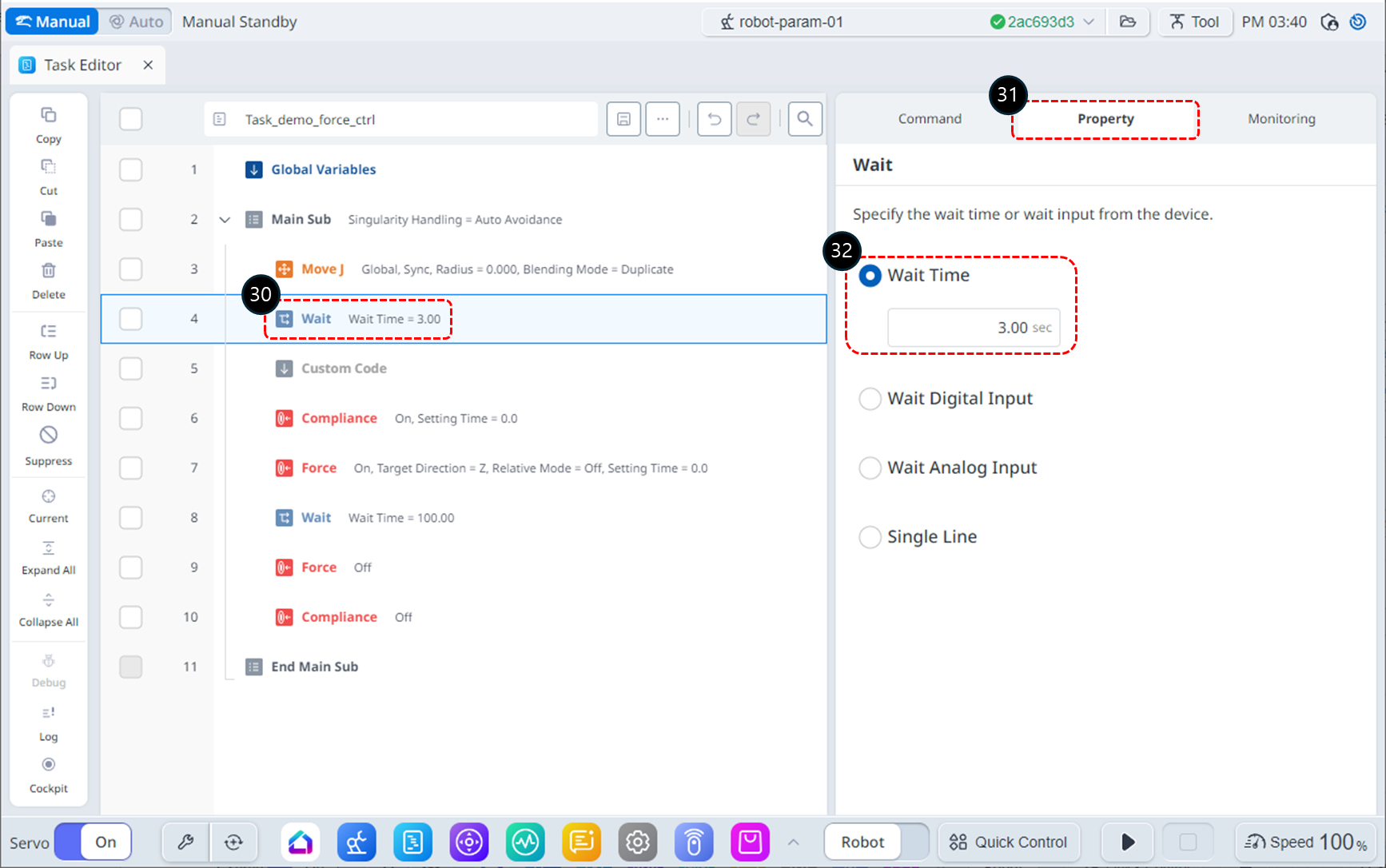
Válassza ki a várakozás parancsot a 4. Sorban.
-
Válassza a Tulajdonság fület.
-
Állítsa be a várakozási időt az alábbiak szerint.
-
Várakozási idő: 3 mp
-
-
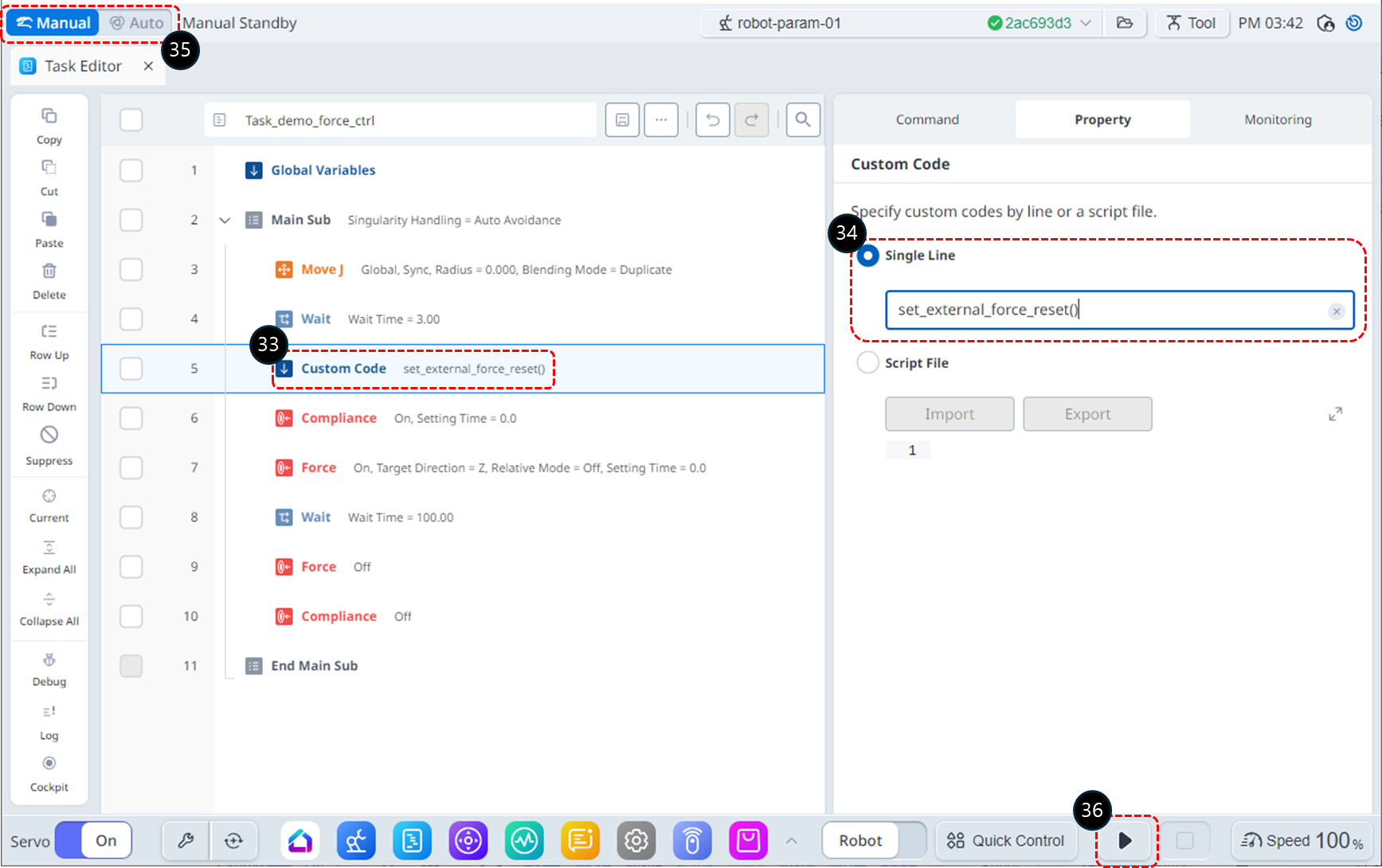
Válassza ki az Egyéni kód parancsot a 5. Sorban.
-
Válassza az Egysoros lehetőséget, és adja hozzá a következő DRL parancsot: Ez a parancs visszaállítja a külső erőérzékelő értékeit, hogy eltávolítsa a hibákat.
-
set_externl_force_reset()
-
-
Kapcsolja a működési módot auto állásba. A Tulajdonság lap automatikusan átvált a Monitorozás lapra.
-
Kattintson a Futtatás gombra.
-
A Monitorozás lapon ellenőrizze a TCP-erő értékeit. A SET_External_Force_RESET() parancs használata előtt a hibát a SET_External_Force_RESET() paranccsal összehasonlítva csökkentettük.