Termékbevezetés (CS-12P)
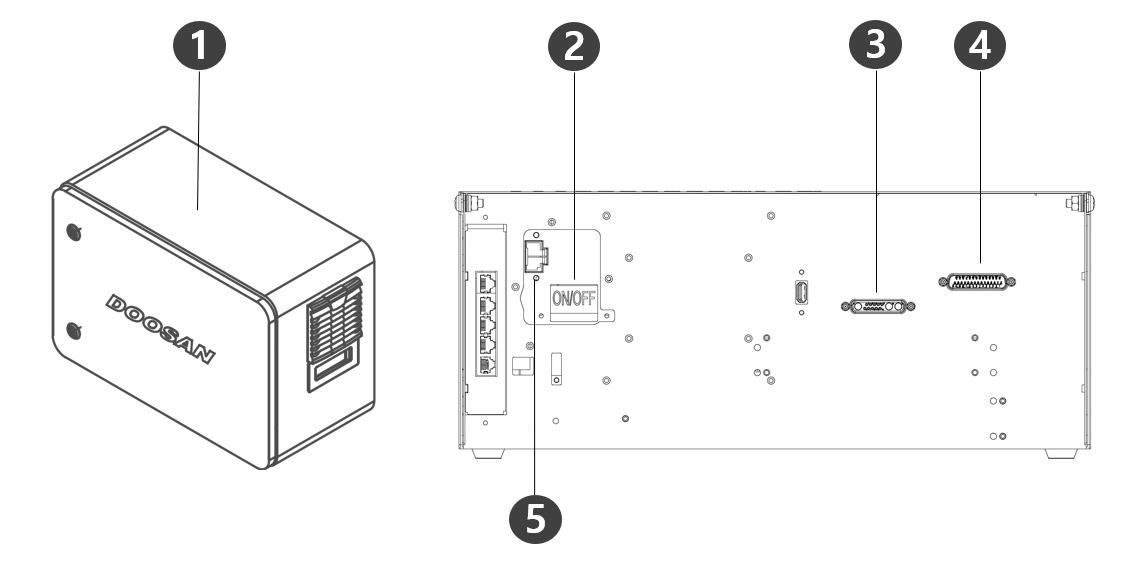
Az egyes részek és funkciók neve
|
No. |
Elemek |
Leírás |
|
1 |
I/O csatlakozó (belső) |
Más robotok vezérlőivel vagy perifériáival is csatlakoztatható. |
|
2 |
Tápkapcsoló |
A vezérlő fő áramellátásának BE-/kikapcsolására szolgál. |
|
3 |
Tanítsa meg a függő kábel csatlakozóját |
A tanítási medál kábelének a vezérlőhöz való csatlakoztatására szolgál. |
|
4 |
robot kábelcsatlakozó |
A robotkábelt a vezérlőhöz csatlakoztatja. |
|
5 |
Tápcsatlakozó-csatlakozó |
A vezérlő tápellátásának csatlakoztatására szolgál. |
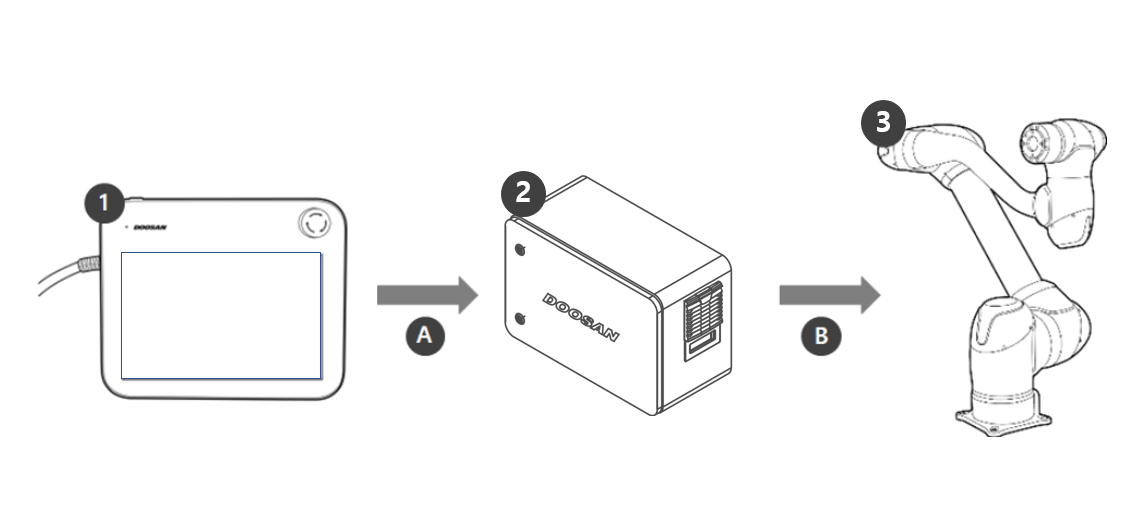
Rendszerkonfiguráció
|
No. |
Név |
Leírás |
|---|---|---|
|
1 |
Betanító panel |
Ez az eszköz kezeli az egész rendszert, és képes megtanítani a robot specifikus pózokat, vagy a manipulátorokhoz és vezérlőkhöz kapcsolódó beállításokat. |
|
2 |
Vezérlő |
A robot mozgását a tanítási medál által beállított póznak vagy mozgásnak megfelelően szabályozza. Különböző I/O portokkal rendelkezik, amelyek lehetővé teszik a különböző berendezések és eszközök csatlakoztatását és használatát. |
|
3 |
Manipulátor |
Ez egy ipari kollaboratív robot, amely különböző eszközökkel képes szállítási vagy összeszerelési feladatokat elvégezni. |
|
A |
Command/Monitoring |
|
|
B |
Tápellátás/hálózat |
|
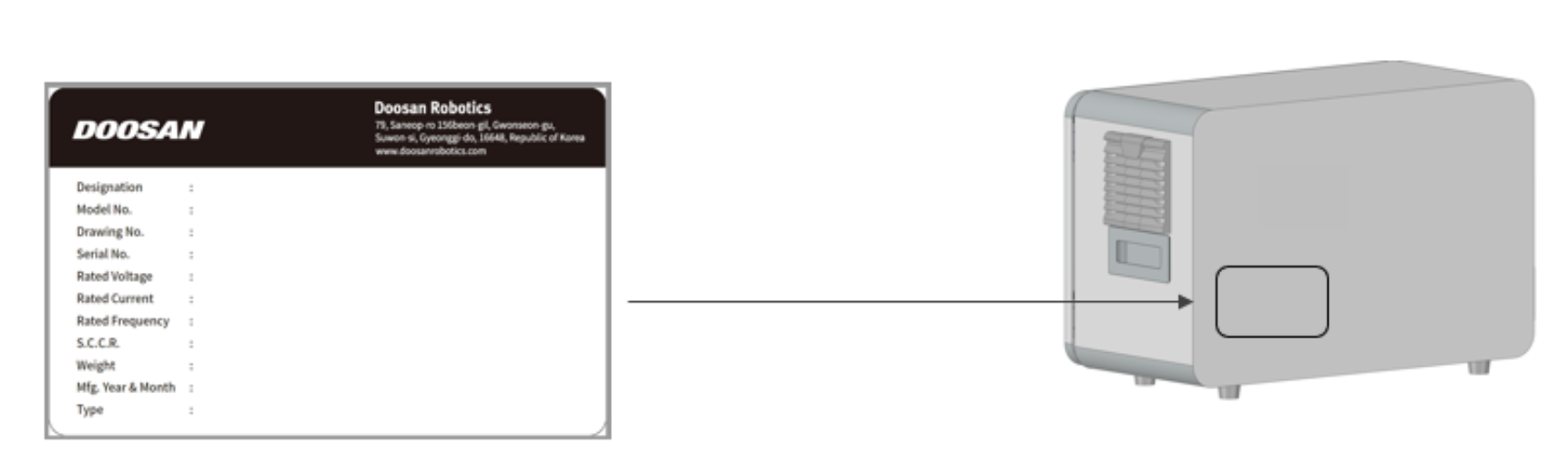
Névtábla és címke
Telepítés (CS-12P)
Figyelmeztetés a telepítés során
Vigyázat
-
Biztosítson elegendő helyet a vezérlő telepítése előtt. Ha nincs elegendő hely, a vezérlő megsérülhet, vagy a manipulátor vagy a tanítási medál kábel hiányozhat.
-
Ellenőrizze a bemeneti tápellátást, amikor tápellátást csatlakoztat a készülékhez. Ha a csatlakoztatott bemeneti tápegység eltér a névleges bemenettől (22-60VDC), akkor a készülék sok esetben nem működik megfelelően, vagy a vezérlő károsodhat.
Telepítési környezet
A vezérlő telepítésekor vegye figyelembe a következőket.
-
Biztosítson elegendő helyet a vezérlő telepítése előtt.
-
A vezérlőt rögzíteni kell.
-
Győződjön meg róla, hogy a mozgó járműben nincs alkatrész rögzítve.
Hardveres telepítés
Szerelje fel a robotot, a vezérlőt és a tanítási medált, a rendszer kulcsfontosságú alkatrészeit, és a manipulátor működtetése előtt táplálja őket. Az egyes elemek felszerelésére vonatkozó utasítások a következők:
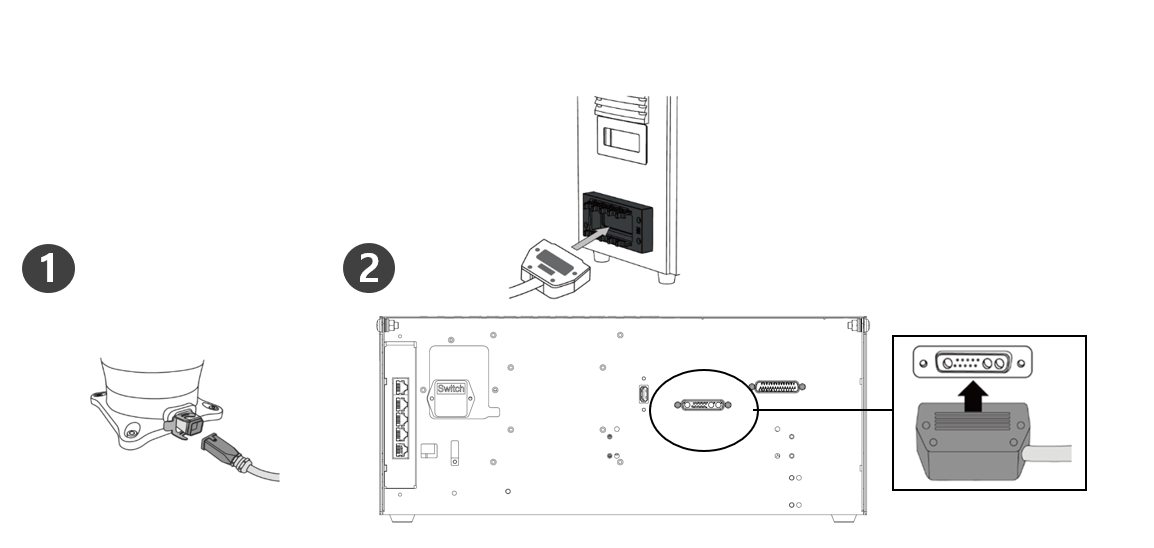
A manipulátor csatlakoztatása a vezérlőhöz
|
|
Leírás |
|---|---|
|
1 |
Csatlakoztassa a manipulátor kábelét a vezérlőhöz, és helyezzen egy biztosítógyűrűt
|
|
2 |
A manipulátor csatlakozókábelének a kontroller ellenkező végét csatlakoztassa
|
Vigyázat
-
Ne húzza ki a manipulátor kábelét, amíg a robot be van kapcsolva. Ez a robot meghibásodását okozhatja.
-
Ne kíséreljen meg semmilyen módosítást vagy hosszabbítást a manipulátor kábelén.
-
Amikor a vezérlőt a padlóra helyezi, a megfelelő szellőzés biztosítása érdekében mindkét oldalon legalább 50 mm hézagot rögzítsen.
-
Mielőtt bekapcsolná a vezérlőt, győződjön meg róla, hogy megfelelően lezárta a csatlakozókat.
Megjegyzés
-
A rendszer konfigurálásakor a zajhatások és a rendszer meghibásodásának megelőzése érdekében ajánlott egy zajcsökkentő beszerelése.
-
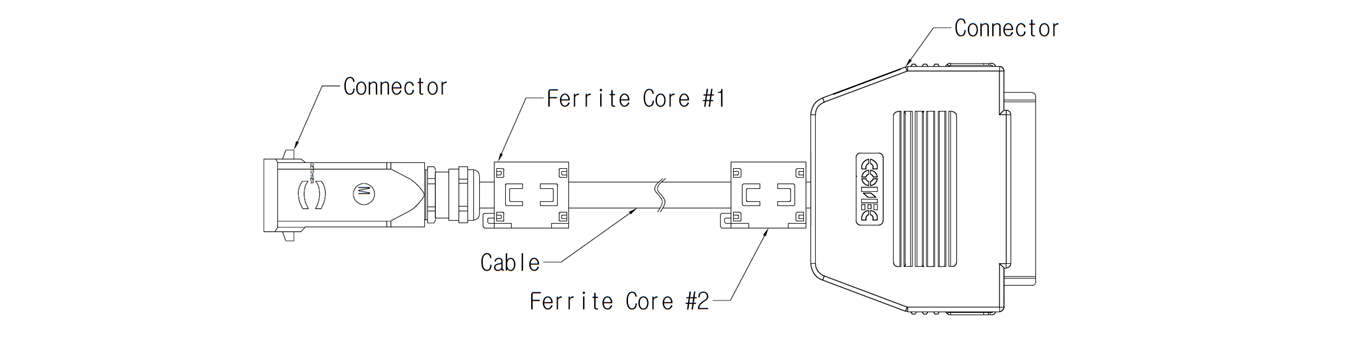
Ha a vezérlőt elektromágneses hullámok által keltett zaj befolyásolja, a normál működés biztosítása érdekében ferritmagot kell telepíteni. A telepítés helye a következő:
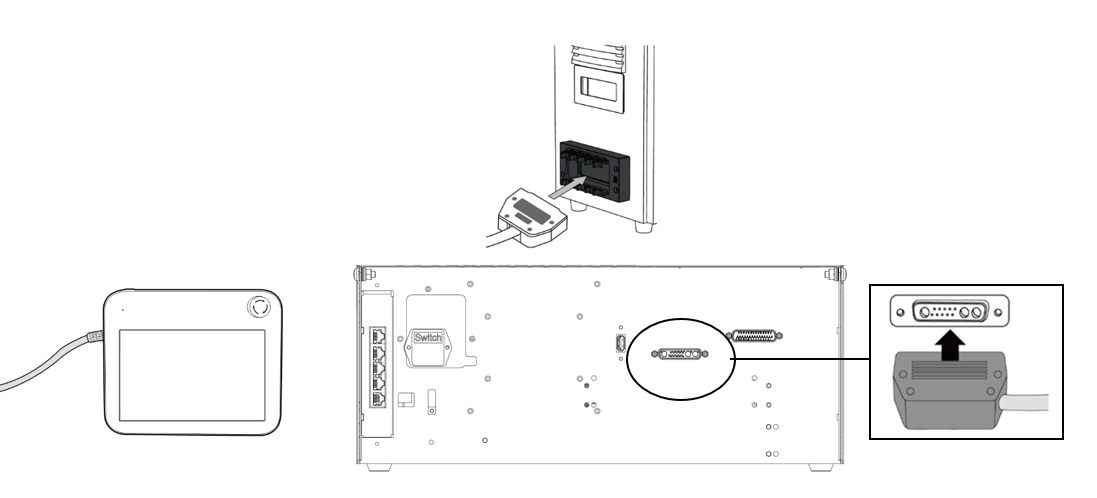
Csatlakoztassa a vezérlőt a medál tanításához
Csatlakoztassa a tanítási medál kábelt a vezérlő megfelelő csatlakozóihoz, amíg kattanni nem kezd, és ellenőrizze, hogy a kábel szorosan csatlakozik-e.
Vigyázat
-
A kábel csatlakoztatásakor ellenőrizze a csatlakozás alakját, mielőtt csatlakoztatná, hogy a csap ne görbüljön.
-
Ha a tanítási medált a mobil járműre vagy a vezérlőre függesztve használja, ügyeljen arra, hogy ne nyúljon a csatlakozókábelekhez.
-
Ügyeljen arra, hogy ne engedje, hogy a vezérlő, tanítsa medál és kábel érintkezzen vízzel.
-
Ne szerelje fel a vezérlőt, és ne tanítsa a medált poros vagy nedves környezetben.
-
A vezérlőket és az intelligens medált soha nem szabad IP20 fokozatú porkörnyezetnek kitenni. Legyen különösen óvatos vezetőképes porral rendelkező környezetben.
Megjegyzés
-
A rendszer konfigurálásakor a zajhatások és a rendszer meghibásodásának megelőzése érdekében ajánlott egy zajcsökkentő beszerelése.
-
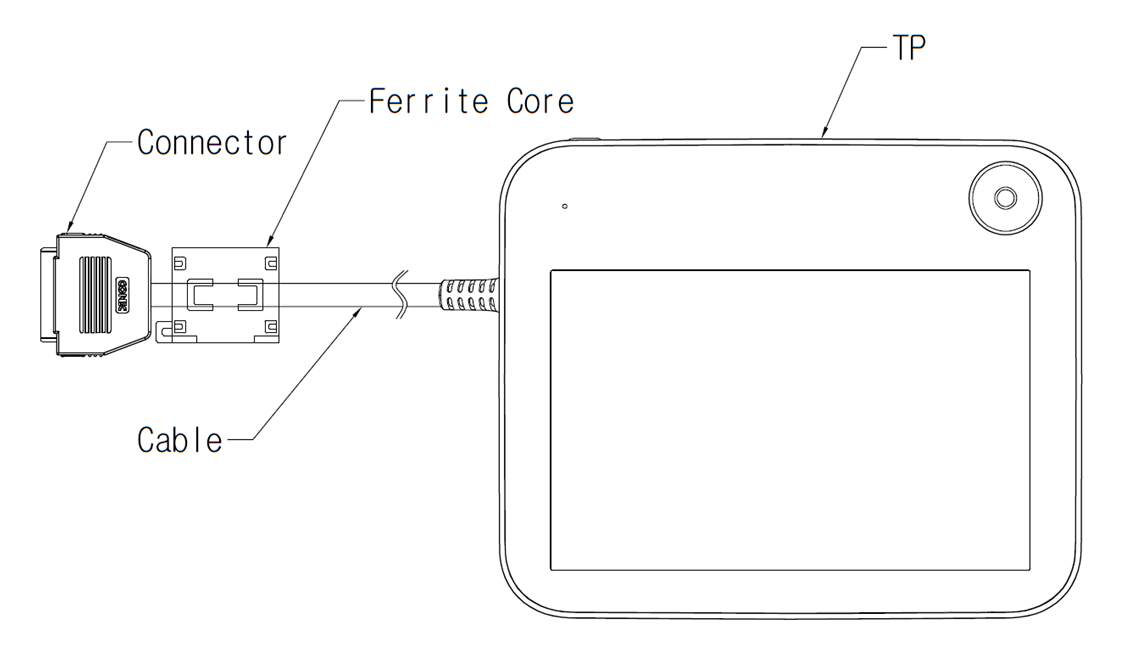
Ha a tanítási medált elektromágneses hullámok által keltett zaj befolyásolja, a normál működés biztosítása érdekében ferrit magot kell telepíteni. A telepítés helye a következő:
Manipulátor kábel és tanítási medál kábel elhelyezése
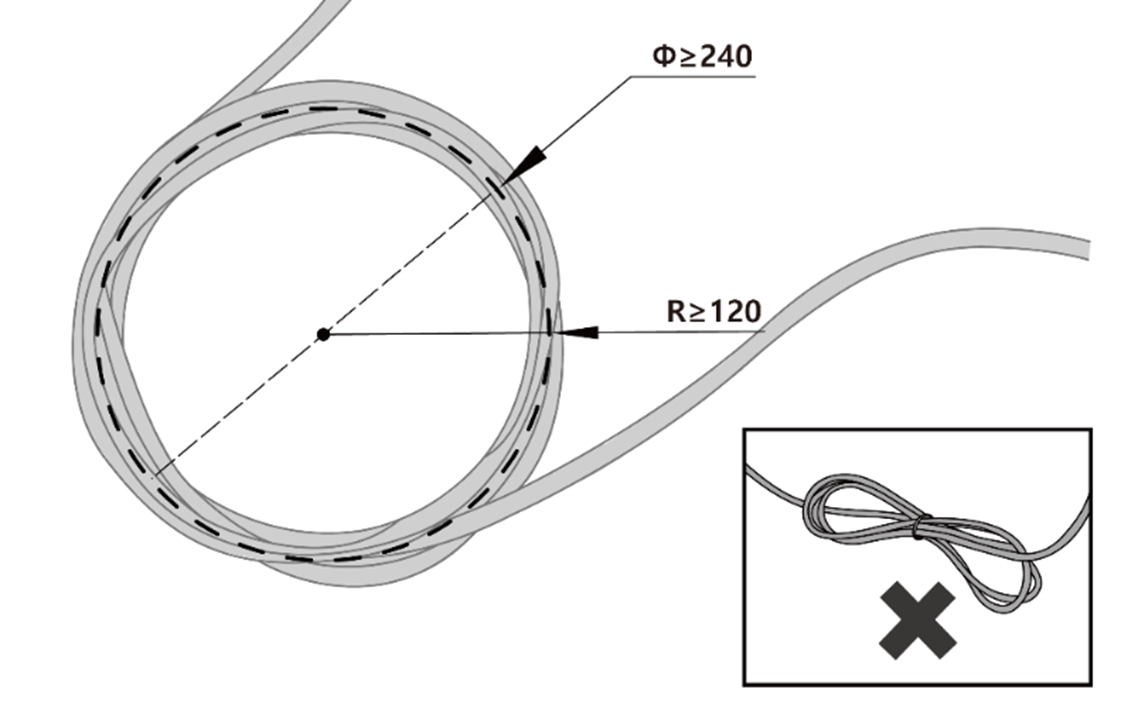
Győződjön meg arról, hogy a manipulátor és a medál kábel görbületi sugara nagyobb, mint a minimális görbületi sugár (120 mm).
Vigyázat
-
Győződjön meg arról, hogy a Teach medál kábel és a Teach medál csatlakozó közötti görbületi sugár nagyobb, mint a minimális görbületi sugár (120 mm).
-
Ha a görbületi sugár kisebb, mint a minimális görbületi sugár (120 mm), a kábel leválása vagy a termék károsodása fordulhat elő.
-
Olyan környezetben, ahol elektromágneses zaj fordulhat elő, a hibás működés elkerülése érdekében megfelelő kábeltelepítést kell végezni.
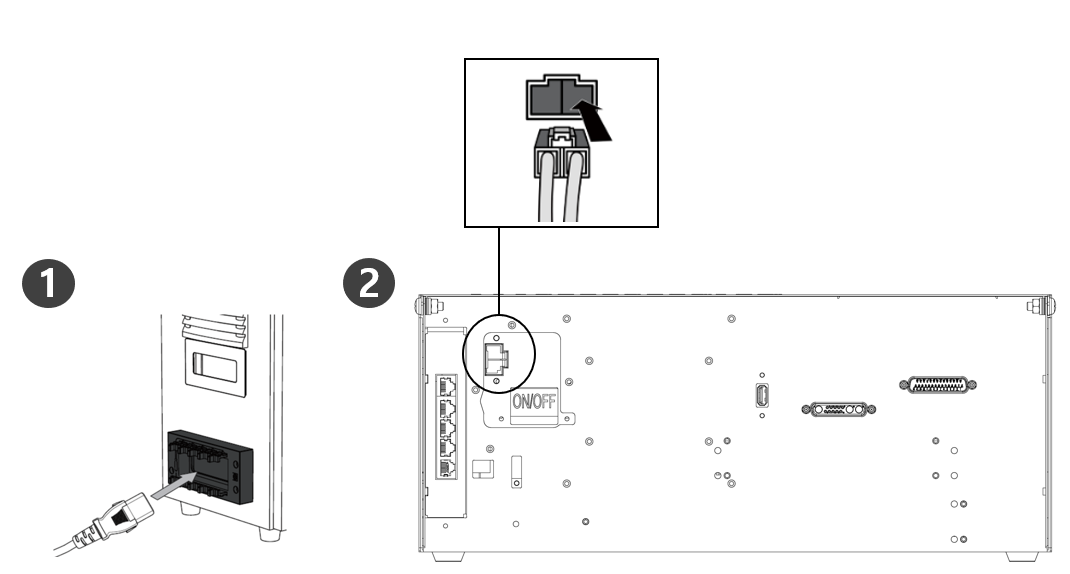
Tápellátás csatlakoztatása a vezérlőhöz
Csatlakoztassa a tápkábelt a vezérlő megfelelő csatlakozóihoz, amíg az kattanni nem kezd, és ellenőrizze, hogy a kábel szorosan csatlakozik-e.
Figyelmeztetés
-
Ellenőrizze, hogy a robot megfelelően földelt-e, miután csatlakoztatta a tápkábeleket (elektromos testelés-csatlakozások). Hozzon létre egy közös talajt a rendszer összes berendezése számára a vezérlőn belüli testelés szimbólumhoz kapcsolódó, fel nem használt csavarokkal. A testelővezetéknek meg kell felelnie a rendszer maximális áramerősségének.
-
Védje meg a vezérlő bemeneti teljesítményét olyan eszközökkel, mint például egy megszakító.
-
Ne módosítsa vagy hosszabbítsa meg a robotkábelt. Tűz vagy vezérlő meghibásodását okozhatja.
-
A vezérlő tápellátása előtt ellenőrizze, hogy minden kábel megfelelően van-e csatlakoztatva. Mindig a termékcsomagban található eredeti kábelt használja.
-
Ügyeljen arra, hogy a bemeneti feszültség polaritását ne csatlakoztassa helytelenül.
Megjegyzés
-
A rendszer konfigurálásakor ajánlott olyan tápkapcsolót telepíteni, amely képes egyszerre kikapcsolni az összes eszközt.
-
Ha DC vezérlőt használ, a robot mozgása a terheléstől és a mozgástól függően korlátozott lehet.
-
Ha a bemeneti feszültség kevesebb, mint 48 V, a robot mozgása a terhelés és a mozgás függvényében korlátozható.
-
A tápellátásnak meg kell felelnie a minimális követelményeknek, például a testelés és az áramköri megszakítóknak. Az elektromos jellemzők a következők:
|
Paraméter |
Műszaki adatok |
|
Bemeneti feszültség |
22–60 V DC |
|
Névleges bemeneti áram |
30 A |